24. Product Assurance MAE 342 2016Development of strategy and tactics Phase Process Outcome...
27
2/12/20 1 Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE342.html Product Assurance Space System Design, MAE 342, Princeton University Robert Stengel • Assembly, Integration, and Verification • Dependability • Reliability • Task Planning • Quality Assurance 1 1 Failure Analysis of Cygnus CRS Orb-3 Orbital Sciences Antares 130 • Possible causes – Manufacturing defect in turbopump Aerojet Rocketdyne AJ-130 motor • Refurbished Energomash NK-33 motor from stockpile • Built in 1970s – Design flaw in hydraulic balance assembly and thrust bearings 2 2
Transcript of 24. Product Assurance MAE 342 2016Development of strategy and tactics Phase Process Outcome...
2/12/20
1
Copyright 2016 by Robert Stengel. All rights reserved. For educational use only.http://www.princeton.edu/~stengel/MAE342.html
Product AssuranceSpace System Design, MAE 342, Princeton University
Robert Stengel
• Assembly, Integration, and Verification
• Dependability• Reliability• Task Planning• Quality Assurance
1
1
Failure Analysis of Cygnus CRS Orb-3Orbital Sciences Antares 130
• Possible causes– Manufacturing defect in
turbopump AerojetRocketdyne AJ-130 motor
• Refurbished EnergomashNK-33 motor from stockpile
• Built in 1970s– Design flaw in hydraulic
balance assembly and thrust bearings
2
2
2/12/20
2
Assemble, Integrate, and Verify
• Verify– Demonstrate compliance with goals
• Qualification of design• Acceptance of hardware
– Methods• Test• Analysis• Inspection• Design Review
3
– System Level• Spacecraft• Module or sub-system• Unit• Equipment or component
Fortescue, Ch. 17
• Integrate– Make it function
• Assemble– Build spacecraft
3
Manage Risk
4
4

2/12/20
3
Classify Risk
5http://www.riskbusinessamericas.com/Public.IndustryRiskProfiles.aspx
5
6http://www.riskbusinessamericas.com/Public.IndustryRiskProfiles.aspx
Assess Risk
6
2/12/20
4
Spacecraft Product Assurance• Origins
– Industrial Revolution– Formal quality assurance during WWII
• Evolution– Standards and certification methods borrowed
from USAF, ABMA– See Lecture 24 Course Materials on Blackboard
• Special problems– Extremes of operating conditions– Length of unattended operation– Inaccessibility for maintenance
7Fortescue, Ch. 19
7
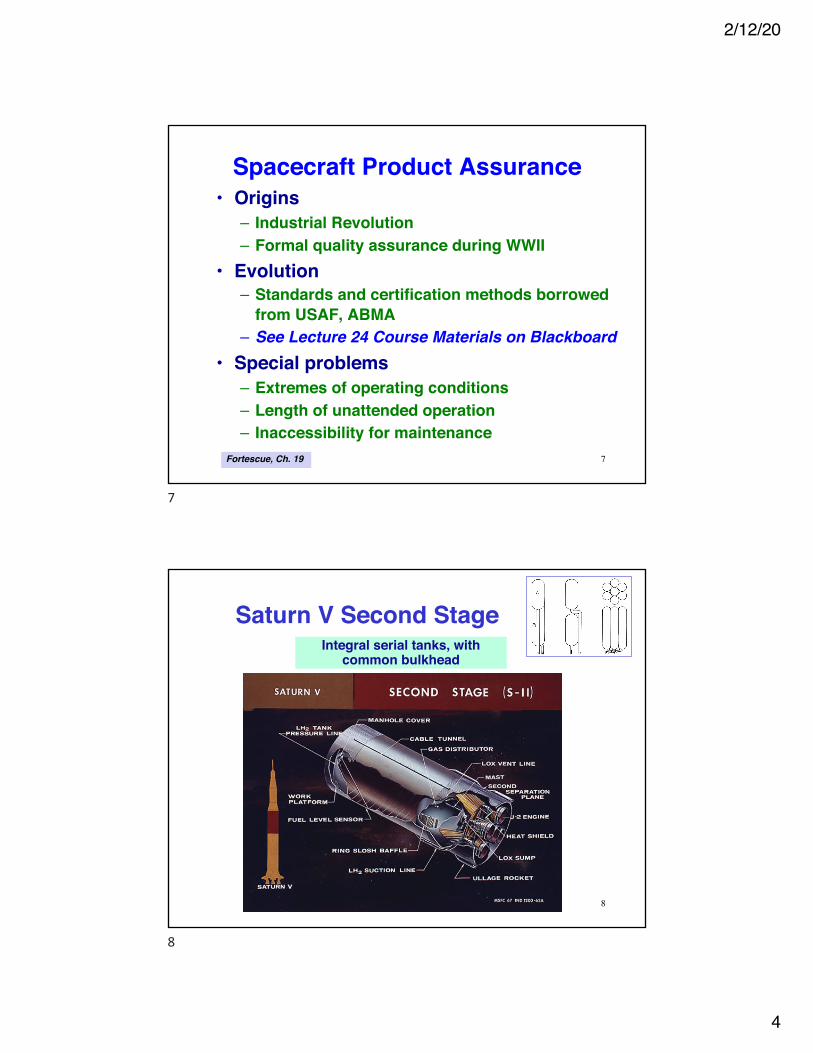
Saturn V Second StageIntegral serial tanks, with
common bulkhead
8
8

2/12/20
5
9
9
Principles and Definitions for Product Assurance
• Quality• Basis for quality assessment• Proof of quality
10Fortescue, Ch. 19
10
2/12/20
6
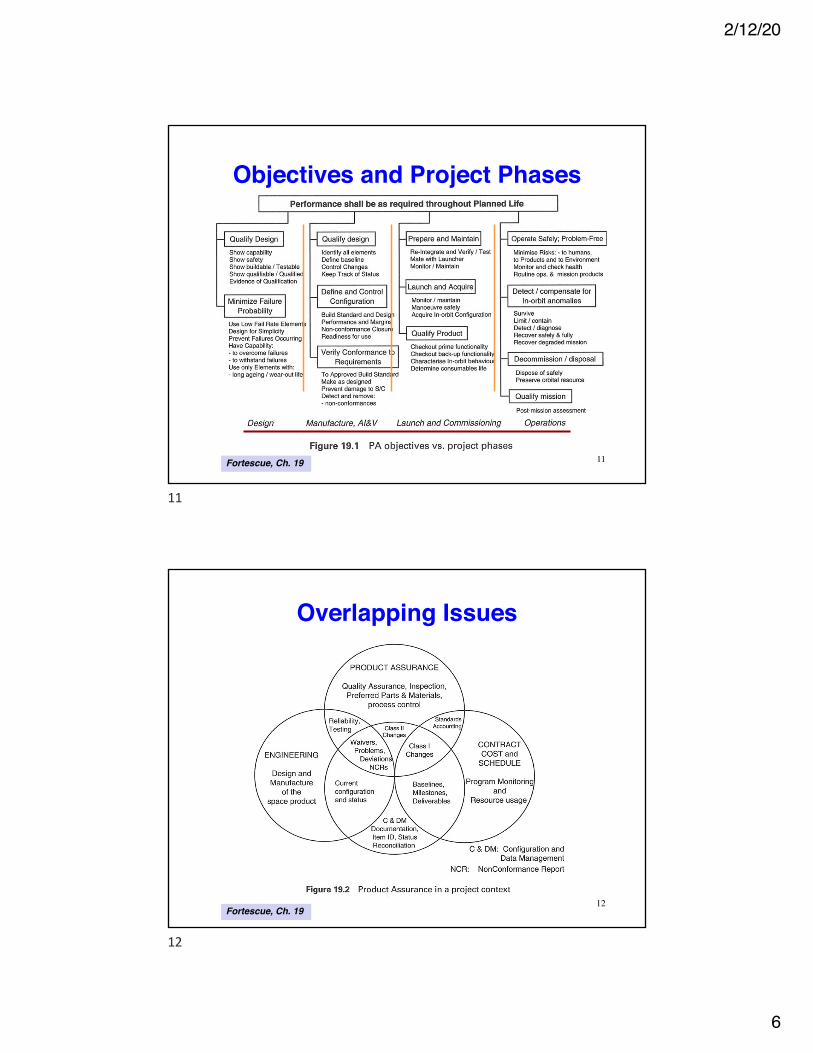
Objectives and Project Phases
11Fortescue, Ch. 19
11
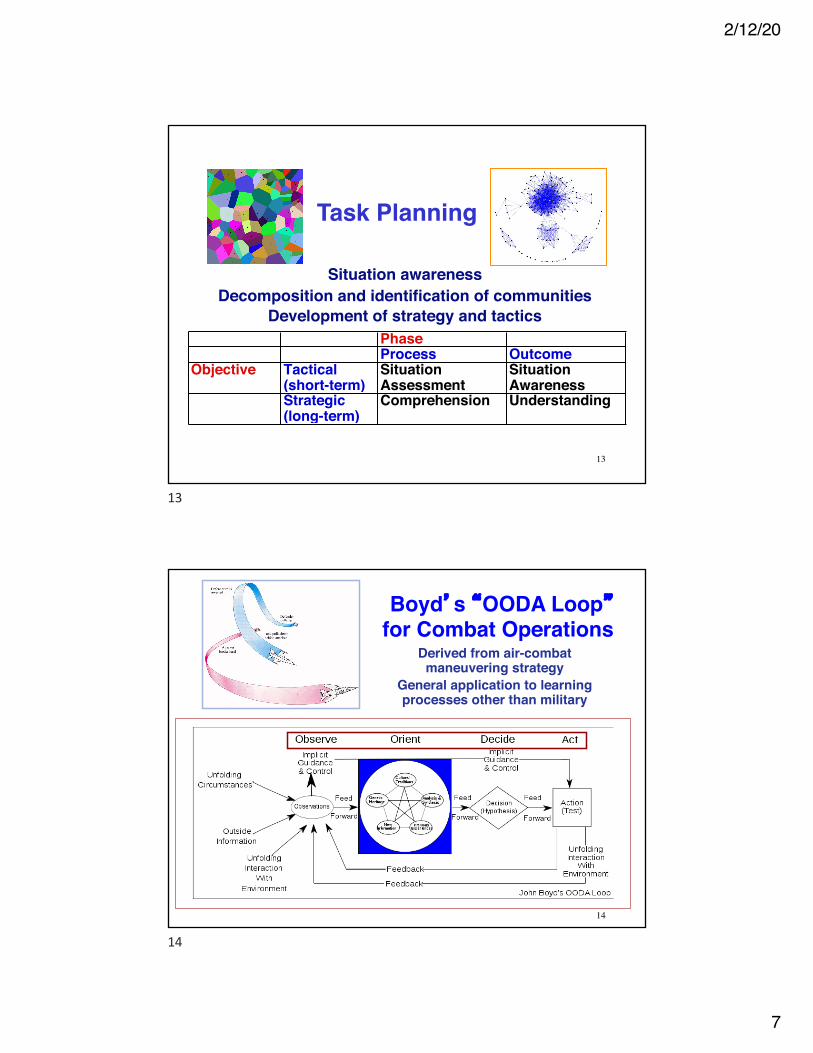
Overlapping Issues
12Fortescue, Ch. 19
12
2/12/20
7
Task Planning
Situation awarenessDecomposition and identification of communities
Development of strategy and tacticsPhaseProcess Outcome
Objective Tactical (short-term)
Situation Assessment
Situation Awareness
Strategic (long-term)
Comprehension Understanding
13
13
Boyd’s “OODA Loop”for Combat Operations
Derived from air-combat maneuvering strategy
General application to learning processes other than military
14
14

2/12/20
8
Endsley, 1995
Elements of Situation Awareness
• Perception• Comprehension• Projection
15
15
Important Dichotomies in Planning
Strength, Weakness, Opportunity, and Threat (SWOT) Analysis “Knok-Knoks” and “Unk-
Unks”
16
16

2/12/20
9
Program Management: Gantt ChartProject schedule
Task breakdown and dependencyStart, interim, and finish elements
Time elapsed, time to go
17
17
Program Evaluation and Review Technique (PERT) Chart
MilestonesPath descriptors
Activities, precursors, and successorsTiming and coordination
Identification of critical pathOptimization and constraint
18
18

2/12/20
10
-ilities• Dependability
– Availability– Maintainability– Security
• Reliability– Qualitative– Quantitative– Design or predicted– Operational
19
19
Parts Procurement• Vendors’ track record• Standardization• Procurement systems
– Organization– Documentation
• Substitution of less reliable equivalents
• Out-of-date/specification parts20
20

2/12/20
11
Materials and Processes
21Fortescue, Ch. 19
21
Materials to Avoid
22Fortescue, Ch. 19
22
2/12/20
12
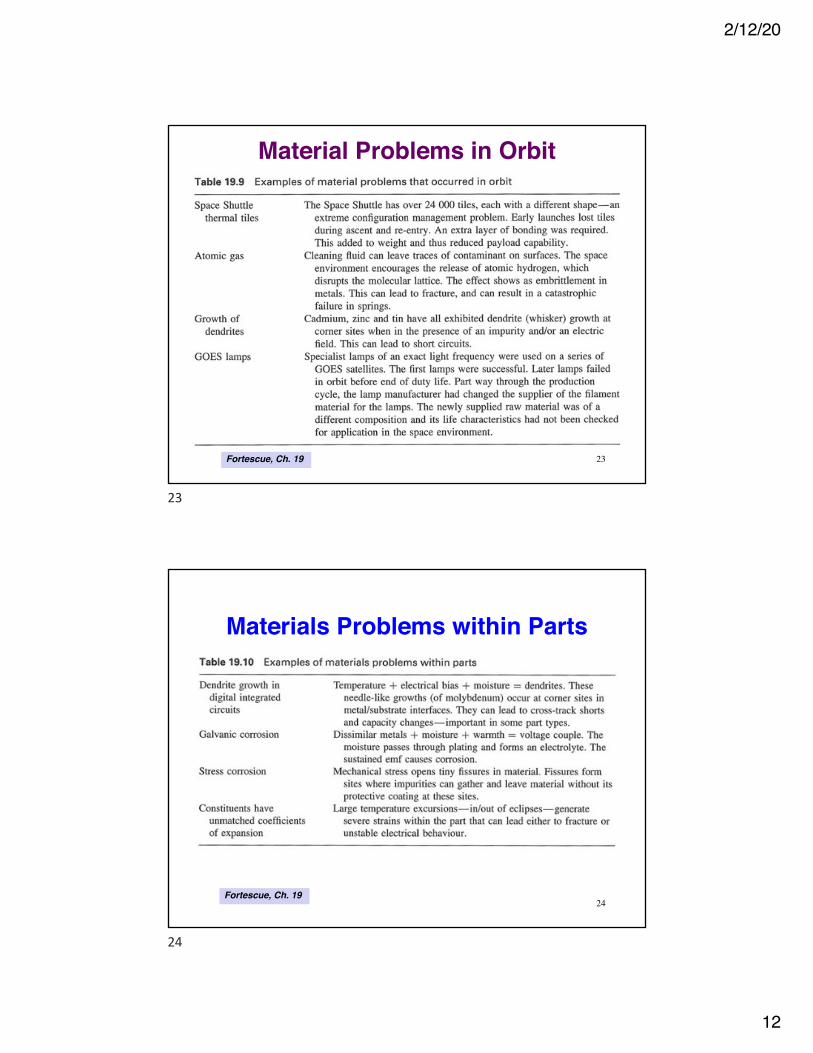
Material Problems in Orbit
23Fortescue, Ch. 19
23
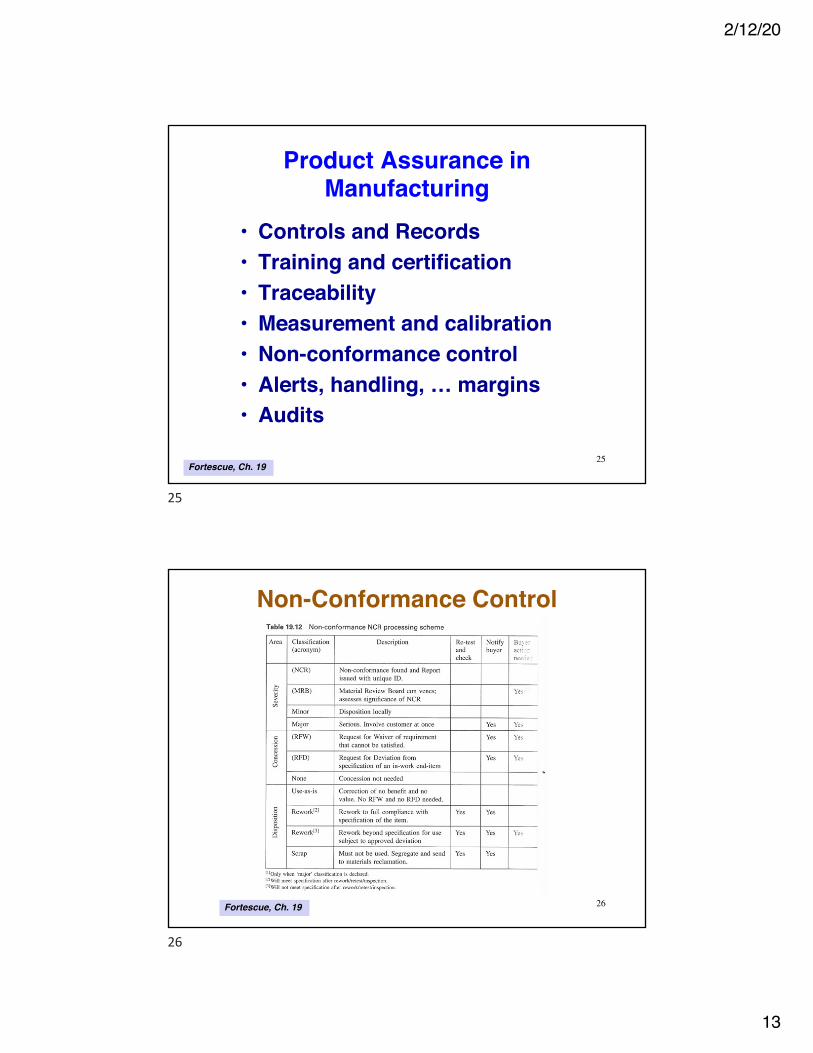
Materials Problems within Parts
24Fortescue, Ch. 19
24
2/12/20
13
Product Assurance in Manufacturing
• Controls and Records• Training and certification• Traceability• Measurement and calibration• Non-conformance control• Alerts, handling, … margins• Audits
25Fortescue, Ch. 19
25
Non-Conformance Control
26Fortescue, Ch. 19
26
2/12/20
14
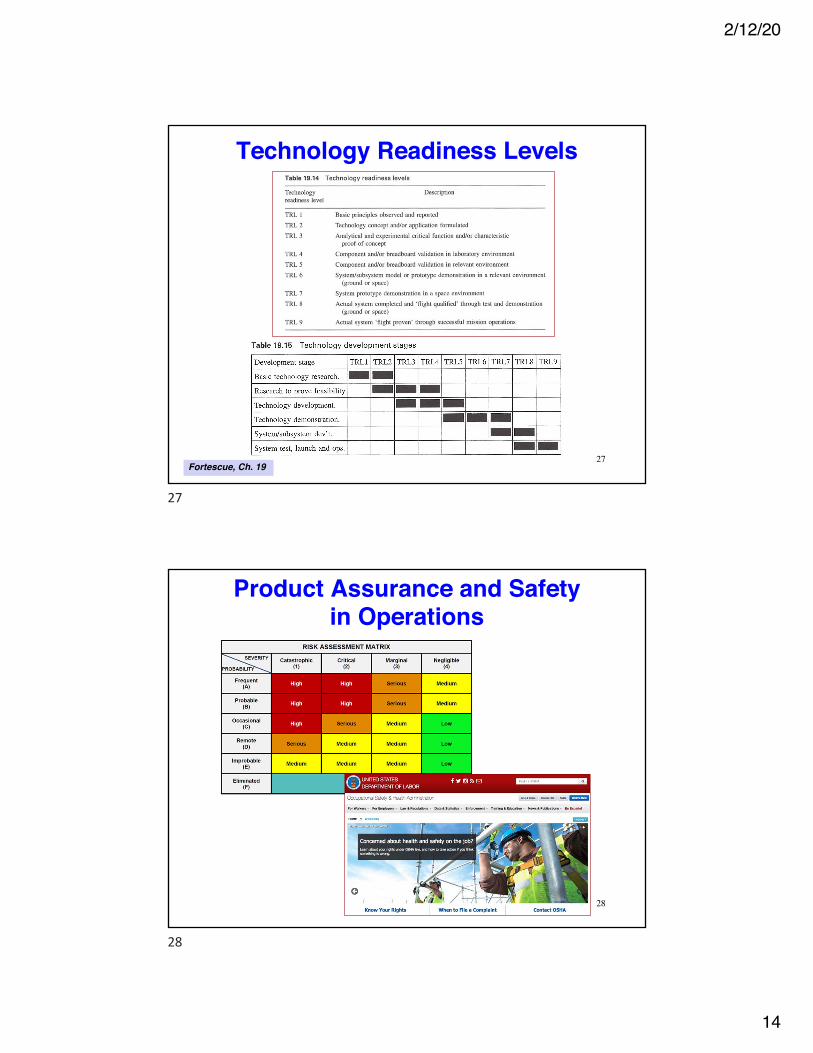
Technology Readiness Levels
27Fortescue, Ch. 19
27
Product Assurance and Safety in Operations
28
28
2/12/20
15
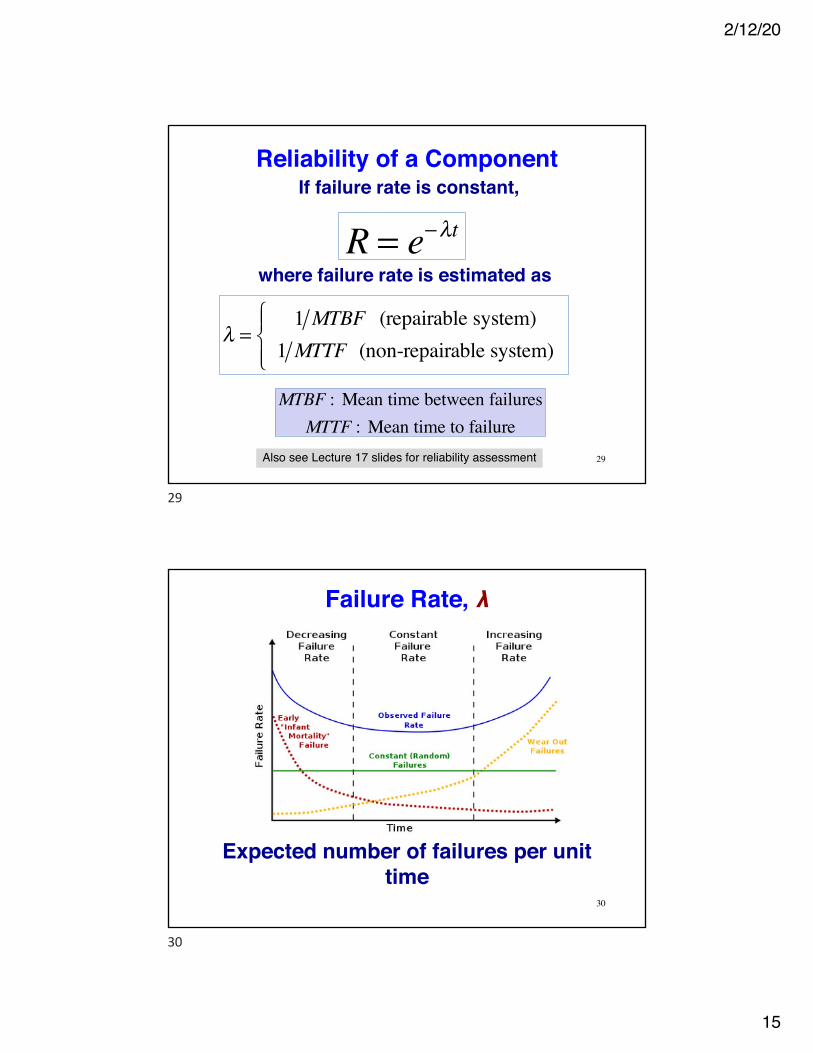
Reliability of a Component
29
R = e−λtIf failure rate is constant,
Also see Lecture 17 slides for reliability assessment
where failure rate is estimated as
λ =1 MTBF (repairable system)
1 MTTF (non-repairable system)
⎧⎨⎪
⎩⎪
MTBF : Mean time between failuresMTTF : Mean time to failure
29
Failure Rate, λ
30
Expected number of failures per unit time
30
2/12/20
16
Reliability Enhancement• Use of redundancy• Design diversity• Limitation of failure effects• De-rating of parts• Radiation screening• Handling/assembly controls• Inspection/testing
31Fortescue, Ch. 19
31
Reliability Analysis Techniques• Failure state probabilities• Worst-case analysis
– https://en.wikipedia.org/wiki/Worst-case_circuit_analysis• Failure modes and effects analysis
– https://en.wikipedia.org/wiki/Failure_mode_and_effects_analysis• Fault tree analysis
– https://en.wikipedia.org/wiki/Fault_tree_analysis• Contingency analysis
– What to do when failure occurs
32Fortescue, Ch. 19
32
2/12/20
17
Probability Distributions
33
33
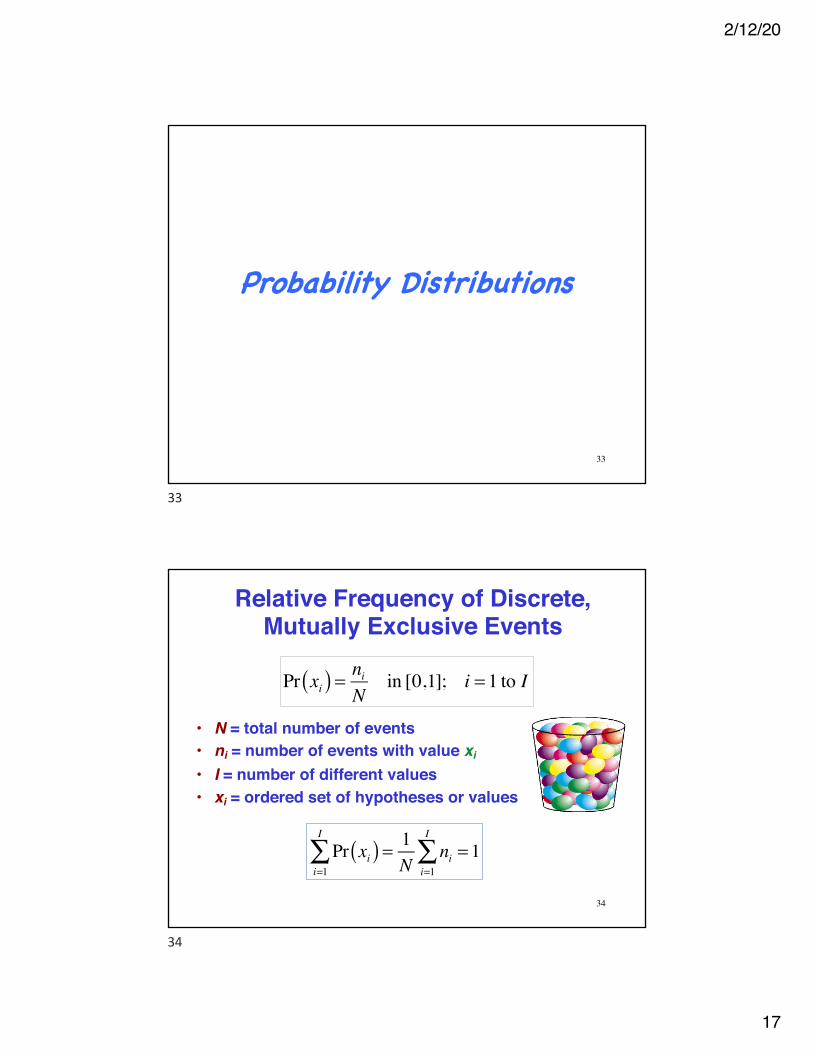
Relative Frequency of Discrete, Mutually Exclusive Events
• N = total number of events• ni = number of events with value xi
• I = number of different values• xi = ordered set of hypotheses or values
Pr xi( ) = niN
in [0,1]; i = 1 to I
34
Pr xi( )i=1
I
∑ = 1N
nii=1
I
∑ = 1
34
2/12/20
18
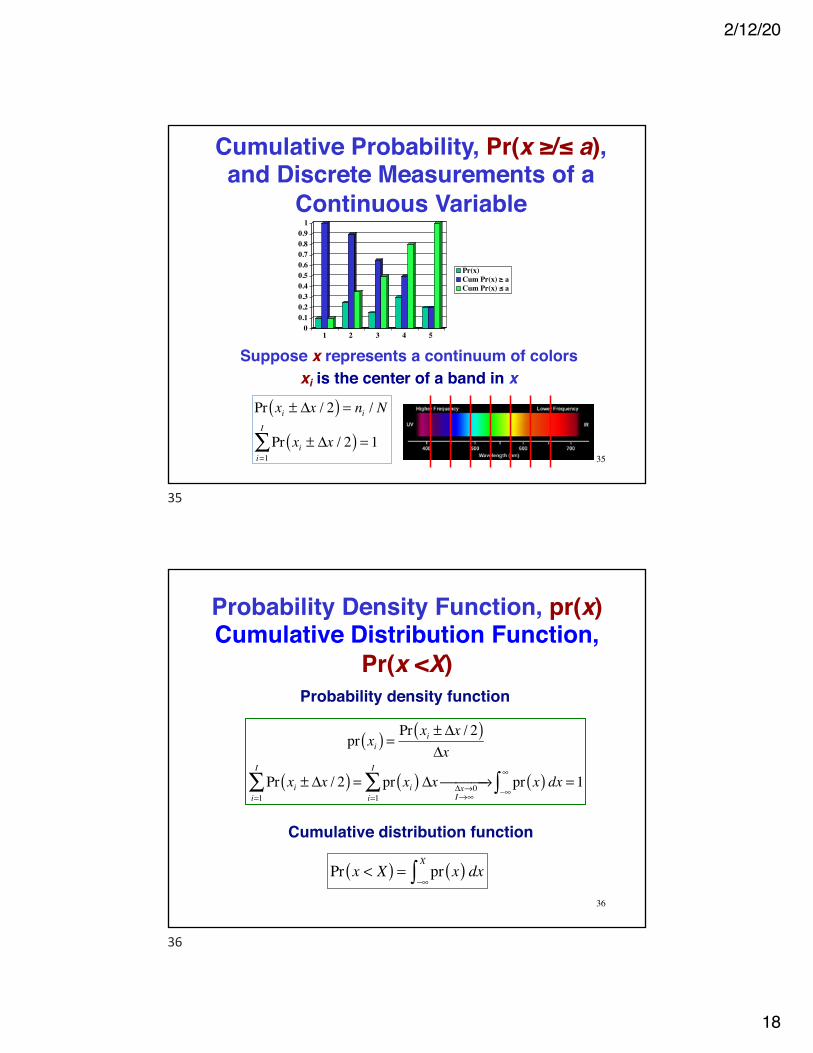
Cumulative Probability, Pr(x ≥/≤ a), and Discrete Measurements of a
Continuous Variable
Suppose x represents a continuum of colorsxi is the center of a band in x
00.10.20.30.40.50.60.70.80.9
1
1 2 3 4 5
Pr(x)Cum Pr(x) ≥ aCum Pr(x) ≤ a
Pr xi ± Δx / 2( ) = ni / N
Pr xi ± Δx / 2( ) = 1i=1
I
∑35
35
Probability Density Function, pr(x)Cumulative Distribution Function,
Pr(x <X)Probability density function
Pr x < X( ) = pr x( ) dx−∞
X
∫
Cumulative distribution function
pr xi( ) = Pr xi ± Δx / 2( )Δx
Pr xi ± Δx / 2( ) = pr xi( ) Δxi=1
I
∑ Δx→0I→∞
⎯ →⎯⎯ pr x( ) dx−∞
∞
∫ = 1i=1
I
∑
36
36

2/12/20
19
Probability Density Function, pr(x) Cumulative Distribution Function,
Pr(x <X)
Pr x < X( ) = pr x( ) dx−∞
X
∫
37
37
Properties of Random Variables
• Mode– Value of x for which pr(x) is maximum
x = E(x) = x pr x( ) dx−∞
∞
∫
• Median– Value of x corresponding to 50th percentile– Pr(x < median) = Pr(x ≥ median) = 0.5
• Mean– Value of x corresponding to statistical average
• First moment of x = Expected value of x
“Moment arm”
“Force”
38
38

2/12/20
20
Expected Values
• Second central moment of x = Variance– Variance from the mean value rather than from zero– Smaller value indicates less uncertainty in the value
of x
σ x2 = E x − x( )2⎡⎣ ⎤⎦ = x − x( )2 pr x( ) dx
−∞
∞
∫
x = E(x) = x pr x( ) dx−∞
∞
∫
• Mean Value is the first moment of x
39
39
Mean Value and Variance of a Uniform Distribution
Variance
If xmin = −xmax ! a
σ x2 = 1
2ax2 dx
−a
a
∫ = x3
6a −a
a
= a2
3 40
pr(x) =
01
xmax − xmin0
;x < xmin
xmin < x < xmaxx > xmax
⎧
⎨⎪⎪
⎩⎪⎪
x = xxmax − xmin( ) dxxmin
xmax∫ = 12xmax + xmin( )
Mean
40
2/12/20
21
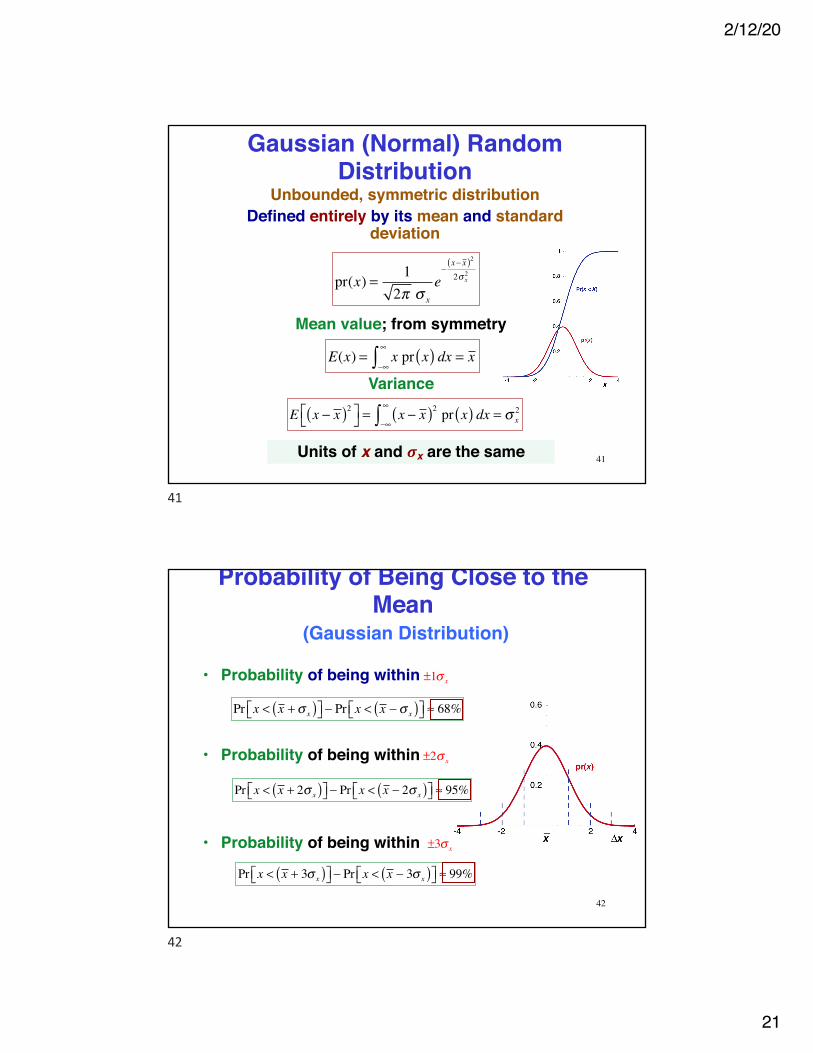
Gaussian (Normal) Random Distribution
pr(x) = 12π σ x
e−x− x( )2
2σ x2
E(x) = x pr x( ) dx−∞
∞
∫ = x
Variance
Units of x and σx are the same
Unbounded, symmetric distributionDefined entirely by its mean and standard
deviation
E x − x( )2⎡⎣ ⎤⎦ = x − x( )2 pr x( ) dx−∞
∞
∫ = σ x2
Mean value; from symmetry
41
41
Probability of Being Close to the Mean
(Gaussian Distribution)
• Probability of being within
Pr x < x +σ x( )⎡⎣ ⎤⎦ − Pr x < x − σ x( )⎡⎣ ⎤⎦ ≈ 68%
• Probability of being within
• Probability of being within
Pr x < x + 2σ x( )⎡⎣ ⎤⎦ − Pr x < x − 2σ x( )⎡⎣ ⎤⎦ ≈ 95%
Pr x < x + 3σ x( )⎡⎣ ⎤⎦ − Pr x < x − 3σ x( )⎡⎣ ⎤⎦ ≈ 99%
±1σ x
±2σ x
±3σ x
42
42
2/12/20
22
Experimental Determination of Mean and Variance
Divisor is (N – 1) rather than N to produce an unbiased estimate
x =xi
i=1
N
∑N
Sample variance for same data set
σ x2 =
xi − x( )2i=1
N
∑N −1( )
Sample mean for N data points, x1, x2, ..., xN
Histogram
43
43
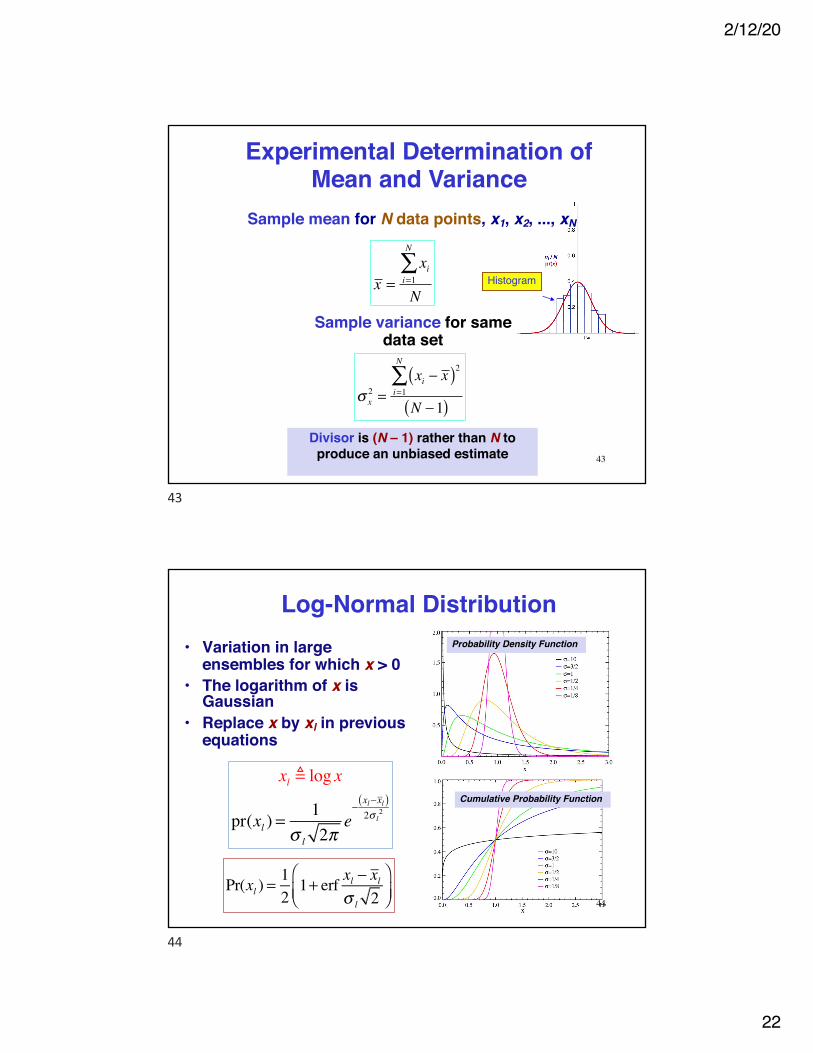
Log-Normal Distribution
xl ! log x
pr(xl ) =1
σ l 2πe−xl−xl( )2σ l
2
• Variation in large ensembles for which x > 0
• The logarithm of x is Gaussian
• Replace x by xl in previous equations
Pr(xl ) =121+ erf xl − xl
σ l 2⎛⎝⎜
⎞⎠⎟
Probability Density Function
Cumulative Probability Function
44
44
2/12/20
23
Weibull Distribution
pr(x) = bθ − xo
⎡
⎣⎢
⎤
⎦⎥x − xoθ − xo
⎡
⎣⎢
⎤
⎦⎥
b−1⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪e−x−xo( )bθ−xo( )b
Pr(x) = 1− e−x−xo( )bθ−xo( )b
• Variation in life characteristics of parts or components
• Variation in large ensembles for which x > 0
Probability Density Function
Cumulative Probability Function
xo : expected minimum valueb : shape or slope parameter (k in figure)
θ : characteristic life or scale parameter (λ in figure)45
45
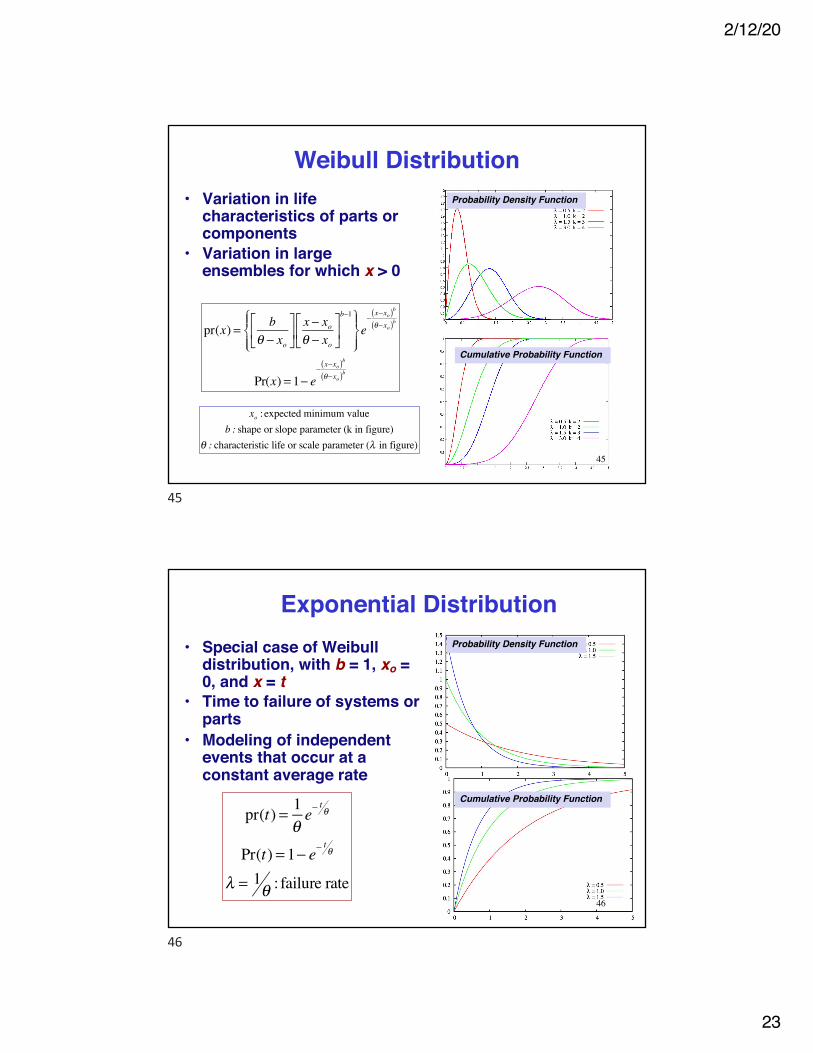
Exponential Distribution
pr(t) = 1θe−
tθ
Pr(t) = 1− e−tθ
λ = 1θ : failure rate
• Special case of Weibulldistribution, with b = 1, xo = 0, and x = t
• Time to failure of systems or parts
• Modeling of independent events that occur at a constant average rate
Probability Density Function
Cumulative Probability Function
46
46

2/12/20
24
Poisson Distribution
pr(r = ri ) =e−λyri
ri !
• Occurrence of isolated, independent events whose average rate is known– Number of events can be
observed– Number of non-events cannot be
observed• Examples:
– Number of machine breakdowns in a plant
– Number of errors in a drawing
Probability Mass Function
Cumulative Probability Function
λ : average number of occurrences47
47
Binomial Distribution
�
pr(r) =nr
⎛
⎝ ⎜ ⎞
⎠ ⎟ prqn−r =
nr
⎛
⎝ ⎜ ⎞
⎠ ⎟ pr 1− p( )n−r
wherenr
⎛
⎝ ⎜ ⎞
⎠ ⎟ = n!
r! n − r( )!n = number of trialsp = probability of successq = probability of failure
• The probability of rsuccessful outcomes in ntrials
• Examples: inspection of parts, probability that a system will operate correctly
Probability Mass Function
Cumulative Probability Function
48
48
2/12/20
25
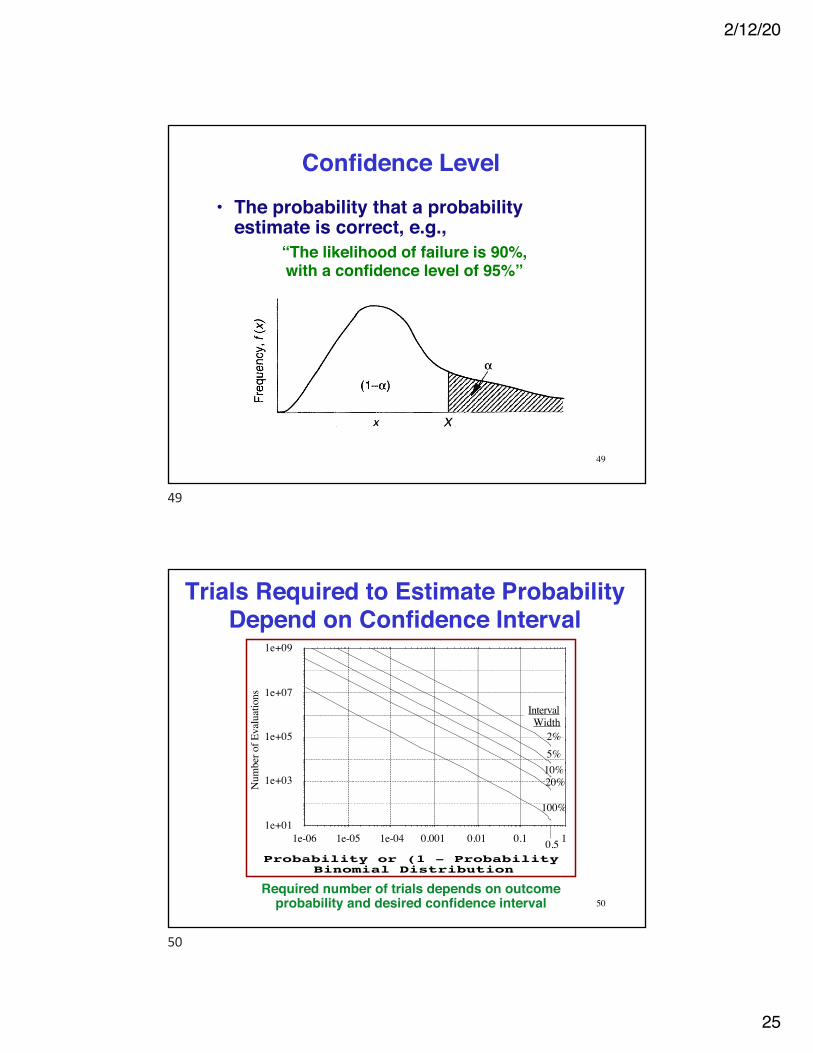
Confidence Level• The probability that a probability
estimate is correct, e.g.,
49
“The likelihood of failure is 90%, with a confidence level of 95%”
49
Trials Required to Estimate Probability Depend on Confidence Interval
1e+01
1e+03
1e+05
1e+07
1e+09
1e-06 1e-05 1e-04 0.001 0.01 0.1 1
2%5%10%20%
100%
Num
ber o
f Eva
luat
ions
0.5
IntervalWidth
Probability or (1 - Probability)Binomial Distribution
Required number of trials depends on outcome probability and desired confidence interval 50
50
2/12/20
26
How Will You Estimate the Likelihood of Success for Project
2020 UA?
51
51
52
MAE 342, Space System Design
52
2/12/20
27
53
53