2013 Lecture3: AR Tracking
85
COSC 426: Augmented Reality Mark Billinghurst [email protected] July 26 th 2013 Lecture 3: AR Tracking
-
Upload
mark-billinghurst -
Category
Technology
-
view
1.486 -
download
0
description
2013 COSC 426 Lecture 3 on AR Tracking. Taught by Mark Billinghurst from the HIT Lab NZ at the University of Canterbury. Taught on July 26th, 2013.
Transcript of 2013 Lecture3: AR Tracking

COSC 426: Augmented Reality
Mark Billinghurst
July 26th 2013
Lecture 3: AR Tracking

Key Points from Lecture 2

“The product is no longer the basis of value. The
experience is.”
Venkat Ramaswamy The Future of Competition.

experiences
services
products
components
Valu
e
Sony CSL © 2004
Gilmore + Pine: Experience Economy
Function
Emotion

Interaction Design is All About You
Users should be involved throughout the Design Process
Consider all the needs of the user

Interaction Design Process

experiences
applications
tools
components
Building Compelling AR Experiences
Tracking, Display
Authoring
Interaction
Usability

Optical see-through head-mounted display
Virtual images from monitors
Real World
Optical Combiners

Video see-through HMD Video cameras
Monitors
Graphics
Combiner
Video

Video Monitor AR
Video cameras Monitor
Graphics Combiner
Video
Stereo glasses

AR Tracking and Registration

Registration Positioning virtual object wrt real world
Tracking Continually locating the users viewpoint
- Position (x,y,z) - Orientation (r,p,y)

Tracking

Tracking Requirements
Augmented Reality Information Display World Stabilized Body Stabilized Head Stabilized
Increasing Tracking Requirements
Head Stabilized Body Stabilized World Stabilized

Tracking Technologies Active
• Mechanical, Magnetic, Ultrasonic • GPS, Wifi, cell location
Passive • Inertial sensors (compass, accelerometer, gyro) • Computer Vision
• Marker based, Natural feature tracking
Hybrid Tracking • Combined sensors (eg Vision + Inertial)

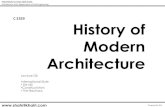
AR Tracking Taxonomy
e.g. AR Toolkit
Low Accuracy at 15-60 Hz
e.g. IVRD
High Accuracy & High Speed
Hybrid Tracking
Limited Range
e.g. HiBall
Many Fiducials in space/time
but no GPS
Extended Range
Indoor Environment
e.g. WLVA
Not Hybridized GPS or
Camera or Compass
Low Accuracy & Not Robust
e.g. BARS
Hybrid Tracking GPS and
Camera and Compass
High Accuracy & Robust
Outdoor Environment
AR TRACKING

Tracking Types
Magnetic Tracker
Inertial Tracker
Ultrasonic Tracker
Optical Tracker
Marker-Based Tracking
Markerless Tracking
Specialized Tracking
Edge-Based Tracking
Template-Based Tracking
Interest Point Tracking
Mechanical Tracker

Mechanical Tracker Idea: mechanical arms with joint sensors
++: high accuracy, haptic feedback -- : cumbersome, expensive
Microscribe

Magnetic Tracker Idea: difference between a magnetic transmitter
and a receiver
++: 6DOF, robust -- : wired, sensible to metal, noisy, expensive
Flock of Birds (Ascension)

Magnetic Tracking Error

Ultrasonics Tracker Idea: Time of Flight or Phase-Coherence Sound Waves
++: Small, Cheap -- : 3DOF, Line of Sight, Low resolution, Affected
Environment Conditon (pressure, temperature)
Ultrasonic Logitech IS600

Inertial Tracker Idea: measuring linear and angular orientation rates
(accelerometer/gyroscope)
++: no transmitter, cheap, small, high frequency, wireless -- : drift, hysteris only 3DOF
IS300 (Intersense) Wii Remote

Mobile Sensors Inertial compass
Earth’s magnetic field Measures absolute orientation
Accelerometers Measures acceleration about axis Used for tilt, relative rotation Can drift over time

Global Positioning System (GPS)
Created by US in 1978 Currently 29 satellites
Satellites send position + time GPS Receiver positioning
4 satellites need to be visible Differential time of arrival Triangulation
Accuracy 5-30m+, blocked by weather, buildings etc


Problems with GPS Takes time to get satellite fix
Satellites moving around
Earths atmosphere affects signal Assumes consistent speed (the speed of light). Delay depends where you are on Earth Weather effects
Signal reflection Multi-path reflection off buildings
Signal blocking Trees, buildings, mountains
Satellites send out bad data Misreport their own position

Accurate to < 5cm close to base station (22m/100 km) Expensive - $20-40,000 USD

Assisted-GPS (A-GPS) Use external location server to send GPS signal
GPS receivers on cell towers, etc Sends precise satellite position (Ephemeris)
Speeds up GPS Tracking Makes it faster to search for satellites Provides navigation data (don’t decode on phone)
Other benefits Provides support for indoor positioning Can use cheaper GPS hardware Uses less battery power on device

Assisted GPS

Cell Tower Triangulation Calculate phone position
from signal strength < 50 m in cities > 1 km in rural

WiFi Positioning Estimate location by using WiFi access points
Can use know locations of WiFi access points Triangulate through signal strength
Eg. PlaceEngine (www.placeengine.com) Client software for PC and mobiles SDK returns position
Accuracy 5 – 100m (depends on WiFi density)

WiFi Hotspots in New York


Indoor WiFi Location Sensing Indoor Location
Asset, people tracking
Aeroscout http://aeroscout.com/ WiFi + RFID
Ekahau http://www.ekahau.com/ WiFi + LED tracking

Integrated Systems Combine GPS, Cell tower, WiFi signals Skyhook (www.skyhookwireless.com)
Core Engine
Database of known locations 700 million Wi-Fi access points and cellular towers.


Comparative Accuracies Study testing iPhone 3GS cf. low cost GPS A-GPS
8 m error WiFi
74 m error
Cell Tower Positioning 600 m error
Accuracy of iPhone Locations: A Comparison of Assisted GPS, WiFi, and Cellular Positioning
In GIScience on July 15, 2009 at 8:11 pm By Paul A Zandbergen Transactions in GIS, Volume 13 Issue s1, Pages 5 - 25

Optical Tracking

Optical Tracker Idea: Image Processing and Computer Vision Specialized
Infrared, Retro-Reflective, Stereoscopic
Monocular Based Vision Tracking
ART Hi-Ball

Outside-In vs. Inside-Out Tracking

Optical Tracking Technologies
Scalable active trackers InterSense IS-900, 3rd Tech HiBall
Passive optical computer vision Line of sight, may require landmarks Can be brittle. Computer vision is computationally-intensive
3rd Tech, Inc.

HiBall Tracking System (3rd Tech) Inside-Out Tracker
$50K USD
Scalable over large area Fast update (2000Hz) Latency Less than 1 ms.
Accurate Position 0.4mm RMS Orientation 0.02° RMS


Starting simple: Marker tracking Has been done for more than 10 years A square marker provides 4 corners
Enough for pose estimation!
Several open source solutions exist Fairly simple to implement
Standard computer vision methods

Marker Based Tracking: ARToolKit
http://artoolkit.sourceforge.net/

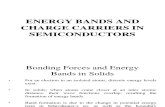
Tracking Range with Pattern Size
Rule of thumb – range = 10 x pattern width

Tracking Error with Range

Tracking Error with Angle

Tracking challenges in ARToolKit
False positives and inter-marker confusion (image by M. Fiala)
Image noise (e.g. poor lens, block coding /
compression, neon tube)
Unfocused camera, motion blur
Dark/unevenly lit scene, vignetting
Jittering (Photoshop illustration)
Occlusion (image by M. Fiala)

Limitations of ARToolKit Partial occlusions cause tracking failure Affected by lighting and shadows Tracking range depends on marker size Performance depends on number of markers
cf artTag, ARToolKitPlus Pose accuracy depends on distance to marker Pose accuracy depends on angle to marker

Tracking, Tracking, Tracking

Other Marker Tracking Libraries arTag
http://www.artag.net/
ARToolKitPlus [Discontinued] http://studierstube.icg.tu-graz.ac.at/handheld_ar/
artoolkitplus.php stbTracker
http://studierstube.icg.tu-graz.ac.at/handheld_ar/stbtracker.php
MXRToolKit http://sourceforge.net/projects/mxrtoolkit/

Markerless Tracking


Markerless Tracking
Magnetic Tracker Inertial Tracker
Ultrasonic Tracker
Optical Tracker
Marker-Based Tracking
Markerless Tracking
Specialized Tracking
Edge-Based Tracking
Template-Based Tracking
Interest Point Tracking
No more Markers! Markerless Tracking

Natural feature tracking Tracking from features of the surrounding
environment Corners, edges, blobs, ...
Generally more difficult than marker tracking Markers are designed for their purpose The natural environment is not…
Less well-established methods Usually much slower than marker tracking

Natural Feature Tracking Use Natural Cues of Real Elements
Edges Surface Texture Interest Points
Model or Model-Free ++: no visual pollution
Contours
Features Points
Surfaces

Texture Tracking

Edge Based Tracking RAPiD [Drummond et al. 02]
Initialization, Control Points, Pose Prediction (Global Method)

Line Based Tracking Visual Servoing [Comport et al. 2004]

Model Based Tracking Track from 3D model Eg OpenTL - www.opentl.org
General purpose library for model based visual tracking

Marker vs. natural feature tracking Marker tracking
+ Can require no image database to be stored + Markers can be an eye-catcher + Tracking is less demanding - The environment must be instrumented with markers - Markers usually work only when fully in view
Natural feature tracking - A database of keypoints must be stored/downloaded + Natural feature targets might catch the attention less + Natural feature targets are potentially everywhere + Natural feature targets work also if partially in view

Hybrid Tracking

Sensor tracking Used by many “AR browsers” GPS, Compass, Accelerometer, (Gyroscope) Not sufficient alone (drift, interference)

Outdoor Hybrid Tracking Combines
computer vision - natural feature tracking
inertial gyroscope sensors Both correct for each other
Inertial gyro - provides frame to frame prediction of camera orientation
Computer vision - correct for gyro drift

Combining Sensors and Vision Sensors
- Produce noisy output (= jittering augmentations) - Are not sufficiently accurate (= wrongly placed augmentations) - Gives us first information on where we are in the world,
and what we are looking at Vision
- Is more accurate (= stable and correct augmentations) - Requires choosing the correct keypoint database to track from - Requires registering our local coordinate frame (online-
generated model) to the global one (world)

Outdoor AR Tracking System
You, Neumann, Azuma outdoor AR system (1999)

Robust Outdoor Tracking
Hybrid Tracking Computer Vision, GPS, inertial
Going Out Reitmayer & Drummond (Univ. Cambridge)

Handheld Display

Registration

Spatial Registration

The Registration Problem Virtual and Real must stay properly aligned If not:
Breaks the illusion that the two coexist Prevents acceptance of many serious applications

Sources of registration errors Static errors
Optical distortions Mechanical misalignments Tracker errors Incorrect viewing parameters
Dynamic errors System delays (largest source of error)
- 1 ms delay = 1/3 mm registration error

Reducing static errors Distortion compensation Manual adjustments View-based or direct measurements Camera calibration (video)

View Based Calibration (Azuma 94)

Dynamic errors
Total Delay = 50 + 2 + 33 + 17 = 102 ms 1 ms delay = 1/3 mm = 33mm error
Tracking Calculate Viewpoint Simulation
Render Scene
Draw to Display
x,y,z r,p,y
Application Loop
20 Hz = 50ms 500 Hz = 2ms 30 Hz = 33ms 60 Hz = 17ms

Reducing dynamic errors (1)
Reduce system lag Faster components/system modules
Reduce apparent lag Image deflection Image warping

Reducing System Lag
Tracking Calculate Viewpoint Simulation
Render Scene
Draw to Display
x,y,z r,p,y
Application Loop
Faster Tracker Faster CPU Faster GPU Faster Display

Reducing Apparent Lag
Tracking Update
x,y,z r,p,y
Virtual Display
Physical Display
(640x480)
1280 x 960
Last known position
Virtual Display
Physical Display
(640x480)
1280 x 960
Latest position
Tracking Calculate Viewpoint Simulation
Render Scene
Draw to Display
x,y,z r,p,y
Application Loop

Reducing dynamic errors (2) Match input streams (video)
Delay video of real world to match system lag
Predictive Tracking Inertial sensors helpful
Azuma / Bishop 1994

Predictive Tracking
Time
Position
Past Future
Can predict up to 80 ms in future (Holloway)
Now

Predictive Tracking (Azuma 94)

Wrap-up Tracking and Registration are key problems Registration error
Measures against static error Measures against dynamic error
AR typically requires multiple tracking technologies Research Areas: Hybrid Markerless Techniques,
Deformable Surface, Mobile, Outdoors

Project List Mobile
Hybrid Tracking for Outdoor AR City Scale AR Visualization Outdoor AR Authoring Tool Outdoor AR collaborative game AR interaction for Google Glass
Non-Mobile AR Face Painting AR Authoring Tool Tangible AR puppeteer studio Gesture based interaction with AR content