2.5. THEORIES OF STRAIGHT BEAMS 71 2.5 Theories...
17
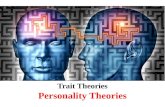
“EVPM3ed02” — 2016/6/10 — 7:20 — page 71 — #25 2.5. THEORIES OF STRAIGHT BEAMS 71 2.5 Theories of Straight Beams 2.5.1 Introduction Most practical engineering structures, microscale or macroscale, consist of mem- bers that can be classified as beams, plates, and shells, called structural mem- bers. Beams are structural members that have a ratio of length-to-cross- sectional dimensions very large, say 10 to 100 or more, and subjected to forces both along and transverse to the length and moments that tend to rotate them about an axis perpendicular to their length [see Fig. 2.5.1(a)]. When all applied loads are along the length only, they are often called bars (i.e., bars experience only tensile or compressive strains and no bending deformation). Cables may be viewed as very flexible form of bars, and they can only take tension and not compression. Plates are two-dimensional versions of beams in the sense that one of the cross-sectional dimensions of a plate can be as large as the length. The smallest dimension of a plate is called its thickness. Thus, plates are thin bodies subjected to forces in the plane as well as in the direction normal to the plane and bending moments about either axis in the plane [see Fig. 2.5.1(b)]. A shell is a thin structure with curved geometry [see Fig. 2.5.1(c)] and can be subjected to distributed as well as point forces and moments. Because of their geometries and loads applied, beams, plates, and shells are stretched and bent from their original shapes. The difference between structural elements (c) Cantilever beam AFM (atomic micro scope) tip Current (a) (b) Fig. 2.5.1: (a) An AFM cantilever beam. (b) A narrow plate strip subjected to a vertical force. (c) A hyperboloidal shell. The deformations shown for (b) and (c) are exaggerated.
Transcript of 2.5. THEORIES OF STRAIGHT BEAMS 71 2.5 Theories...

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 71 — #25 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 71
2.5 Theories of Straight Beams
2.5.1 Introduction
Most practical engineering structures, microscale or macroscale, consist of mem-bers that can be classified as beams, plates, and shells, called structural mem-bers. Beams are structural members that have a ratio of length-to-cross-sectional dimensions very large, say 10 to 100 or more, and subjected to forcesboth along and transverse to the length and moments that tend to rotate themabout an axis perpendicular to their length [see Fig. 2.5.1(a)]. When all appliedloads are along the length only, they are often called bars (i.e., bars experienceonly tensile or compressive strains and no bending deformation). Cables maybe viewed as very flexible form of bars, and they can only take tension and notcompression. Plates are two-dimensional versions of beams in the sense thatone of the cross-sectional dimensions of a plate can be as large as the length.The smallest dimension of a plate is called its thickness. Thus, plates are thinbodies subjected to forces in the plane as well as in the direction normal to theplane and bending moments about either axis in the plane [see Fig. 2.5.1(b)].A shell is a thin structure with curved geometry [see Fig. 2.5.1(c)] and canbe subjected to distributed as well as point forces and moments. Because oftheir geometries and loads applied, beams, plates, and shells are stretched andbent from their original shapes. The difference between structural elements
(c)
Cantilever beam
AFM (atomic micro scope) tip
Current
(a)
(b)
Fig. 2.5.1: (a) An AFM cantilever beam. (b) A narrow plate strip subjected to a verticalforce. (c) A hyperboloidal shell. The deformations shown for (b) and (c) are exaggerated.
jnreddy
Text Box
This is a part of the revised chapter in the new edition of the textbook (Energy Principles and Variational Methods in Applied Mechanics), which will appear in 2017. These notes should help you see how the von Karmnan nonlinear equations of Euler-Bernoulli and Timoshenko beams are derived. JN Reddy (19 Oct. 2016)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 72 — #26 ii
ii
ii
72 REVIEW OF EQUATIONS OF SOLID MECHANICS
and three-dimensional solid bodies, such as solid blocks and spheres, that haveno restrictions on their geometric make up, is that the latter may change theirgeometries but they may not show significant “bending” deformation.
Although all solids can be analyzed for stress and deformation using theelasticity equations reviewed in the preceding sections of this chapter, their ge-ometries allow us to develop theories that are simple and yet yield results thatare accurate enough for engineering analysis and design. Structural mechanics isa branch of solid mechanics that deals with the study of beams (frames), plates,and shells using theories that are derived from three-dimensional elasticity the-ory by making certain simplifying assumptions concerning the deformation andstress states in these members.
The present section is devoted to the development of structural theories ofstraight beams in bending for the static case. The equations governing beamswill be referenced in the coming chapters and their development in this chapterwill help the reader in understanding the material of the subsequent chapters.Plates will be studied in a chapter devoted entirely for them (see Chapter 7).The geometric description of shells is more involved and they are not coveredin this book to keep the book size within reasonable limits (see, for additionalinformation, Timoshenko and Woinowsky-Krieger [124] and Reddy [50, 51]).
In this section we consider two most commonly used theories of straightbeams. They differ from each other in the representation of displacement andstrain fields. The first one is the Bernoulli–Euler beam theory3, and it is thetheory that is covered in all undergraduate mechanics of materials books. Inthe Bernoulli–Euler beam theory, the transverse shear strain is neglected, mak-ing the beam infinitely rigid in the transverse direction. The second one is arefinement to the Bernoulli–Euler beam theory, known as the Timoshenko beamtheory, which accounts for the transverse shear strain. These two beam theorieswill be developed assuming infinitesimal deformation. Therefore, we use σij tomean Sij , the second Piola–Kirchhoff stress tensor, and xi in place of Xi.
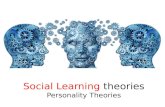
We consider straight beams of length L and symmetric (about the x2-axis)cross section of area A. The x1-coordinate is taken along the centroidal axisof the beam with the x3-coordinate along the thickness (the height) and thex2-coordinate along the width of the beam (into the plane of the page), asshown in Fig. 2.5.2(a). In general, the cross-sectional area A can be a functionof x1. Suppose that the beam is subjected to distributed axial force f(x1) andtransverse load q(x1), and let (u1, u2, u3) denote the total displacements alongthe coordinates (x1 = x, x2 = y, x3 = z). For simplicity of the developmentsonly stretching along the length of the beam and bending about the x2-axis areconsidered here.
3Jacob Bernoulli (1655–1705) was one of the many prominent Swiss mathematicians in theBernoulli family. He, and along with his brother Johann Bernoulli, was one of the founders ofthe calculus of variations. Leonhard Euler (1707–1783) was a pioneering Swiss mathematicianand physicist.

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 73 — #27 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 73
2.5.2 The Bernoulli–Euler Beam Theory
The Bernoulli–Euler beam theory is based on certain simplifying assumptions,known as the Bernoulli–Euler hypothesis, concerning the kinematics of bendingdeformation. The hypothesis states that straight lines perpendicular to thebeam axis before deformation remain (a) straight, (b) inextensible, and (c)perpendicular to the tangent line to the beam axis after deformation.
Figure 2.5.2
3x z=
1x x=
( )q x
( )f x
(a) (b)
(d)
f(x)( )N x
( )M x
( )V x
( )q x
( )f xxxs
xzs
f(x)( )N x ( ) ( )N x N x+D
( ) ( )V x V x+D
( )M x ( ) ( )M x M x+D
( )V x
(c)
( )q x
( )f x
xD
•
•z
Undeformed edge Deformed edge
z
xw u
zx
dwdx
q =-
xq
xu zq+
Fig. 2.5.2: (a) A typical beam with loads. (b) Kinematics of deformation of an Bernoulli–Euler beam theory. (c) Equilibrium of a beam element. (d) Definitions (or internal equilib-rium) of stress resultants.
The Bernoulli–Euler hypothesis leads to the following displacement field [seeFig. 2.5.2(b)]
u1(x, y, z) = u(x)− z dwdx, u2 = 0, u3(x, y, z) = w(x), (2.5.1)
where (u, v, w) are the displacements of a point on the x-axis in the x1 = x,x2 = y and x3 = z coordinate directions, respectively. The infinitesimal strainsare
εxx =∂u1
∂x1=du
dx− z d
2w
dx2, 2εxz =
∂u1
∂x3+∂u3
∂x1= −dw
dx+dw
dx= 0 (2.5.2)
and all other strains are identically zero.A free-body-diagram of an element of length ∆x is shown, with all its forces,
in Fig. 2.5.2(c). Summing the forces in the x- and z-directions and summing

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 74 — #28 ii
ii
ii
74 REVIEW OF EQUATIONS OF SOLID MECHANICS
the moments at the right end of the beam element, we obtain the followingequilibrium equations:∑
Fx = 0 : − dN
dx= f(x), (2.5.3)∑
Fz = 0 : − dV
dx= q(x), (2.5.4)∑
My = 0 : V − dM
dx= 0. (2.5.5)
where N(x) is the net axial force, M(x) is the net bending moment about they-axis, and V (x) is the net transverse shear force [see Fig. 2.5.2(d)] on the beamcross section:
N(x) =
∫Aσxx dA, M(x) =
∫Aσxxz dA, V (x) =
∫Aσxz dA. (2.5.6)
where dA denotes an area element of the cross section (dA = dydz). Theset (N,M, V ) are known as the stress resultants (because they result from thestresses in the beam).
The stresses in the beam can be computed using the linear elastic consti-tutive relation for an isotropic but possibly inhomogeneous material (i.e., thematerial properties may be functions of x and z), we have
σxx(x, z) = E(x, z)εxx(x, z) = E
(du
dx− z d
2w
dx2
),
(2.5.7)σxz(x, z) = 2G(x, z)εxz(x, z) = 0.
Although the transverse shear stress computed using constitutive equation iszero (hence, V = 0), it cannot be zero in a beam because the force equilibrium,Eq. (2.5.4) is violated. This is the inconsistency resulting from the Bernoulli–Euler beam hypothesis. Therefore, to respect the physical requirement of V 6= 0,we do not compute the shear stress from σxz = 2Gεxz; it is computed using theshear force V obtained from the equilibrium condition in Eq. (2.5.5), namely,V = dM/dx.
The stress resultants (N,M) now can be related to the displacements u andw and back to the stress σxx, as discussed next. Using Eq. (2.5.6), we obtain
N(x) =
∫Aσxx dA = Axx
du
dx+Bxx
(−d
2w
dx2
),
(2.5.8)
M(x) =
∫Azσxx dA = Bxx
du
dx+Dxx
(−d
2w
dx2
),
where Axx is the axial stiffness, Bxx is the bending-stretching stiffness, and Dxx
is the bending stiffness
Axx =
∫AE(x, z) dA, Bxx =
∫AzE(x, z) dA, Dxx =
∫Az2E(x, z) dA (2.5.9)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 75 — #29 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 75
When E is a function of x only, Eq. (2.5.9) simplifies to
Axx = E(x)
∫AdA = E(x)A(x), Bxx = E(x)
∫Az dA = 0,
(2.5.10)
Dxx = E(x)
∫Az2 dA = E(x)I(x), I =
∫Az2 dA,
where we have used the fact that the x-axis coincides with the centroidal axis:∫Az dA = 0. (2.5.11)
Then (N,M) of Eq. (2.5.8) reduce to
N(x) = EAdu
dx, M(x) = −EI d
2w
dx2(2.5.12)
Equations (2.5.8) and (2.5.9) can be inverted to express du/dx and d2w/dx2
in terms of N and M . We obtain
du
dx=DxxN −BxxMAxxDxx −B2
xx
, −d2w
dx2=AxxM −BxxNAxxDxx −B2
xx
. (2.5.13)
Substituting these relations for du/dx and −d2w/dx2 into the expression forσxx in Eq. (2.5.7), we obtain
σxx(x, z) =E
AxxDxx −B2xx
[DxxN −BxxM + z (AxxM −BxxN)] . (2.5.14)
When E is not a function of z, we obtain (Axx = EA and Dxx = EI)
du
dx=
N
EA, −d
2w
dx2=M
EI. (2.5.15)
and
σxx =N
A+Mz
I. (2.5.16)
We note that, when E is not a function of z, N is independent of w andM is independent of u. Therefore, Eq. (2.5.3) is independent of Eqs. (2.5.4)and (2.5.5). In that case the axial deformation of members can be determinedby solving Eq. (2.5.3) independent of the bending deformation and vice versa.Also, Eqs. (2.5.4) and (2.5.5) can be combined to read
−d2M
dx2= q(x), (2.5.17)
which can be expressed in terms of the transverse deflection w using the secondequation in Eq. (2.5.15) as
d2
dx2
(EI
d2w
dx2
)= q(x). (2.5.18)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 76 — #30 ii
ii
ii
76 REVIEW OF EQUATIONS OF SOLID MECHANICS
We now return to the computation of shear stress σxz in the Bernoulli–Eulerbeam theory. The shear stress is computed from equilibrium considerations. Forbeams with E = E(x), the expression for σxz is given by (see pages 256–261 ofFenner and Reddy [98] for a derivation),
σxz(x, z) =V (x)Q(z)
I(x)b, Q(z) =
∫ c1
zb(z)zdz, (2.5.19)
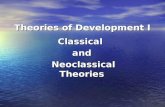
where Q(z) denotes the first moment of the hatched area [see Fig. 2.5.3] aboutthe axis y of the entire cross section, and b is the width of the cross section at zwhere the longitudinal shear stress (σxz) is computed. The hatched area is onlya portion of the total area of cross section that lies below the surface on whichthe shear force acts; Q is the maximum at the centroid (i.e., z = 0), and σxz isthe maximum wherever Q/b is the maximum. For example, for a rectangularcross section beam of height 2h and width b, Q(z) takes the form
Q(z) = b
∫ h
zzdz =
b
2
(h2 − z2
)(2.5.20)
and the shear stress becomes
σxz(x, z) =V (x)Q(z)
I(x)b=
1
2IV (x)
(h2 − z2
). (2.5.21)
Thus, the shear stress varies quadratically through the beam height, vanishingat the top (z = −h) and bottom (z = h). The maximum shear stress isσmaxxz = σxz(x, 0) = 3
4bhV (x). Thus, the actual maximum occurs wherever V isthe maximum.
0M
0F
0q
Figure 2.5.3
z
z
z
yx
b
( )q x
1c
2c
xD σxx( , )x x z+Dσxx( , )x z
xzsxzs
Fig. 2.5.3: Transverse shear stress σxz due to bending.
2.5.3 The Timoshenko Beam Theory
The Timoshenko beam theory is based on a relaxation of the normality condi-tion, namely, Part (c) of the Bernoulli–Euler hypothesis. In other words, thetransverse normal has rotation φx that is not the same as the slope −dw/dx.The difference between these two quantities is the transverse shear strain.
The relaxed Bernoulli–Euler hypothesis leads to the following displacementfield for the Timoshenko beam theory (see Fig. 2.5.4)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 77 — #31 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 77
xf
dwdx
-
dwdx
-
xz xdwdx
g f= +
x
wu
z
Figure 2.5.4
•
•z
Undeformed edge Deformed edge
z
xw u
zxf
xzg
xu zf+
xq
xdwdx
q =-
Fig. 2.5.4: Kinematics of deformation in the Timoshenko beam theory.
u1(x, y, z) = u(x) + zφx, u2 = 0, u3(x, y, z) = w(x), (2.5.22)
where φx is the rotation of a transverse normal line. The infinitesimal strainsare
εxx =∂u1
∂x1=du
dx+ z
dφxdx
, 2εxz =∂u1
∂x3+∂u3
∂x1= φx +
dw
dx(2.5.23)
and all other strains are identically zero.The free-body-diagram of a typical element of the beam remains the same
as depicted in Fig. 2.5.2(c). Therefore, the equilibrium equations given inEqs. (2.5.3)–(2.5.5) are also valid for the Timoshenko beam theory, except thatthe stress resultants (N,M, V ) are related to (u,w, φx) in a different way, asdiscussed in the following paragraphs.
The stresses in the beam are
σxx(x, z) = E(x, z)εxx(x, z) = E
(du
dx+ z
dφxdx
),
(2.5.24)
σxz(x, z) = 2G(x, z)εxz(x, z) = G(x, z)
(φx +
dw
dx
).
Note that the shear strain (hence, shear force) is not zero, removing the incon-sistency of the Bernoulli–Euler beam theory.
The stress resultants (N,M) in the Timoshenko beam theory have the form
N(x) =
∫Aσxx dA = Axx
du
dx+Bxx
(dφxdx
), (2.5.25)
M(x) =
∫Azσxx dA = Bxx
du
dx+Dxx
(dφxdx
), (2.5.26)
V (x) =
∫AKsσxz dA = KsSxz
(φx +
dw
dx
), (2.5.27)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 78 — #32 ii
ii
ii
78 REVIEW OF EQUATIONS OF SOLID MECHANICS
where Ks is the shear correction coefficient introduced to correct the energy lossdue to the constant state4 of transverse shear stress σxz and Sxz is the shearstiffness
Sxz =
∫AG(x, z) dA (2.5.28)
Inverting Eqs. (2.5.25)–(2.5.27), we obtain
du
dx=DxxN −BxxMAxxDxx −B2
xx
,dφxdx
=AxxM −BxxNAxxDxx −B2
xx
, φx +dw
dx=
V
KsSxz.
(2.5.29)Substituting for du/dx, dφx/dx, and φx + dw/dx from Eq. (2.5.29) into theexpressions for σxx and σxz in Eq. (2.5.24), we obtain
σxx(x, z) =E
AxxDxx −B2xx
[DxxN −BxxM + z (AxxM −BxxN)] ,
(2.5.30)
σxz(x, z) =GV
KsSxz.
When E is not a function of z, we obtain (Axx = EA, Bxx = 0, andDxx = EI)
σxx(x, z) =N
A+Mz
I, σxz(x) =
V
KsA. (2.5.31)
and the equations of equilibrium in Eqs. (2.5.3)–(2.5.5) in terms of the gener-alized displacements (u,w, φx) take the form
− d
dx
(EA
du
dx
)= f, (2.5.32)
− d
dx
[KsGA
(dw
dx+ φx
)]= q, (2.5.33)
KsGA
(dw
dx+ φx
)− d
dx
(EI
dφxdx
)= 0. (2.5.34)
As in the case of the Bernoulli–Euler beam theory, the axial deformation ofbeams can be determined by solving Eq. (2.5.32) independent of the bendingequations, Eqs. (2.5.33) and (2.5.34).
Example 2.5.1 illustrates several ideas from this chapter.
Example 2.5.1
Consider the problem of an isotropic cantilever beam of rectangular cross section 2h×b (height2h and width b), bent by an upward transverse load F0 applied at the free end, as shown in
4We note that the shear stress in the Timoshenko beam theory is not a function of z, implyingthat it has a constant value at any section of the beam, violating the condition that it bezero at the top and bottom of the beam.

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 79 — #33 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 79
Fig. 2.5.5. Assume that the beam is isotropic, linearly elastic, and homogeneous. (a) Computethe stresses using Eqs. (2.5.16) and (2.5.19), (b) compute the strains using the uniaxial strain–stress relations, (c) show that the strains computed satisfy the compatibility condition in thex1x3-plane, and (d) determine the two-dimensional displacement field (u1, u2) that satisfiesthe geometric boundary conditions.
Solution: (a) The stresses in the beam are
σ11 =Mx3
I= −F0x1x3
I, σ13 =
V Q
Ib= −F0
2I(h2 − x2
3). (1)
where I is the moment of inertia about the x2 axis, 2h is the height of the beam, and b is thewidth of the beam.
Figure 2.5.5
x1
b
x2
x3
2h
x1
0 1M F x=-
0V F=-
3x
L
0F 0F
Fig. 2.5.5: Cantilever beam bent by a point load, F0.
(b) The strains ε11 and ε13 are known from this section (except for a change of coordinatesfrom Xi to xi); ε11 is the same from the Bernoulli–Euler or the Timoshenko beam theory, andwe use the shear strain obtained from the equilibrium conditions:
ε11 =σ11
E=M(x1)x3
EI= −F0x1x3
EI,
ε13 =σ13
2G=
V Q
2IbG= − (1 + ν)F0
2EI(h2 − x2
3), (2)
ε22 = ε33 = −νε11 =νF0x1x3
EI,
where ν is the Poisson ratio, E is Young’s modulus, and G is the shear modulus.
(c) Next, we determine if the strains computed are compatible. Substituting εij into the thirdequation in Eq. (2.3.17), we obtain 0 + 0 = 0. Thus, the strains satisfy the compatibilityequations in two dimensions (i.e., in the x1x3-plane). Although the two-dimensional strainsare compatible, the three-dimensional strains are not compatible. For example, using theadditional strains, ε33 = ε22 = −νε11 and ε12 = ε23 = 0, one can show that all of the equationsexcept the fifth equation in Eq. (2.3.17) are satisfied. We shall seek the two-dimensionaldisplacement field (u1, u3) associated with the x1x3-plane.
(d) Integrating the strain-displacement equations, we obtain
∂u1
∂x1= ε11 = −F0x1x3
EIor u1 = −F0x
21x3
2EI+ f(x3), (3)
∂u3
∂x3= ε33 =
νF0x1x3
EIor u3 =
νF0x1x23
2EI+ g(x1), (4)
where f(x3) and g(x1) are functions of integration. Substituting u1 and u3 into the definitionof 2ε13, we obtain
2ε13 =∂u1
∂x3+∂u3
∂x1= −F0x
21
2EI+
df
dx3+νF0x
23
2EI+
dg
dx1. (5)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 80 — #34 ii
ii
ii
80 REVIEW OF EQUATIONS OF SOLID MECHANICS
But this must be equal to the shear strain known from Eq. (2):
− F0
2EIx2
1 +df
dx3+νF0
2EIx2
3 +dg
dx1= − (1 + ν)
EIF0(h2 − x2
3). (6)
Separating the terms that depend only on x1 and those depend only on x3 (the constant termcan go with either one), we obtain
− dg
dx1+
F0
2EIx2
1 −(1 + ν)F0h
2
EI=
df
dx3− (2 + ν)F0
2EIx2
3. (7)
Since the left side depends only on x1 and the right side depends only on x3, and yet theequality must hold, it follows that both sides should be equal to a constant, say c0:
df
dx3− (2 + ν)F0
2EIx2
3 = c0, − dg
dx1+
F0
2EIx2
1 −(1 + ν)F0h
2
EI= c0.
Integrating the expressions for f and g, we obtain
f(x3) =(2 + ν)F0
6EIx3
3 + c0x3 + c1,
g(x1) =F0
6EIx3
1 −(1 + ν)F0h
2
EIx1 − c0x1 + c2,
(8)
where c1 and c2 are constants of integration. Thus, the most general form of displacementfield (u1, u3) that corresponds to the strains in Eq. (2) is given by
u1(x1, x3) = − F0
2EIx2
1x3 +(2 + ν)F0
6EIx3
3 + c0x3 + c1,
u3(x1, x3) = − (1 + ν)F0h2
EIx1 +
νF0
2EIx1x
23 +
F0
6EIx3
1 − c0x1 + c2.
(9)
The constants c0, c1, and c2 are determined using suitable boundary conditions. Weimpose the following boundary conditions that eliminate rigid-body displacements (that is,rigid-body translation and rigid-body rotation):
u1(L, 0) = 0, u3(L, 0) = 0, Ω13
∣∣∣x1=L,x3=0
=1
2
(∂u3
∂x1− ∂u1
∂x3
)x1=L,x3=0
= 0. (10)
Imposing the boundary conditions from Eq. (10) on the displacement field in Eq. (9), weobtain
u1(L, 0) = 0 ⇒ c1 = 0,
u3(L, 0) = 0 ⇒ c0L− c2 = − (1 + ν)F0h2L
EI+F0L
3
6EI,(∂u3
∂x1− ∂u1
∂x3
)x1=L,x3=0
= 0, ⇒ c0 =F0L
2
2EI− (1 + ν)F0h
2
2EI
(11)
Thus, we have
c0 =F0L
2
2EI− (1 + ν)F0h
2
2EI, c1 = 0, c2 =
F0L3
3EI+
(1 + ν)F0h2L
2EI. (12)
Then the final displacement field in Eq. (9) becomes
u1(x1, x3) =F0L
2x3
6EI
[3
(1− x2
1
L2
)+ (2 + ν)
x23
L2− 3(1 + ν)
h2
L2
],
u3(x1, x3) =F0L
3
6EI
[2− 3
x1
L
(1− ν x
23
L2
)+x3
1
L3+ 3(1 + ν)
h2
L2
(1− x1
L
)].
(13)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 81 — #35 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 81
In the Euler–Bernoulli beam theory (EBT), where one assumes that L >> 2h and ν = 0,we have u1 = 0, and u3 is given by
uEBT3 (x1, x3) =
F0L3
6EI
(2− 3
x1
L+x3
1
L3
), (14)
while in the Timoshenko beam theory (TBT) we have u1 = 0 [E = 2(1 + ν)G, I = Ah2/3,and A = 2bh], and u3 is given by
uTBT3 (x1, x3) =
F0L3
6EI
(2− 3
x1
L+x3
1
L3
)+
F0L
KsGA
(1− x1
L
). (15)
Here Ks denotes the shear correction factor. Thus, the Timoshenko beam theory with shearcorrection factor of Ks = 4/3 predicts the same maximum deflection, u3(0, 0), as the two-dimensional elasticity theory. Both beam theory solutions, in general, are in error comparedto the plane elasticity solution (primarily because of the Poisson effect).
2.5.4 The von Karman Theory of Beams
2.5.4.1 Preliminary discussion
In the preceding sections on beam theories, we made an assumption of infinites-imal strains to write the linear strain–displacement relations [see Eqs. (2.5.2)and (2.5.23)]. When one assumes the strain are small but the rotation of thetransverse normal line is moderate, the strain fields of the Bernoulli–Euler andTimoshenko beam theories will have additional term, which is nonlinear in thetransverse deflection w, in the extensional part of the strain. The nonlinearstrain is often referred to as the von Karman strain. To see how this nonlin-ear term enters the calculation, we first make certain assumptions concerningthe magnitude of the various terms in the Green strain tensor components andcompute the nonzero strains for beams.
We begin with the assumption that the axial strain (du1/dx) and the cur-vature (d2w/dx2) are of order ε, and (dw/dx) is of order
√ε, where ε << 1
is a small parameter. Then the nonzero Green strain tensor components fromEq. (2.3.11) are (with Xi ≈ xi)
εxx =∂u1
∂x1+
1
2
(∂u3
∂x1
)2
, (2.5.35)
εxz =1
2
(∂u1
∂x3+∂u3
∂x1
). (2.5.36)
Thus, the underlined term in Eq. (2.5.35) is new and it is nonlinear. The beamtheory resulting from the inclusion of this nonlinear term is termed the vonKarman beam theory. Here we present the complete development for each ofthe beam theories considered before.
Before we embark on the development of the beam theories, we must con-sider suitable equations of equilibrium for this nonlinear case. We adopt the

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 82 — #36 ii
ii
ii
82 REVIEW OF EQUATIONS OF SOLID MECHANICS
equations of equilibrium in terms of the second Piola–Kirchhoff stress tensor S.The vector equation of equilibrium in terms of S is [see Eqs. (2.2.14), (2.2.9),and (2.3.7)]
∇0 ·[ST · (I + ∇0u)
]+ ρ0f = 0,
which in component form is
∂
∂XJ
[(δKI +
∂uI∂XK
)SKJ
]+ ρ0fI = 0, (2.5.37)
where fI are body forces measured per unit mass. In the present case, theequilibrium equations associated with balance of forces in the x- and z-directionsare
∂
∂x
(Sxx +
∂u1
∂xSxx +
∂u1
∂zSxz
)+
∂
∂z
(Sxz +
∂u1
∂xSxz
)+ fx = 0, (2.5.38)
∂
∂x
(Sxz +
∂u3
∂xSxx
)+
∂
∂z
(∂u3
∂xSxz
)+ fz = 0, (2.5.39)
where fx = ρ0f1 and fz = ρ0f3 are the body forces measured per unit volume.They are assumed, in the present case, to be only functions of x.
2.5.4.2 The Bernoulli–Euler beam theory
The displacement field of the Bernoulli–Euler beam theory is given in Eq. (2.5.1).Integration of Eqs. (2.5.38) and (2.5.39) over the beam area of cross sectionyields
d
dx
(N +
du
dxN − d2w
dx2M − dw
dxV
)− d2w
dx2V + f = 0, (2.5.40)
d
dx
(V +
dw
dxN
)+ q = 0, (2.5.41)
where f and q are the axially and transversely distributed forces per unit length.We note that∫
Az∂
∂z
(Sxz +
∂u1
∂xSxz
)dA = −
∫A
(Sxz +
∂u1
∂xSxz
)dA, (2.5.42)
where we have used the assumption that Sxz = 0 on the surface of the beam.Next, multiply Eq. (2.5.38) with z, integrate over the beam area of cross section,and use the identity in Eq. (2.5.42) to obtain
d
dx
(M +
du
dxM − d2w
dx2Px −
dw
dxRx
)− V − du
dxV +
d2w
dx2Rx = 0, (2.5.43)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 83 — #37 ii
ii
ii
2.5. THEORIES OF STRAIGHT BEAMS 83
where (Px, Rx) are higher-order stress resultants
Px =
∫Aσxxz
2 dA, Rx =
∫Aσxzz dA. (2.5.44)
Note that area integrals of zfx and zfz vanish because fx and fz are onlyfunctions of x and the x-axis coincides with the geometric centroidal axis.
Using the order-of-magnitude assumption of various quantities, Eqs. (2.5.40),(2.5.41), and (2.5.43) can be simplified as
−dNdx
= f, (2.5.45)
−dVdx− d
dx
(dw
dxN
)= q, (2.5.46)
−dMdx
+ V = 0, (2.5.47)
where the underlined expression is the only new term due to the von Karmannonlinearity when compared to Eqs. (2.5.3)–(2.5.5). Of course, the stress re-sultant N will also contain nonlinear term when it is expressed in terms of thedisplacements. Since in the Bernoulli–Euler beam theory V cannot be deter-mined independently, we use V = dM/dx from Eq. (2.5.47) and substitute for Vinto Eq. (2.5.46) the following equations of equilibrium for the Bernoulli–Eulerbeam theory:
−dNdx
= f (2.5.48)
−d2M
dx2− d
dx
(dw
dxN
)= q. (2.5.49)
In view of the displacement field in Eq. (2.5.1), we obtain the followingsimplified Green strain tensor component
Exx ≈ εxx =du
dx− z d
2w
dx2+
1
2
(dw
dx
)2
≡ ε(0)xx + zε(1)
xx , γxz = 0, (2.5.50)
where
ε(0)xx =
du
dx+
1
2
(dw
dx
)2
, ε(1)xx = −d
2w
dx2, (2.5.51)
and the stress resultants (N,M) can be expressed in terms of the displace-ments (u,w) (when linear stress–strain relations are used) as [see Eqs. (2.5.8)and(2.5.9)]
N(x) =
∫Aσxx dA = Axx
[du
dx+
1
2
(dw
dx
)2]
+Bxx
(−d
2w
dx2
), (2.5.52)
M(x) =
∫Azσxx dA = Bxx
[du
dx+
1
2
(dw
dx
)2]
+Dxx
(−d
2w
dx2
). (2.5.53)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 84 — #38 ii
ii
ii
84 REVIEW OF EQUATIONS OF SOLID MECHANICS
Relations in Eq. (2.5.13) take the form
du
dx+
1
2
(dw
dx
)2
=DxxN −BxxMAxxDxx −B2
xx
, −d2w
dx2=AxxM −BxxNAxxDxx −B2
xx
. (2.5.54)
Consequently, Eq. (2.5.14) and (2.5.16) remain unchanged.
2.5.4.3 The Timoshenko beam theory
Using the displacement field in Eq. (2.5.22) and following the procedure as inEqs. (2.5.40)–(2.5.43), we obtain
d
dx
(N +
du
dxN +
dφxdx
M + φxV
)+dφxdx
V + f = 0, (2.5.55)
d
dx
(V +
dw
dxN
)+ q = 0, (2.5.56)
d
dx
(M +
du
dxM +
dφxdx
Px + φxRx
)− V − du
dxV − dφx
dxRx = 0. (2.5.57)
Using the order-of-magnitude assumption of various quantities, Eqs. (2.5.55)–(2.5.57) are simplified to those listed in Eqs. (2.5.45)–(2.5.47).
The simplified Green strain tensor components of the Timoshenko beamtheory are
Exx ≈ εxx =du
dx+ z
dφxdx
+1
2
(dw
dx
)2
≡ ε(0)xx + zε(1)
xx , γxz = φx +dw
dx(2.5.58)
where
ε(0)xx =
du
dx+
1
2
(dw
dx
)2
, ε(1)xx =
dφxdx
. (2.5.59)
The stress resultants (N,M, V ) are known in terms of the generalized displace-ments (u,w, φx) as
N(x) =
∫Aσxx dA = Axx
[du
dx+
1
2
(dw
dx
)2]
+Bxx
(dφxdx
), (2.5.60)
M(x) =
∫Azσxx dA = Bxx
[du
dx+
1
2
(dw
dx
)2]
+Dxx
(dφxdx
), (2.5.61)
V (x) = Ks
∫Aσxz dA = KsSxz
(φx +
dw
dx
). (2.5.62)
Relations in Eq. (2.5.29) take the form
du
dx+
1
2
(dw
dx
)2
=DxxN −BxxMAxxDxx −B2
xx
,
(2.5.63)dφxdx
=AxxM −BxxNAxxDxx −B2
xx
, φx +dw
dx=
V
KsSxz.

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 85 — #39 ii
ii
ii
2.6. SUMMARY 85
Therefore, Eqs. (2.5.30) and (2.5.31) remain unchanged.This completes the development of the Bernoulli–Euler and Timoshenko
beam theories with the von Karman nonlinear strain. The equations governingbars can be obtained as a special case from the equations of beams by settingbending related quantities to zero (i.e., w = 0, φx = 0, M = 0, V = 0, andq = 0). Thus, the kinematic, constitutive, and equilibrium equations of bars(written in terms of forces as well as displacements) are
εxx =du
dx, σxx = Eεxx, N = EA
du
dx(2.5.64)
−dNdx
+ f = 0 ⇒[− d
dx
(EA
du
dx
)+ f = 0
], 0 < x < L
Here u denotes the axial displacement and f is the distributed axial force.The governing equations for cables (also termed rods, ropes, strings, and
so on) in a plane are the same as those for bars, with the exception that axialstiffness EA is replaced with the tension T (x) in the cable. Thus, we have[
− d
dx
(Tdu
dx
)+ f = 0
], 0 < x < L, (2.5.65)
where u is the transverse displacement and f(x) is the distributed force trans-verse to the cable.
2.6 Summary
In this chapter a summary of the equations of elasticity are presented. These in-clude the equations of motion, strain–displacement equations, and constitutive(or stress–strain) relations. The stress and strain transformations and com-patibility conditions for strains are also discussed. Also, two beam theories,namely the Bernoulli–Euler and Timoshenko beam theories, are also fully de-veloped in this chapter. Finally, the von Karman nonlinear beam theories usingthe Bernoulli–Euler and Timoshenko kinematics are developed. The equationsgoverning the two beam theories will be used extensively in the coming chap-ters. The main equations of this chapter for linearized elasticity and bendingof beams are summarized here.
Equations of motion [Eqs. (2.2.7) and (2.2.8)]
∇ · σ + ρf = ρ∂2u
∂t2
(∂σji∂xj
+ ρfi = ρ∂2ui∂t2
). (2.6.1)
Strain–displacement relations [Eq. (2.3.12)]
ε = 12
[(∇u) + (∇u)T
] [εij = 1
2
(∂ui∂xj
+∂uj∂xi
)]. (2.6.2)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 86 — #40 ii
ii
ii
86 REVIEW OF EQUATIONS OF SOLID MECHANICS
Strain compatibility equations [Eqs. (2.3.18) and (2.3.19)]
∇× (∇× ε)T = 0
(∂2εij∂xk∂x`
+∂2εk`∂xi∂xj
=∂2ε`j∂xk∂xi
+∂2εki∂x`∂xj
). (2.6.3)
Stress–strain relations [modified Eqs. (2.4.11) and (2.4.12) to account forthermal strains; see Problem 2.39]
σ = E1+νε+ νE
(1+ν)(1−2ν) tr(ε) I− Eα1−2ν (T − T0) I(
σij = E1+ν εij + νE
(1+ν)(1−2ν) εkk δij −Eα
1−2ν (T − T0)δij
).
(2.6.4)
Equilibrium equations of the Bernoulli–Euler beam theory [Eqs. (2.5.48)and (2.5.49); set the nonlinear terms (underlined) to obtain the linear equations]
−dNdx
= f, −d2M
dx2− d
dx
(dw
dxN
)= q. (2.6.5)
Kinematic relations of the Bernoulli–Euler beam theory [Eq. (2.5.50)]
εxx =du
dx+
1
2
(dw
dx
)2
− z d2w
dx2, γxz = 0. (2.6.6)
Constitutive relations of the homogeneous Bernoulli–Euler beam theory [Eqs. (2.5.52)and (2.5.53)]
N = EA
[du
dx+
1
2
(dw
dx
)2], M = −EI d
2w
dx2. (2.6.7)
Equilibrium equations of the Timoshenko beam theory [Eqs. (2.5.45)–(2.5.47); set the nonlinear terms (underlined) to obtain the linear equations]
−dNdx
= f, −dVdx− d
dx
(dw
dxN
)= q, −dM
dx+ V = 0. (2.6.8)
Kinematic relations of the Timoshenko beam theory [Eqs. (2.5.58) and (2.5.59)]
εxx =du
dx+
1
2
(dw
dx
)2
+ zdφxdx
, γxz = φx +dw
dx. (2.6.9)
Constitutive relations of the homogeneous Timoshenko beam theory [Eqs. (2.5.60)–(2.5.62)]
N = EA
[du
dx+
1
2
(dw
dx
)2], M = EI
dφxdx
, V = GAKs
(φx +
dw
dx
).
(2.6.10)

ii
“EVPM3ed02” — 2016/6/10 — 7:20 — page 87 — #41 ii
ii
ii
2.6. SUMMARY 87
Table 2.6.1 contains a summary of governing equations of homogeneous,isotropic, and linear elastic bodies in terms of displacements (i.e., equilibriumequations, kinematics relations, and constitutive equations are combined to ex-press the governing equations in terms of displacements). The nonlinear equi-librium equations of beams with the von Karman nonlinearity can be expressedin terms of displacements with the help of equations presented in Section 2.5.In the later chapters of this book we shall make reference to the equationsdeveloped in this chapter and summarized in this section. Some of the equa-tions developed here may be re-derived using the energy approach in Chapters3 through 5.
Table 2.6.1: Summary of equations of elasticity, membranes, cables, bars, and beams.
1. Linearized Elasticity (µ and λ are Lame constants, u is the displacement vector, and fis the body force vector measured per unit volume)
µ∇2u + (λ+ µ)∇(∇ · u) + f = 0 in Ω. (2.6.11)
2. Membranes (a11 and a22 are tensions in the x- and y-coordinate directions, respectively,u is the transverse deflection, and f is the distributed transverse force measured per unit area)
− ∂
∂x
(a11
∂u
∂x
)− ∂
∂y
(a22
∂u
∂y
)= f in Ω. (2.6.12)
3. Cables (T is the tension in the cable, u is the transverse deflection, and f is the distributedtransverse load)
− d
dx
(Tdu
dx
)= f, 0 < x < L. (2.6.13)
4. Bars (E is Young’s modulus, A is the area of cross section, u is the axial displacement,and f is the distributed axial force)
− d
dx
(EA
du
dx
)= f, 0 < x < L. (2.6.14)
5. Bernoulli–Euler beam theory (E is Young’s modulus; I is the moment of inertia; w isthe transverse displacement, and q is the distributed load)
d2
dx2
(EI
d2w
dx2
)= q, 0 < x < L (2.6.15)
6. Timoshenko beam theory (E is Young’s modulus, G is the shear modulus, A is thearea of cross section, Ks shear correction coefficients, I is the moment of inertia; w is thetransverse displacement, φx rotation of a transverse normal line, and q is the distributed load)
− d
dx
(EI
dφxdx
)+GAKs
(φx +
dw
dx
)= 0
− d
dx
[GAKs
(φx +
dw
dx
)]= q
(2.6.16)










![jan 2012 · 2017-07-19 · phot 2" x 2.5" photo 2" x 2.5" C) PageMaps photo 2.5" x 2.5" photo 2.5" x 2.5" photo 2.5" x 2.5" photo 2" x 2.5" photo 2.5" x 2.5" C] PageMaps photo 2.5"](https://static.fdocuments.us/doc/165x107/5f4cb42409b5fa18f7093d11/jan-2012-2017-07-19-phot-2-x-25-photo-2-x-25-c-pagemaps.jpg)