200510289.pdf

of 133
Transcript of 200510289.pdf
-
7/28/2019 200510289.pdf
1/133
Numerical Simulation of Pulse-TubeRefrigerators
Irina Lyulina
-
7/28/2019 200510289.pdf
2/133
Copyright c 2004 by Irina Lyulina, Eindhoven, The Netherlands.
All rights are reserved. No part of this publication may be reproduced, stored in aretrieval system, or transmitted, in any form or by any means, electronic, mechanical,photocopying, recording or otherwise, without prior permission of the author.
Printed by Eindhoven University Press
Cover design: JWL Producties
CIP-DATA LIBRARY TECHNISCHE UNIVERSITEIT EINDHOVEN
Lyulina, Irina
Numerical Simulation of Pulse-Tube Refrigerators by Irina Lyulina. -Eindhoven : Technische Universiteit Eindhoven, 2004. Proefschrift. -ISBN 90-386-0982-5
NUR 919Subject headings: nonlinear partial differential equations, numerical simulation, com-putational uid dynamics, compressible ow, cryogenics2000 Mathematics Subject Classication: 65M06,81T80,76MXX
-
7/28/2019 200510289.pdf
3/133
Numerical Simulation of Pulse-TubeRefrigerators
PROEFSCHRIFT
ter verkrijging van de graad van doctor aan deTechnische Universiteit Eindhoven, op gezag van deRector Magnicus, prof.dr. R.A. van Santen, voor een
commissie aangewezen door het College
voor Promoties in het openbaar te verdedigenop woensdag 19 januari 2005 om 16.00 uur
door
Irina Lyulina
geboren te St. Petersburg, Rusland
-
7/28/2019 200510289.pdf
4/133
Dit proefschrift is goedgekeurd door de promotoren:
prof.dr. R.M.M. Mattheijenprof.dr. A.T.A.M. de Waele
Copromotor:dr.ir. A.S. Tijsseling
-
7/28/2019 200510289.pdf
5/133
Contents
1 Introduction 11.1 Pulse-tube refrigerators: history and applications . . . . . . . . 11.2 Different modelling approaches . . . . . . . . . . . . . . 31.3 Our objectives . . . . . . . . . . . . . . . . . . . . . 51.4 Outline of the thesis . . . . . . . . . . . . . . . . . . . 6
2 Modelling 92.1 Physical model. . . . . . . . . . . . . . . . . . . . . 92.2 Mathematical model. . . . . . . . . . . . . . . . . . . 122.3 One-dimensional formulation . . . . . . . . . . . . . . . 13
2.3.1 Governing equations . . . . . . . . . . . . . . . . 132.3.2 Low-Mach-number approximation . . . . . . . . . . . 182.3.3 Boundary and initial conditions . . . . . . . . . . . . 202.3.4 Two-dimensional corrections to the one-dimensional model . . 23
2.4 Two-dimensional formulation . . . . . . . . . . . . . . . 242.4.1 Governing equations . . . . . . . . . . . . . . . . 242.4.2 Low-Mach-number approximation . . . . . . . . . . . 262.4.3 Wall model . . . . . . . . . . . . . . . . . . . . 292.4.4 Boundary and initial conditions . . . . . . . . . . . . 30
3 Numerical solution methods for 1D equations 333.1 Velocity and temperature computation . . . . . . . . . . . . 333.2 Pressure correction algorithms for the 1D case . . . . . . . . . 37
3.2.1 A model problem . . . . . . . . . . . . . . . . . 383.2.2 Pulse tube ow . . . . . . . . . . . . . . . . . . 49
3.3 Local grid renement . . . . . . . . . . . . . . . . . . 51
3.3.1 A model problem . . . . . . . . . . . . . . . . . 523.3.2 Two-grid LUGR with xed renement area . . . . . . . . 533.3.3 Two-grid LUGR with moving renement area . . . . . . . 55
4 Numerical solution methods for 2D equations 57
v
-
7/28/2019 200510289.pdf
6/133
vi Contents
4.1 Temperature computation for the 2D case . . . . . . . . . . . 574.2 Pressure correction algorithm for the 2D case . . . . . . . . . . 634.3 Numerical examples. . . . . . . . . . . . . . . . . . . 67
4.3.1 Hagen-Poiseuille ow in a circular pipe . . . . . . . . . 674.3.2 Starting ow in a circular pipe . . . . . . . . . . . . . 704.3.3 Flow due to an oscillating pressure gradient . . . . . . . . 704.3.4 Flow over a backward-facing step . . . . . . . . . . . 744.3.5 Temperature distribution in fully developed pipe ow . . . . 76
5 Flow and heat transfer computations for the pulse tube 815.1 One-dimensional results . . . . . . . . . . . . . . . . . 81
5.1.1 Velocity . . . . . . . . . . . . . . . . . . . . . 825.1.2 Temperature dynamics . . . . . . . . . . . . . . . 825.1.3 Mass ow and enthalpy ow . . . . . . . . . . . . . 88
5.2 Two-dimensional results . . . . . . . . . . . . . . . . . 925.2.1 Temperature and ow computations . . . . . . . . . . 925.2.2 Fluid-wall interaction . . . . . . . . . . . . . . . . 96
6 Concluding remarks and future work 103
Appendix A. Parameters for a typical single-inlet pulse-tube refrigerator 105
Bibliography 107
Nomenclature 115
Index 119
Summary 121
Samenvatting 123
Acknowledgements 125
Curriculum Vitae 127
vi
-
7/28/2019 200510289.pdf
7/133
CHAPTER 1
Introduction
1.1 Pulse-tube refrigerators: history and applicationsThe pulse tube is a relatively new type of refrigerator. It was introduced in 1964 by
Gifford and Longworth [20]. Their machine worked by the cyclic compression andexpansion of helium gas in a half-open tube. Due to the heat exchange between gas,tube walls and two heat exchangers a temperature difference arose over the tube. Intheir rst report a cold end temperature of 150 K was achieved. At that time the pulsetube was abandoned as a useful cooler because of its inefciency. The performanceof these devices, today known as basic pulse tubes, was limited, typically reachingtemperatures of about 120 K.
A signicant improvement was made in 1984 by Mikulinet al. [51], who introducedthe orice pulse tube. They modied the half-open tube by connecting an orice and
a reservoir to the hot end. Due to this modication the performance of the pulsetube increased and for the rst time it became comparable to the performance of practical coolers (Stirling cycle, Gifford-McMahon and Joule-Thomson cryocoolers).In 1986 Radebaughet al. [56] reached 60 K with an orice pulse tube. Since then theimprovement in efciencyand in performance went fast. In 1990 Zhuet al. [95]addeda bypass with second orice to the device and introduced the double-inlet pulse-tuberefrigerator. In 1994 Matsubara [48] used this technique to reach temperatures below4 K. By the end of the 1990s, temperatures below 2 K with a three-stage pulse tubeand with 3 He as working uid had been reached [90].
Two major classes of pulse-tube refrigerators are currently under development.The rst class, known as low frequency or G-M style pulse tube, is a variantof the Gifford-McMahon cryocooler. G-M style pulse-tube coolers operate at low fre-
quencies, typically less than 5 Hz, and at high pressure ratios up to 5:1. They use aconventional oil-ooded G-M compressor and a valve located near the cold end toconvert the ow of helium from the compressor to a low frequency pressure varia-tion.
The second class of pulse-tube refrigerators is known as high frequency or Stir-
1
-
7/28/2019 200510289.pdf
8/133
2 Introduction
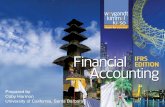
Figure 1.1: Pulse-tube refrigerator (Stirling Cryogenics & Refrigeration B.V.) Mainparts of the system are a regenerator, a cold heat exchanger (CHX), a tubeand a hot heat exchanger (HHX).
ling type pulse tube. These cryocoolers operate at much higher frequencies (20 to 80Hz) and much lower pressure ratios 1.4:1, than G-M style pulse tubes. Stirling-typepulse-tube refrigerators use a valveless compressor to generate the oscillating pres-sure for the cooling cycle. The compressor is usually driven by a linear motor. Withthis type of motor, it is possible to make a cooler with a continuous duty lifetime inexcess of ten years.
At present pulse-tube refrigeratorsarecompetitive to Stirling andGifford-McMahoncoolers, both in terms of temperature range and efciency. Pulse-tube refrigeratorshave no moving parts in the low temperature region, resulting in lower mechanicalvibration and longer life compared to other coolers. From the early eighties, NASAsAmes Research Center initiated the research on pulse tubes, recognizing its poten-tial for space applications. Pulse-tube refrigerators are widely used in the aerospaceindustry, for cooling sensitive detectors in satellites and in Earth observation instru-
ments.At the end of 20th century, the new technologies were transferred to non-aerospaceapplications, in particular to the electronic and computer industries. Pulse-tube re-frigerators are used for cooling high-temperature superconductors in mobile commu-nication, sensors in infrared cameras in military applications and high-power chips
2
-
7/28/2019 200510289.pdf
9/133
1.2 Different modelling approaches 3
in computers. Medicine is another application area for pulse-tube refrigerators. Pulsetubes areused to cool superconductingmagnets in diagnostic imaging systems (MRI),replacing the liquid-helium bath. This improves the quality of images due to the re-duction of vibration and it makes MRI systems smaller and cheaper.The development of pulse-tube cryocoolers is still at an early stage. Only few mod-els are currently in production. A prototype, built at Stirling Cryogenics & Refriger-ation B.V., is shown in Figure 1.1. However, pulse-tube cryocoolers are beginning toreplace the older types of cryocoolers in a wide variety of applications. Advantagessuch as simplicity, low cost and reliability, combined with high performance, haveresulted in an extensive study of pulse tubes in recent years.
1.2 Different modelling approachesTo predict the performance of pulse-tube refrigerators different analytical and nu-
merical models have been developed. Some models treat the entire system, someconcentrate on specic parts of the system where signicant energy losses are to beexpected.
Thermodynamical models[66], [77], [78] use the laws of thermodynamics to analysethe performance of a pulse tube. Such models are important for understanding thephysical processes occurring in the pulse tube. They explain why pulse-tube refrig-erators cool and they give a good qualitative prediction of the performance. Thesethermodynamical models are time-averaged. For a more accurate prediction of pulsetube performance one has to analyse compressibleoscillating gasow using full time-dependent models of uid dynamics.
The system of conservation laws forms the basis of uid dynamical models. In [65]a one-dimensional system of conservation laws was studied using analytical tech-niques. Regular asymptotic expansions were employed to derive simplied equa-tions and approximate solutions. The expressions obtained gave insight into the un-derlying uid mechanics and heat transfer.
Several attempts to linearise the conservation laws have been made. One of thepossible approaches is harmonic analysis, see [29], [76]. Harmonic time dependenceis used and all variables of the system are expanded in harmonic series. Then the one-dimensional conservation equations are solved through an expansion series solution.Harmonic analysis is widely used as a pulse tube development tool. One of the main benets of this approach is its capability to perform rapid optimisations in respectto dimensions and operational conditions of the pulse-tube cooler. However, thisapproach is restricted to small-amplitude harmonic pressure variations in the system.
In [3], [4], [52] a two-dimensional model for the tapered tube section of a pulse-tube refrigerator has been proposed. Linearised conservation equations were solved
analytically. Mean temperature proles for gas and tube wall were obtained. The ef-fects of operating frequency, taper angle, displacement volume ratio and phase angle between velocities at the ends of the tube on the net energy ow were studied.
In the series of articles [42], [43], [44] an anelastic approximation of the one- andtwo-dimensional conservation equations for the tube was used. An anelastic approx-
3
-
7/28/2019 200510289.pdf
10/133
4 Introduction
imation means ltering of sound from the uid equations. Its effect is to removeacoustic phenomena from the consideration. The anelastic approximation applieswhen the acoustic energy is small compared to the energy needed to compress andexpand the gas, which generally is the case in pulse-tube refrigerators. Mathemati-cally, it is an approximation of the uid equations where pressure gradients are ig-nored in themass conservationequation, but areretained in themomentum equation.It allows to construct a consistent set of linear differential equations amenable to a se-ries expansion solution in the small parameter - the ratio between gas displacementlength and tube length. The leading-orderproblem and the mean-steadyhigher orderequations were presented. The linearised equations were then simplied using com-plex embedding to eliminate the time dependence. The solutions for some limitingcases were discussed.
Due to the complexity of the conservation equations analytical solutions are es-sentially impossible. This is whynumerical modelsare of great importance. In [84] aone-dimensional numerical model was used to describe an orice pulse-tube refrig-
erator. All components of the system were considered with the basic assumptions: a)ideal gas, b) ideal heat exchangers, c) negligible axial heat conduction. The conserva-tion equations were solved using the nite volume method. In later works [81], [82]real gas properties were taken into account. In [35] basically the same model wasused for studying a double-inlet pulse tube and good agreement with experimen-tal data was reported. In [36] the mixed Eulerian-Lagrangian method was appliedfor simulating and visualising one-dimensional gas ow in a two-stage pulse-tubecooler operating in the 4K temperature region. The authors used a moving grid tofollow the exact tracks of gas particles as they move with pressure oscillation in thepulse tube (Lagrangian approach). For the regenerator a xed computational gridwas used (Eulerian approach). The disadvantage of all one-dimensional models is itsinability to accurately describe the effect of the uid-wall interaction.
Several attempts have been made recently, see [30], [88], to solve the full set of conservation equations using commercially available computational uid dynamics(CFD) software for compressible ows. In [30] gas ow inside the tube was treated asa two-dimensional axisymmetric ow. Cylindrical coordinates were used for the gov-erning equations. The system of conservation laws was solved using the nite vol-ume method with implicit time integration. The analytical solution valid for isother-mal laminar ow was used in setting up the oscillating velocity radial prole. Thesimulation results suggest that the ow strongly depends on the applied inlet veloc-ity proles. Moreover, the internal velocity distribution induced by the inlet owprole might be an important factor in determining the optimum compressor driv-ing frequency. In [88] results of three-dimensional computations for gas ow in thetube are presented. Numerical simulation was used to determine the effect of three-dimensional phenomena such as mass streaming and turbulence. The conclusion was
that three-dimensional modelling tends to be very time consuming and therefore notapplicable for real system optimisation. Neither work included dimensional analysisand identication of dimensionless numbers characterising the ow and heat trans-fer. However, use of CFD codes without mathematical insight easily leads to resultsof poor quality or even to erroneous results. In the case of the pulse tube, where we
4
-
7/28/2019 200510289.pdf
11/133
1.3 Our objectives 5
are dealing with low-Mach-number ow (Ma10 3 ), the standard numerical meth-ods for compressible ows are very inefcient and often do not function properly.
1.3 Our objectivesThe current project is a result of collaboration between the Applied Physics De-
partment (TU/e), Stirling Cryogenics & Refrigeration B.V. and the Department of Mathematics and Computer Science (TU/e). For about ten years pulse-tube refriger-ators have been the main subject of research in the Low Temperature Physics Groupat the Department of Applied Physics (TU/e). The group has unique expertise in theeld and a substantial number of publications [7380], [87], [90]. The previous PhDprojects [28], [66], [69] were focused on the theoretical and the experimental aspectsof pulse-tube refrigerators.
Stirling Cryogenics & Refrigeration B.V. is one of the main players in the globalmarketfor cooling equipment. The company is theworlds biggest supplier of medium-and large size cooling installations based on the Stirling principle. The companyssuccess is based on signicant investment in innovative research and the pulse-tuberefrigerator is considered as a promising cooling device in high-tech industrial appli-cations.
The main objectives of the project are
developmentof a mathematical model for simulating the heat transport in com-pressible oscillating gas ow in the tube section of a pulse-tube refrigerator, development of suitable numerical methods, implementation of the developed model in a simulation tool for calculating thedynamic characteristics of the cooling system.
The purpose of the modelling is to predict energy losses. Losses in the regeneratorhave been studied in [7678]. Unfortunately, the losses in the tube are not as wellknown. A particular prominent shortcoming is the inability of models to predictthe temperature prole in the tube, which is extremely difcult to measure. As wasdiscussed in the previous section, the existing models and solution methods are notcompletely satisfactory. The limited progress is due to the complexity of the coupleddifferential equations representing mass, momentum and energy conservation. Theproblem under consideration has been the subject of research mostly in engineeringand physical communities and there is need for a much more detailed mathemati-cal study. Dimensional and multi-scale analyses are very effective techniques. Theseallow the derivation of a leading-order system, which is much simpler than the orig-
inal system of conservation equations. The development of numerical methods, es-pecially designed for a given ow problem, is a challenging task. The numericalmodel gives the possibility to consider not only limiting cases, but also more generalproblems. It provides a powerful tool for estimating the parameters of cooling sys-tems, such as temperature, velocity, mass ow, enthalpy ow, which leads to a deeper
5
-
7/28/2019 200510289.pdf
12/133
6 Introduction
understanding of heat transfer and uid-wall interaction in oscillating ow. The sim-ulation program is intended to give engineers a practical tool to estimate and reduceenergy losses.
1.4 Outline of the thesis
This thesis contains six chapters. Chapter 2 gives a mathematical description of theprocesses occurring in a pulse tube. First the basic working principles of pulse-tuberefrigerators are explained. Then a mathematical model for unsteady compressibleviscous ow is formulated. It is based on the conservation laws written in differ-ential form and using primitive variables. The dimensionless numbers that governthe given ow problem are identied. According to dimensional analysis, the tubeconveys a low-Mach-number compressible ow. Asymptotic expansions in terms of powers of M2 , a parameter related to the Mach number, are used in the derivation of leading-orderequations. The asymptotic consideration revealsseveralkey features of low-Mach-number compressible ows. Two physically distinct roles of pressure aredistinguished: one as thermodynamic variable and one as hydrodynamic variable.The thermodynamic pressure appears in the energy equation and in the equation of state. It is spatially uniform and thus a function of time only. It is responsible forthe global compression and expansion. The hydrodynamic pressure appears in themomentum equations and is induced by inertia and viscous forces. One-dimensionaland two-dimensional cylindrical axisymmetric cases are considered. For both casesthe resulting systems of equations, together with boundary and initial conditions,suitable for numerical solution, are given.
Chapter 3 presents the numerical methods for the solution of the resulting systemof equations in the one-dimensional case. The governing equations are discretisedusing nite difference techniques. The computation of the velocity eld is decoupledfrom the temperature computation by using values from the previous time level. Thetemperature equation is a convection-dominated equation. It is solved using state-of-the-art ux-limiter schemes in an attempt to preserve the steep temperature gra-dients that occur in the tube. The velocity in the one-dimensional case can be foundfrom the so-called constraint equation. Although there is no need to compute therst-order hydrodynamic pressure in the one-dimensional case, we have done so toinvestigatedifferentpressure-correctionalgorithms and problems related to pressure-velocity coupling. The optimal scheme found for the one-dimensional problem has been used in solving the two-dimensional system of equations. Our pressure correc-tion scheme is based on the constraint equation and not on the continuity equation,which is different from the common approach in the simulation of compressible owproblems. The method has close resemblance with pressurecorrection in incompress-
ible ow computations, except for a non-zero velocity divergence constraint. Finally,we explain how more accurate solutions can be obtained through grid renement.Rening a grid throughout the entire computational domain can be expensive, par-ticularly in multi-dimensions. Instead of applying a non-uniform locally rened gridwe use several uniform grids with different mesh sizes that cover different parts of
6
-
7/28/2019 200510289.pdf
13/133
1.4 Outline of the thesis 7
the domain. Besides the global grid, ne local grids are used which are also uniform.They cover only those parts of the domain that contain the high activity regions. Themesh size of each of these grids follows the activity of the solution. The solution iscalculated on the composite grid which is the union of the uniform subgrids. Thisrenement strategy is known aslocal uniform grid renement(LUGR).
Chapter 4 describes the numerical methods for the resulting system of equationsin the two-dimensional case. The same techniques as in the one-dimensional caseare used. The convection-diffusion equation for the gas temperature in the two-dimensional model is combined with a heat conduction equation for the wall temper-ature. To study gas-wall interaction in detail, we employ a non-uniform boundary-layer type of grid. The ux-limiter scheme is to be modied for non-uniform grids.The pressure correction method, developed in the Chapter 3 and specially designedfor low-Mach-number compressible ows, is extended to the two-dimensional case.The correctness of the numerical techniques described above is demonstrated withseveral examples: Hagen-Poiseuille ow, starting ow, ow due to an oscillating
pressure gradient, backward facing step ow and Graetz heat transfer problems. Therst three examples are well known problems with analytical solutions. The back-ward facing step ow is a benchmark problem widely used in computational uiddynamics, much experimental and numerical information about this type of ow isavailable. The Graetz problems allow us to check our temperature computations.
Chapter 5 presents the computations for a typical pulse-tube refrigerator. First, theone-dimensional results are discussed. The velocity, temperature, mass ow rate andenthalpy ow are investigated for two driving pressures: sinusoidal and trapezoidal.The developed model is validated by comparing the results for sinusoidal pressurewith a rst-order harmonic analysis. The one-dimensional results of this chapter,presented in [46], [47], are obtained at low computational cost and they serve as areference for the two-dimensional results. With the two-dimensional model the heattransfer between gas and wall is studied in detail. Thermal and viscous effects inradial direction are now taken into account.
Finally, Chapter 6 summarises the results of this study and suggests directions forfuture work.
7
-
7/28/2019 200510289.pdf
14/133
-
7/28/2019 200510289.pdf
15/133
CHAPTER 2
Modelling
In this chapter the mathematical description of the processes occurring in a pulse tubeis given. First the basic working principles of pulse-tube refrigerators are explained.Then the mathematical model for unsteady compressible viscous ow is formulated.It is based on the conservation laws written in differential form and using primi-tive variables. The dimensionless numbers that govern the given ow problem areidentied. According to dimensional analysis, the tube conveys a low-Mach-numbercompressible ow. Asymptotic expansions in terms of powers of M2 , a dimensionlessnumber related to the Mach number, are used in the derivation of leading-order equa-tions. One-dimensional and two-dimensional cylindrical axisymmetrical cases areconsidered. For both cases the resulting systems of equations together with bound-ary and initial conditions, suitable for numerical solution, are given.
2.1 Physical modelThe pulse-tube refrigerator works by the cyclic compression and expansion of a
xed quantity of gas, usually helium. The essential elements of a pulse-tube refrig-erator are shown in Figure 2.1. Due to heat exchange between gas, regenerator, tubewalls and the three heat exchangers, a temperature difference develops along thetube. The pressure oscillations in the system are generated by a piston or, alterna-tively, by switching valves. The aftercooler (AC), see Figure 2.1a, removes the heat of compression so that the regenerator can work more efciently. The regenerator actsas follows: it absorbs heat from the gas in the compression part of the pressure cycleand it returns heat to the gas in the expansion part. To achieve this, the regeneratoris lled with a matrix - some kind of solid porous material with a large heat capacity
and a large heat-exchanging surface. The cold heat exchanger (CHX) is the coldestpoint of the system. Here the heat is extracted from the load to be cooled. In the tube,the compressible gas oscillates. If there is a suitable phase relationship between thepressure and the gas ow, heat will be transported from the cold end to the warmend. The hot heat exchanger (HHX) removes the heat carried through the tube. The
9
-
7/28/2019 200510289.pdf
16/133
10 Modelling
Figure 2.1: A schematic representation of Stirling-type pulse-tube refrigerators: (a) basic pulse tube and (b) orice pulse tube. From right to left the sys-tem consists of a piston, an aftercooler (AC), a regenerator, a cold heatexchanger (CHX), a tube, a hot heat exchanger (HHX). In b) an orice anda reservoir are added.
hot heat exchanger is maintained at ambient temperature. In the orice design, seeFigure 2.1b, the basic pulse tube has been modied by adding a reservoir (buffer) anda ow resistance (orice). The orice is a resistance valve that is tuned for optimalperformance. The reservoir is large compared to the pulse tube. Gas ows throughthe orice due to a pressure difference. More gas is contributing to the cooling powernow and this improves the efciency of the cooler. The cycle results in net enthalpyow from the cold end to the hot end thus providing a continuous refrigeration effect.
An illustrative way of explaining the cooling process at the cold end is presentedin Figure 2.2. The pressure in the tube is varied in four steps, see Figure 2.2a.
1. Froma via b to c. The compression step. The piston moves to the left. Theorice is closed. The pressure rises.
2. Fromc to d . The orice is open so that gas ows from the tube to the buffer.At the same time the piston moves to the left such that the pressure in the tuberemains constant.
3. Fromd to e. The expansion step. The piston moves to the right. The orice isclosed. The pressure drops.
4. Frome via f to a. The orice is open so that gas ows from the buffer into thetube. At the same time the piston moves to the right such that the pressure inthe tube remains constant.
We will follow a gas parcel, which is inside the regenerator at the start of the cycle(point a), see Figure 2.2b.
1. Froma via b to c. When the pressure rises, the gas parcel moves through theregenerator in the direction of CHX. Its temperature remains constant due to
10
-
7/28/2019 200510289.pdf
17/133
2.1 Physical model 11
(a) pressure
(b) temperature
Figure 2.2: Pressure in a pulse tube as a function of time and temperature of the gaselement as a function of position.
good heat exchange with the regenerator material. At pointb the gas parcelleaves the CHX and enters the tube with the temperatureT C . Fromb to c thegas parcel is compressed adiabatically, while it moves towards the orice. Itstemperature rises together with the pressure.
2. Fromc to d. The gas parcel moves to the left. The pressure and the temperatureare constant.
3. Fromd to e. When the pressure drops the gas parcelmoves back to the directionof CHX. As it is thermally isolated, its temperature drops together with thepressure. The temperature of the gas parcel at pointe is belowT C .
4. Frome via f to a. The gas parcel moves to the right. The pressure and thetemperature are constant as long as the gas parcel is in the tube. At pointf thegas parcel leaves the tube and enters the CHX withT < T C . When passing theCHX the gas extracts heat from it and warms up to the temperatureT C . Thatis when the cooling takes place. The amount of heat which the gas takes awayfrom the heat exchanger is the cooling power. In the end of the cycle the gasparcel moves inside the regenerator to its original position.
11
-
7/28/2019 200510289.pdf
18/133
-
7/28/2019 200510289.pdf
19/133
2.3 One-dimensional formulation 13
First law of thermodynamics: the rate of change of energy equals the differenceof the rate of heat addition and the rate of work done.
The conservation equations of uid dynamics can be formulated in many equiva-lent ways, see [8]. For general compressible uid ow, differential forms of theseequations in terms of so-called primitive variables, namely density(x,t), velocityu (x,t), temperatureT (x,t) and pressurep(x,t), are
conservation of mass (continuity equation):
DDt
+ u = 0, (2.1)where D/Dt = /t + u is the material derivative, is the gradient operatorand is the divergence operator.conservation of momentum (equation of motion):
D uDt = p + f, (2.2)
where is the stress tensor andf is the external force per unit mass of uid.conservation of energy (temperature equation):
c pDT Dt
=DpDt
q , (2.3)where cp is the specic heat at constant pressure,q is the heat ux vector and is theviscous dissipation function. Appropriate expressions for , f , q and will be givenin Section 2.3 and Section 2.4, in correspondence to the chosen space dimension andcoordinate system.
The temperature, pressure and density are related via the thermalequation of state,
which for ideal gas is p = Rm T, (2.4)where Rm is the specic gas constant.
2.3 One-dimensional formulation
2.3.1 Governing equationsLet us consider a one-dimensional region0 < x < L , where L is the length of the
tube section of the cooler. We assume
laminar plug ow, Newtonian uid, ideal gas, no external forces act on the gas in the tube.
13
-
7/28/2019 200510289.pdf
20/133
14 Modelling
In the momentum equation (2.2) the viscous stress tensor has now one component,namely
x = 2 u
x+
2
3 (
u ) =
4
3
u
x, (2.5)
where is the dynamic viscosity.In the energy equation (2.3) the one-dimensional heat ux is
q x = k gT x
, (2.6)
where k g is the thermal conductivity of the gas. The viscous dissipation term is
= xu x
. (2.7)
Substitution of (2.5) - (2.7) in the equations (2.1) - (2.4) gives
t
+ x
(u ) = 0, (2.8)
u t
+ u u x
= px
+43
x
u x
, (2.9)
c pT t
+ u T x
=pt
+ u px
+
xk g
T x
+43
u x
2
, (2.10)
p = Rm T. (2.11)The system of equations (2.8) - (2.11) will rst be made dimensionless. This leadsto identication of the dimensionless numbers that govern the given ow problem.Analysis of dimensionless numbers is highly important and has strong consequencesfor the resulting set of equations and for the numerical methods to be used.
The scaling parameters are chosen as follows: the shortest physical time-scale of importance is1/ (time for one piston oscillation divided by2 ), where is theangular frequency of the pressure variation. We introduce u as the representativeamplitude of the velocity variation and therefore u/ as the typical length-scale. Let p be the amplitude of the pressure variation,p av the average pressure,T a the am-
bient temperature, a typical density, a typical viscosity andk g a typical thermalconductivity of the gas. We introduce dimensionless variables (indicated by a hat)via
= , T = T a T , p = p av + p^ p, u = u u,x = ( u/ )x, t = t/, = , k g = k g k g .
(2.12)
The way we dene the dimensionless pressure differs from the denition of the otherdimensionless variables. From the physical model of the pulse tube we know twocharacteristic values for the driving pressure: the average pressure and the ampli-tude of the pressure oscillations. It is common [85, p. 580] and, in fact, advantageous
14
-
7/28/2019 200510289.pdf
21/133
2.3 One-dimensional formulation 15
to work with p p av = p^ p in place of p . This allows us to avoid the problem of cancellation caused by subtracting two nearly equal pressures in the numerical ap-proximation of the pressure gradient.
The governing equations (2.8) - (2.11) become (without ambiguity the hats on thedimensionless variables are now omitted):
t
+
x(u ) = 0, (2.13)
u t
+ u u x
= 1
M2px
+4
3Re
x
u x
, (2.14)
T t
+ u T x
= B ( 1)
pt
+ u px
+1
Pe
xk g
T x
+43
1
M2Re
u x
2
,
(2.15)
(A+ p)B = T. (2.16)The relevant dimensionless numbers areoscillatory Reynolds number Re= u
2
,
Prandtl number Pr= cp k g
,
Peclet number Pe= RePr= u 2 cp
k g ,
Mach number Ma= u ( pav / )1/2
,
modied Mach number M= u
( p/ )1/2,
adiabatic expansion factor 1
=Rmcp
,
pressure ratio A=p av
p ,
B = p
Rm T a.
The Reynolds number in oscillating ow, sometimes called the kinetic Reynoldsnumber, depends on frequency. It indicates how strong the inertia forces are com-
pared to the viscous forces. The Prandtl number gives an indication for the con-duction of heat with respect to the diffusion of momentum. It depends only on theproperties of the uid. The Peclet number shows the ratio of heat convection to heatconduction. The Mach number Ma provides a measure of the compressibility (orchange in density) due to motion. It is dened as the ratio of convective velocity to
15
-
7/28/2019 200510289.pdf
22/133
-
7/28/2019 200510289.pdf
23/133
2.3 One-dimensional formulation 17
200 400 600 800 1000 1200 14000
5
10
15
20
25
30
35
40
Re
R 0
/
intermittently turbulent
fully turbulentlaminar
perturbedlaminar
Figure 2.4: Oscillating ow regimes.
of the pipe or near the wall. Inintermittently turbulent owturbulent-like activity ap-pears near the walls during periods of deceleration. It was found experimentally, us-ing smoke visualisation anda hotwire anemometer [92], that at high kinetic Reynoldsnumbers periodic turbulentburstsoccur nearthewall. A laminar-likeow exists dur-ing the acceleration phase of the cycle, whereas a turbulent-like ow exists during acertain period of the deceleration phase. This is because at high kinetic Reynoldsnumbers the axial velocity near the wall is higher than at the centerline such thatthere exists an inexion point in the velocity prole near the wall. This state has been
termed turbulescentby some researchers. Infully turbulent owturbulent bursts occurin the acceleration phase as well as in the deceleration phase.Let us consider the pulse tube operating at 20 Hz. For such tubes the velocity am-
plitude is 1.5 m/s. The average distance which gas particles travel in the tube duringone-half of an oscillating cycle (displacement length) is 0.012 m. The length of thetube is 0.2 m. All relevant physical data for a typical single-inlet pulse tube, operat-ing at 20 Hz, are given in Appendix A. The corresponding dimensionless numbersare
Re 4.2 103 , Pr 0.66, Pe 2.6 103 , Ma 1.9 10 3 ,
M 4.610 3 , 1
0.4, A 6, B 0.17.
For the given pulse tube parameters, we haveR0 / 96, Re 230, which is in theperturbed-laminar ow region in Figure 2.4.
17
-
7/28/2019 200510289.pdf
24/133
18 Modelling
2.3.2 Low-Mach-number approximationIn our pulse tube, specied above, the Mach number is small. Although compress-
ibility cannot be neglected because of density changes induced by the driving pres-sure. This type of ow is called low-Mach-number or weakly compressible ow.
The momentum equation (2.14) can be rewritten as follows
px
=4M23Re
x
u x
M2 u t
+ u u x
. (2.17)
The rst and second terms on the right represent viscous and inertial forces. Forexample, in the specied pulse tube the constants M2 / Re and M2 are of the order of 10 9 and 10 5 , respectively. This means that the inertial and viscous forces are toosmall to produce a signicant pressure gradient; so the right-hand side of equation(2.17) is approximately zero.
Mathematically, as M2 tends to zero, the pressure gradient contribution in the mo-
mentum equation (2.14) tends to zero. To explore the consequences of this, we per-form an asymptotic analysis, closely following [37] . We expand the four relevantgasdynamic variables in terms of powers of M2 . The variables in series form are
p(x, t ) = p 0 (x, t ) + M2 p1 (x, t ) + o(M2 ), (2.18)
u (x, t ) = u 0 (x, t ) + M2 u 1 (x, t ) + o(M2 ), (2.19)
(x, t ) = 0 (x, t ) + M2 1 (x, t ) + o(M2 ), (2.20)
T (x, t ) = T 0 (x, t ) + M2 T 1 (x, t ) + o(M2 ) . (2.21)
Substituting the expansions (2.18) - (2.21) into the original system (2.13) - (2.16),combining all powers of M2 and equating them to zero, yields the following twosystems:
leading-order system 0t
+
x(0 u 0 ) = 0, (2.22)
p 0x
= 0, (2.23)
0T 0t
+ u 0T 0x
= B ( 1)
p 0t
+1
Pe
xk g
T 0x
, (2.24)
(A+ p0 )B = 0 T 0 . (2.25) rst-order system
1t
+ x
(1 u 0 ) +
x(0 u 1 ) = 0, (2.26)
0u 0t
+ u 0u 0x
= p 1x
+4
3Re
x
u 0x
, (2.27)
18
-
7/28/2019 200510289.pdf
25/133
2.3 One-dimensional formulation 19
0T 1t
+ u 0T 1x
+ 1T 0t
+ ( 0 u 1 + 1 u 0 )T 0x
= B ( 1)
p 1t
+ u 0p 1x
+
1Pe
x k g
T 1x +
43
1
1Re
u 0x
2
, (2.28)
p1B = 0 T 1 + 1 T 0 . (2.29)The asymptotic consideration reveals several key features of low-Mach-number
ows.First, it exhibits two physically distinct roles of pressure, namely as
a thermodynamic variable,p 0 , and as a hydrodynamic variable,p 1 .
The acoustic pressure, which is
O(M), does not play a role in our system. It is ex-
cluded from the analysis by choosing the time scale as1/ . In this sense, the name pulse tubeis misleading.
Equation (2.23) shows that the leading pressure is spatially uniform and, therefore,a function of time only. We shall refer top 0 as the thermodynamic pressure anddenote it byP(t ). It appears in the temperature equation (2.24) and in the equationof state (2.25).P(t ) is the global pressure driving the system. Herein it is a givenfunction of time.
Second, it shows that the contribution of the viscous forces to the energy equation,the last term in the right-hand side of (2.15), is not in the leading order system. Itappears for the rst time in the energy equation (2.28) of orderO(M2 ).Neglecting the trivial momentum equation and dropping the zero subscript, theleading-order system (2.22) - (2.25) simplies to
t
+
x(u ) = 0, (2.30)
T t
+ u T x
= B ( 1)
dPdt
+1
Pe
xk g
T x
, (2.31)
(A+ P)B = T. (2.32)The system (2.30) - (2.32) governs the three unknowns(x, t ), u (x, t ), T (x, t ). Com- bining the equations (2.30) and (2.31), we arrive at
(T )t
+(uT )
x= B ( 1)
dPdt
+1
Pe
xk g
T x
. (2.33)
Substitution of (2.32) in the left-hand side of (2.33) eliminates,
d ((A+ P)B )dt
+((A+ P)B u )
x= B ( 1)
dPdt
+1
Pe
xk g
T x
. (2.34)
19
-
7/28/2019 200510289.pdf
26/133
20 Modelling
We thus nd the following equation for the velocity
u
x=
1
(A+ P) dP
dt+
1
B (A+ P)1
Pe
xk g
T
x. (2.35)
To obtain the equation for the temperature, we eliminate the density in (2.31), usingequation (2.32). Thus
(A+ P)B T
T t
+ u T x
= B ( 1)
dPdt
+1
Pe
xk g
T x
. (2.36)
Finally the equations for the velocity and the temperature are
u x
= (t )
xk g
T x
+ s1 (t ), (2.37)
T t = (t )T
x k g
T x u
T x + s2 (t )T, (2.38)
wheres1 (t ) =
1(A+ P(t ))
dP (t )dt
, (2.39)
s2 (t ) =1
(A+ P(t )) 1
dP (t )
dt, (2.40)
(t ) =1
B (A+ P(t ))1
Pe 1. (2.41)
Assuming that the gas thermal conductivityk g is constant ( in terms of dimension-less values this means thatk g = 1 ), (2.37), (2.38) simplify to
u x
= (t ) 2 T x 2
+ s1 (t ), (2.42)
T t
= (t )T 2 T x 2
u T x
+ s2 (t )T. (2.43)
The equations (2.42), (2.43) form the basis of our one-dimensional model. Note that(2.42) is a velocity divergence constraint. We observe that the velocity divergence isdriven by heat conduction and global pressure changes. The temperature equation(2.43) is a nonlinear convection-diffusion equation with the presence of convection by the variable velocityu (x, t ) and diffusion through the diffusion coefcientT , see(2.41). The diffusion coefcient is denotedbyT in order to emphasise that, accordingto our dimensional analysis, it has a small value.
2.3.3 Boundary and initial conditionsTo complete the mathematical model, we dene boundary and initial conditions.
The positionx = 0 is the hot end of the tube andx = L is the cold end.
20
-
7/28/2019 200510289.pdf
27/133
-
7/28/2019 200510289.pdf
28/133
22 Modelling
C=CorA t
p u , A=
p av p , E =
pb p . (2.51)
The dimensionless equation (2.48) readsdp bdt
= D pb (t )( P(t ) + A E pb (t )) pb (0) = 1
, (2.52)
with
D=Cor cpV b cv
p
. (2.53)
The nonlinear differential equation (2.52) is known as a Riccati equation. It can some-times be solved analytically if an analytical expression for the shape of the pressureoscillationP(t ) is given (for example a sinusoidal function). In other cases, numericalmethods should be used.
The temperature equation (2.38) requires two boundary conditions and an initialcondition. Because the ow in the tube reversesperiodically, the boundary conditionsfor the temperature at any moment of time depend on the local velocity direction.If the gas is owing into the tube, it has the temperature of the heat exchanger (T H at the hot end andT C at the cold end). If the gas is owing out of the tube, itnever has the temperature of the heat exchanger. If we assume a zero heat ux at the boundary it will give us homogeneous Neuman boundary conditions. Another and better possibility would be to use the temperature equation (2.38) at the boundariesto approximately compute the heat ux. Then the homogeneous Neuman boundaryconditions are replaced by
u (0, t )T
x(0, t ) = s2 (t )T (0, t )
T
t(0, t ), (2.54)
u (L, t )T x
(L, t ) = s2 (t )T (L, t ) T t
(L, t ). (2.55)
The boundary conditions are thus
T (0, t ) = T H if u (0, t ) 0T x
(0, t ) = ( s2 (t )T (0, t ) T t
(0, t )) /u (0, t ) if u (0, t ) < 0, (2.56)
T (L, t ) = T C if u (L, t ) 0T x
(L, t ) = ( s2 (t )T (L, t ) T t
(L, t )) /u (L, t ) if u (L, t ) > 0 . (2.57)
Note that with upwinding the BCs we avoid the problem of the tiny ( 1) ther-mal boundary layers near the heat exchangers.
22
-
7/28/2019 200510289.pdf
29/133
2.3 One-dimensional formulation 23
A linear prole can be taken as initial condition for the temperature
T (x, 0 ) = T H ( T H T C )x
L. (2.58)
The corresponding velocity is then obtained from (2.42) as
u (x, 0 ) = s1 (0)x + u H (0). (2.59)
Basic pulse-tube refrigeratorFor the basic pulse tube, Fig. 2.1a, the velocity at the hot endu H (t ) is zero. The hot
end temperature is constant and the cold end temperature varies with velocity, like(2.55)
T (0, t ) = T HT (L, t ) = T C if u (L, t ) 0 u (L, t )
T x (L, t ) = s2 (t )T (L, t )
T t (L, t ) if u (L, t ) > 0
. (2.60)
2.3.4 Two-dimensional corrections to the one-dimensional model
The tube wall plays an important role in the cooling process. Wall effects can beincluded in our one-dimensional model. Additional terms will appear in the mo-mentum equation (friction force at the wall) and in the energy equation (heat transferwith the wall). The modied momentum and energy equations (2.9), (2.10) are
u t
+ u u x
= px
+43
x
u x
c f u, (2.61)
c pT t
+ u T x
=pt
+ u px
+
xk g
T x
+43
u x
2+ h (T w T ), (2.62)
where c f is the friction factor,h is the convective heat transfer coefcient andT w isthe temperature of the wall.
Because of lack of suitable heat transfer and pressure drop correlations for recipro-cating ow conditions, the modelling is usually based on correlations derived fromsteady-state unidirectional laminar ow assumptions, see [32, p. 490]. Thus quasi-steady models use
cf = 8/R 20 ,
h =NuD k g
Dwith NuD = 3.66.
However, this approach proved to be insufcient for the analysis of momentum andheat transfer in unsteady oscillating ows at high frequencies.
The availableexperimental data for the friction factorand theconvective heat trans-fer coefcient for reciprocating ow can be summarised as follows:
23
-
7/28/2019 200510289.pdf
30/133
24 Modelling
The friction factor is larger than in steady ow. In [96] the additional term thataccounts for unsteady friction was derived. This term, which depends on theow history, can be incorporated in a numerical model. Experimental resultsfor fully developed reciprocating laminar ow are given in [93]. For hydrody-namically developing reciprocating laminar-turbulent ow relatively few pa-pers have been reported, see [31].
The convective heat transfer coefcient is much larger than in steady ow. Theheat transfer of working gas can be enhanced by the ow oscillations at rates or-ders of magnitude greater than by pure conduction, see [38,39,94]. Mechanismsof this enhancement are not yet explained. Even though such mechanisms have been proposed in recent literature [41, 45], they are not all in agreement. Exper-imental data available for the heat transfer correlations for developing laminarreciprocating ow are limited and quite incomplete and therefore not suitablefor general use.
From the above considerations it can be concluded that for an accurate description of uid-wall interaction in oscillating ow one has to apply two dimensional modelling.
2.4 Two-dimensional formulation
2.4.1 Governing equationsThe two-dimensional axisymmetrical domain under consideration is shown in Fig-
ure 2.5. Gas ows in the cylindrical tube of lengthL and inner radius R0 . The tubewall has thicknessl = R1 R0 . Assuming the uid to be Newtonian and neglectingexternal forces, the equations (2.1) - (2.4) in cylindrical axisymmetrical coordinates,see [8], are
t
+ z
(u ) + 1r
r
(rv ) = 0, (2.63)
u t
+ u u z
+ vu r
= pz
1r
r
(r rz ) + zzz
, (2.64)
vt
+ u vz
+ vvr
= pr
1r
r
(r rr ) + rzz
, (2.65)
c pT t
+ u T z
+ vT r
=pt
+ u pz
+ vpr
+1r
r
rk gT r
+z
k gT z
+ ,
(2.66)
p = Rm T. (2.67)
The components of the viscous stress tensor in the equations (2.64) and (2.65) are
zz = 2 u z
+23
( u ) = 43
u z
23
vr
23
vr
, (2.68)
24
-
7/28/2019 200510289.pdf
31/133
2.4 Two-dimensional formulation 25
Figure 2.5: Two-dimensional axisymmetrical domain.
rr = 2 vr
+23
( u ) = 43
vr
23
vr
23
u z
, (2.69)
rz = u r+ v
z , (2.70)
u =1r
r
(rv ) +u z
. (2.71)
The viscous dissipation factor in cylindrical axisymmetrical coordinates is
= ( : u ) = zzu z
rrvr
rzu r
+vz
. (2.72)
Dimensionless variables are introduced as in the one-dimensional case
= , T = T a T , p = p av + p^ p, t = t/, k g = k g k g , = ,
u = u u, v = v v, z = ( u/ )z, r = ( v/ )r, u = v .
The typical velocities and length scales are taken the same in axial and radial direc-tions. We like to have a general model valid for any tube, without the assumptionthat the tube length is much larger than the tube radius. This gives us the possibilityto study entrance effects in the tubes with arbitraryL/D ratios.
After non-dimensionalisation the governing equations (2.63) - (2.67) become
t
+z
(u ) +1r
r
(rv ) = 0, (2.73)
u t
+ u u z
+ vu r
= 1M2
pz
1Re
1r
r
(r rz ) + zzz , (2.74)
vt
+ u vz
+ vvr
= 1
M2pr
1
Re1r
r
(r rr ) + rzz
, (2.75)
25
-
7/28/2019 200510289.pdf
32/133
26 Modelling
T t
+ u T z
+ vT r
= B ( 1)
pt
+ u pz
+ vpr
+1
Pe1r
r
rk gT r
+
1
Pe
z k gT z +
1
M2
Re, (2.76)
(A+ p)B = T. (2.77)2.4.2 Low-Mach-number approximation
Closely following the procedure from the one-dimensional consideration, we ex-pand the variables in terms of powers of M2 . The variables are written now in seriesform as
p(z,r, t ) = p 0 (z,r, t ) + M2 p1 (z,r, t ) + o(M2 ), (2.78) u (z,r, t ) = u 0 (z,r, t ) + M2 u 1 (z,r, t ) + o(M2 ), (2.79)
v(z,r, t ) = v0 (z,r, t ) + M2
v1 (z,r, t ) + o(M2
), (2.80)(z,r, t ) = 0 (z,r, t ) + M2 1 (z,r, t ) + o(M2 ), (2.81)T (z,r, t ) = T 0 (z,r, t ) + M2 T 1 (z,r, t ) + o(M2 ). (2.82)
The low-Mach-number approximation replaces the original system (2.73) - (2.77)with the leading order system:
0t
+
z (0 u 0 ) +
1r
r
(r 0 v0 ) = 0, (2.83)
p 0z
= 0, (2.84)
p 0r = 0, (2.85)
0T 0t
+ u 0T 0z
+ v0T 0r
= B ( 1)
dp 0dt
+1
Pe1r
r
rk gT 0r
+
z k g
T 0z
,
(2.86)
(A+ p0 )B = 0 T 0 . (2.87)As in the one-dimensional case, the equations (2.84), (2.85) show that the leading-
order pressure p 0 is spatially uniform and therefore a function of time only. Usingthe notationp 0 (z,r, t ) = P(t ), as in Section 2.3.1, the leading-order system reduces to
0
t+
z (0 u 0 ) +
1
r
r(r 0 v0 ) = 0, (2.88)
0T 0t
+ u 0T 0z
+ v0T 0r
= B ( 1)
dPdt
+1
Pe1r
r
rk gT 0r
+
z k g
T 0z
,
(2.89)
26
-
7/28/2019 200510289.pdf
33/133
-
7/28/2019 200510289.pdf
34/133
-
7/28/2019 200510289.pdf
35/133
2.4 Two-dimensional formulation 29
Figure 2.6: Wall domain with boundary conditions.
2.4.3 Wall modelThe two-dimensional model allows us to study the localheat exchange betweenthe
gas and the wall. The wall of thicknessl is modelled using the same axisymmetricgeometry as for the gas domain. We will solve the temperature equation for the wallsimultaneously with the temperature equation for the gas. The domain under con-sideration together with applied boundary conditions is shown in Figure 2.6. Duringoperation the pulse tube is placed in a vacuum chamber. It is therefore assumed thatheat exchange with the surroundings and radiation losses are negligible. Thus theouter wall surface is adiabatic. At the interface between the wall and the gas conti-nuity of temperature and heat ux is assumed. Energy conservation for the tube wallrequires
w cwT wt
= k w 2 T wr 2
+1r
T wr
+ 2 T wz 2
. (2.110)
For the non-dimensionalisation of equation (2.110) the time and length scales are asfor the ow: t = t/, z = ( u/ )z, r = ( u/ )r . In non-dimensional form equation(2.110) reads
T wt
= 2 T wr 2
+1r
T wr
+ 2 T wz 2
. (2.111)
The dimensionless thermal diffusivity coefcient , sometimes called Fourier num- ber Fo , gives the ratio of the rate of heat conduction to the rate of thermal energystorage
=k w
w cw u 2.
The wall temperatureandthe gas temperature arecoupledthrough thedimensionlessinterface condition T w
r=
T r
with = k gk w
. (2.112)
For a typical single-inlet pulse tube, operating at 20 Hz, 2.6 10 4 and 0.01.
29
-
7/28/2019 200510289.pdf
36/133
30 Modelling
T u v p
hot endT = T H , u
0
T z
= f (r, t ), u < 0
u = u H v = 0
cold endT = T C , u 0T z
= g(r, t ), u > 0
v = 0 p = 0
wallk g T/r = k w T w /r
T = T w
u = 0 v = 0
symmetry T/r = 0 u/r = 0 v = 0 p/r = 0
Table 2.1: Boundary conditions for the two-dimensional model.
2.4.4 Boundary and initial conditions
The mathematical model is not complete without specifying the boundary and ini-tial conditions. In this section the boundary and initial conditions for the equations
(2.103), (2.104) and (2.109) are given.The choice of boundary conditions for pressure and velocities is an art in itself,
see [23], [55]. It is of great importance that we supply physically realistic, well-posed boundary conditions. For the ow equations (2.103) - (2.105) we use the followingconguration: wall, one boundary with given velocities, one boundary with xedpressure and a radial symmetry boundary. So we prescribe the velocities at the hotend and the rst-order pressure at the cold end. The rst-order pressure is a some-what mysterious quantity. It is not a thermodynamic variable. It is in one sensea mathematical artifact - a Lagrange multiplier that ensures that the velocity diver-gence constraint is satised. Yet its gradient is a relevant physical quantity - a forceper unit volume. We set the rst-order pressure at the cold end equal to zero. It meansthat at this boundary the total pressure is equal to thermodynamic pressure. At thesymmetry line we impose zero radialderivatives for all variables except for the radialvelocity, which itself must be zero at the centre line.
The boundary conditions for the temperature equation (2.109) at the hot and coldends are the same as in the one-dimensional model, equations (2.54), (2.55), except
30
-
7/28/2019 200510289.pdf
37/133
2.4 Two-dimensional formulation 31
for possible r-dependence. They read
T (0,r, t ) = T H if u (0,r, t )
0
T z
(0,r, t ) = f (r, t ) if u (0,r, t ) < 0, (2.113)
f (r, t ) = ( s2 (t )T (0,r, t ) T t
(0,r, t )) /u (0,r, t ), (2.114)
T (L,r, t ) = T C if u (L,r, t ) 0T z
(L,r, t ) = g(r, t ) if u (L, t ) > 0, (2.115)
g(r, t ) = ( s2 (t )T (L,r, t ) T t
(L,r, t )) /u (L,r, t ). (2.116)
All physical boundary conditionsrequired by the continuous problem are summarisedin Table 2.1. Initial conditions have to be described for all ve variables. One possi- bility is the no-ow steady state given by
T = T H ( T H T C )z/L, u = 0, v = 0, p = 0, T w = T. (2.117)
31
-
7/28/2019 200510289.pdf
38/133
32 Modelling
32
-
7/28/2019 200510289.pdf
39/133
CHAPTER 3
Numerical solution methods for1D equations
In this chapter the numericalmethods for the solution of the resultingsystem of equa-tions in one-dimensional form will be presented. The governing equations are discre-tised using nite difference techniques. The temperature equation is a convection-diffusion equation. We use an implicit scheme for the diffusive term and an ex-plicit scheme with ux limiter for the convective term. The velocity in the one-dimensional case can be found from the constraint equation. Although there is noneed to compute the rst-order pressure in the one-dimensional case, we investigatedifferent pressure-correction algorithms for the momentum and constraint equationsto nd the optimal scheme for our ow problem. It will be used in solving the two-dimensional system. Finally, we explain how more accurate solutions can be obtained
by grid renement. Instead of applying non-uniform locally rened grids, we useseveral uniform grids with different mesh sizes. This renement strategy known aslocal uniform grid renement(LUGR) is examined.
3.1 Velocity and temperature computationThe starting point of any numerical method is the mathematical model, here a set
of partial differential equations, boundary and initial conditions. In chapter 2, section2.3, we derived the nal system of equations for the one-dimensional case
u x
=2 T x 2
+ s1 (t ), (3.1)
T t
= T 2 T x 2
u T x
+ s2 (t )T, (3.2)
s1 (t ) = 1
(A+ P(t )) dP (t )
dt, (3.3)
33
-
7/28/2019 200510289.pdf
40/133
34 Numerical solution methods for 1D equations
s2 (t ) =1
(A+ P(t )) 1
dP (t )
dt, (3.4)
(t ) =1
B (A+ P(t ))1
Pe 1, (3.5)together with the boundary conditions
u (0, t ) = u H (t ) = C(P(t ) + A E pb (t )) , (3.6)T (0, t ) = T H if u (0, t ) 0
u (0, t )T x
(0, t ) = s2 (t )T (0, t ) T t
(0, t ) if u (0, t ) < 0, (3.7)
T (L, t ) = T C if u (L, t ) 0
u (L, t ) T x
(L, t ) = s2 (t )T (L, t ) T t(L, t ) if u (L, t ) > 0
(3.8)
and initial conditionsT (x, 0 ) = T H ( T H T C )
xL
, (3.9)
u (x, 0 ) = s1 (0)x + u H (0). (3.10)For the numerical solution of the equations (3.1), (3.2) one has to choose a suitable
discretisation method, i.e. a method of approximating the differential equations bya system of algebraic equations for the variables at some set of discrete points inspace and time. There are many approaches, but the most important are: the nitedifference method (FDM), the nite volume method (FVM) and the nite elementmethod (FEM). The areas of application for each method follow logically from itsadvantages and disadvantages.
FDM is the oldest method for the numerical solution of partial differential equa-tions, believed to have been introduced by Euler in the 18th century. The startingpoint is an equation in differential form and a grid covering the domain. At each gridpoint, the differentialequation is approximated by replacing its partialderivatives bya combination of nodal values of the unknown function. The result is one algebraicequation per grid node. On structured grids, the FDM is very simple and effective. Itis especially easy to obtain higher-order schemes on structured grids. But FDM is lessefcient on non-structured grids. The restriction to simple geometries is a signicantdisadvantage. Another disadvantage of FDM is that special care has to be taken tocheck the conservation properties.
FVM uses the integral form of the conservation equations as its starting point. The
solution domain is subdivided into a number of contiguous nite control volumes.FVM is called cell-centered if variable values are calculated in the centre of each con-trol volume and vertex-centred if they are calculated at the vertices. Surface and vol-ume integrals are approximated using suitable quadrature formulae. As a result, oneobtains an algebraic equation for each control volume. The FVM can accommodate
34
-
7/28/2019 200510289.pdf
41/133
3.1 Velocity and temperature computation 35
any grid type, so it is suitable for complex geometries. The FVM is relatively sim-ple to understand and implement and all terms that need to be approximated have aclear physical meaning.
FEM is similar to FVM. The domain is divided into a set of discrete volumes ornite elements. For two- dimensional problems these usually are triangles or quadri-laterals. The main feature of FEM is that the differential equations arise from a vari-ational formulation. The solution within each element is approximated by linearcombinations of suitable basis functions such that continuity of the solution acrosselement boundaries is guaranteed. An important advantage of FEM is the ability todeal with arbitrary geometries. The disadvantage, which is shared by any methodthat uses unstructured grids, is that the matrices representing the linearised equa-tions are not as well structured as for regular grids, thus making it more difcult tond efcient solution methods.
When choosing a proper solution method for our problem, we have to keep in mindthe geometry of the domain and the specic nature of the governing equations. Most
pulse tubes have a simple cylindrical geometry, which makes the use of either FDMor FVM attractive. The conservation equations herein are written in differential formwith primitive (non-conservative) variables, so that the FDM is the logical choice.
In the FDM, we introduce a uniform spatial grid{x j = jh,j = 0,...,N x } with gridsize h = L/N x and time levels{t n = n n , n = 0,..., N t } with variable time step n .Velocity and temperature at grid point(x j , t n ) are denoted as u nj and T nj respectively.We decouple the velocity equation from the temperature equation by using velocityvalues from the previous time level.
For the one-dimensional case we nd the velocity from the velocity divergenceconstraint, equation (3.1). The following formulae for the velocity computation have been used
u nj = u nj 1 +
n
h (T nj 1 2T
nj + T
nj + 1 ) + hs 1 (t
n ) j = 1,..., N x 1,
u nN x = u nN x 1 +
n
h (T nN x 2T
nN x 1 + T
nN x 2 ) + hs 1 (t
n ) j = N x ,
u n0 = u nH j = 0,
(3.11)
for every time leveln = 1,2,3,...,N t with u H (t ) given.To solve the convection-dominated temperature equation we have chosen the fol-
lowing approach:
Convection.Sharp resolution of jumps without excessive smearing requires ex-plicit time discretisation and a high-resolution scheme. Diffusion.Explicit schemes lead to stability conditions of the type = O (h ) forthe convection term and = O (h 2 ) for the diffusion term. The last condition
is too severe. One of the possibilities to avoid this restriction is to discretise thediffusion term implicitly.
35
-
7/28/2019 200510289.pdf
42/133
36 Numerical solution methods for 1D equations
The approximation of the convection term depends on the velocity sign, indicatingthe ow direction.
If u nj > 0 , we use the following scheme for the temperature equation
T n + 1j n n T nj
T n + 1j 1 2T n + 1j + T
n + 1j + 1
h 2 n s2 (t n + 1 )T n + 1j =
T nj cnj 1 +
12
(1 cnj ) nj + 12nj + 12
nj 12(T nj T
nj 1 )
j = 2,...,N x 2, n = 0,..., N t 1.
(3.12)
If u nj < 0 , then
T n + 1j n n T nj
T n + 1j 1 2T n + 1j + T
n + 1j + 1
h 2 n s2 (t n
+ 1 )T n + 1j =
T nj cnj 1
12
(1 + cnj ) nj + 12
nj 12
nj 12(T nj + 1 T
nj )
j = 2,...,N x 2, n = 0,..., N t 1,
(3.13)
where cnj is the Courant number,cnj := n u nj /h . The ratio nj + 12 is dened by
nj + 12:=
T nj T nj 1
T nj + 1 T nj
if u ni > 0
T nj + 2 T nj + 1
T nj + 1 T nj
if u ni < 0
, nj 12:=
T nj 1 T nj 2
T nj T nj 1
if u ni > 0
T nj + 1 T nj
T nj T nj 1
if u ni < 0
, (3.14)
and nj 12 := (nj 12
) is the ux limiter. Possible choices are the smooth Van Leerlimiter
() = + | |1 + | |
(3.15)
or the minmod limiter [26, p. 542] dened by
() = max(0, min(, 1 )) . (3.16)
For 0, the limiter function() = 0. This means that in the vicinity of steepgradients, where nj + 12 < 0, nj 12 < 0 , the high-resolution schemes (3.12) and (3.13)reduce to upwind schemes. ComputingT n + 1j with formulae (3.12) and (3.13) requires
values from the neighbouring grid pointsj 2, j 1, j, j + 1, j + 2. For j = 1 andj = N x 1 the standard upwind scheme is used ( () = 0). If the CFL (Courant-Friedrichs-Lewy) stability condition|cnj | 1 or, equivalently,
n h/ maxj | u nj | (3.17)
36
-
7/28/2019 200510289.pdf
43/133
3.2 Pressure correction algorithms for the 1D case 37
is satised, both schemes (3.12) and (3.13) are second-order accurate in space (awayfrom discontinuities) and rst-orderaccurate in time, see [49]. The discretisedbound-ary conditions (3.7), (3.8) are
T n + 10 + n u n0
T n + 11 T n + 10
h n s2 (t n
+ 1 )T n + 10 = T n0 ,
T n + 1N x + n u nN x
T n + 1N x T n + 1N x 1
h n s2 (t n
+ 1 )T n + 1N x = T nN x .
(3.18)
The numerical algorithm is summarized as follows. Assume that the initial tem-perature T 0j and velocityu 0j are given. At time stepn + 1:
1. Estimate maxj | u nj | at the previous time leveland dene n according to the CFLcondition (3.17).
2. Compute the temperatureT n + 1j from (3.12) if u
nj > 0 or from (3.13) if u
nj < 0 ,using T nj and u nj .
3. Compute the velocityu n + 1j via (3.11), usingT n+ 1
j .
3.2 Pressure correction algorithms for the 1D caseIn anticipation to the two-dimensional case, let us consider the system of leading-
order equations but now in combination with the rst-order momentum equation.It has the leading-order pressureP(t ) as a given function of time and the rst-orderpressure p as unknown.
u t + u
u x =
px +
43Re
2 u x 2 , (3.19)
u x
=2 T x 2
+ s1 (t ), (3.20)
T t
= T 2 T x 2
u T x
+ s2 (t )T, (3.21)
(A+ P(t ))B = T. (3.22)In the one-dimensional case there is no need to compute the rst-order pressure, be-cause the constraint equation (3.20) gives us a completely dened velocity eld. Butfor higher dimensions this is not the case.
To deal with the problem of pressure-velocity coupling, we employ the pressurecorrection method. Introduced in 1967 in [10], pressure correction schemes have beenthe topic of research for more than thirty years. One of the most well known andwidely used methods is SIMPLE (Semi-Implicit Method for Pressure-Linked Equa-tions), proposed in [54]. This algorithm was designed for stationary incompressible
37
-
7/28/2019 200510289.pdf
44/133
38 Numerical solution methods for 1D equations
ow problems. Many variations and improvements have been proposed, such asSIMPLER [53], SIMPLEC [11], SIMPLEN [71]. The method can be also extended tocompressible ow computations [16]. In [33] the PISO (Pressure-Implicit with Split-ting of Operators) method was introduced, which especially aimed at solving un-steady ow problems. The SIMPLE and PISO schemes have strong similarities, bothin terms of algorithmic formulation and general methodology. All pressure correc-tion methods start from computing a guess for the velocity eld in thepredictor step,using initial approximations of velocity and pressure. The predictor value of the ve-locity eld typically does not satisfy the velocity constraint equation and is correctedin the corrector step. Since this correction affects the pressure eld, a related pressurecorrection is dened, obtained by requiring that the corrected velocity satises theconstraint. This leads to a Poisson equation for the pressure correction. A whole vari-ety of methods can be formulated by varying the number of predictionand correctionsteps used, see [5].
The main questions to be answered in this section are:
What is a suitable pressure correction algorithm for the low-Mach-number com-pressible unsteady ows? With some imagination many methods can be in-vented to determine thesolution at thenewtime level. Whenmakingourchoicewe keep in mind requirements such as simplicity, stability and accuracy.
How many corrector steps are needed? What are the proper boundary conditions for velocity and rst-order pressure?As was shown in Section 2.3.3, in the one-dimensional problem only one phys-
ical boundary condition for the velocity is needed to dene the velocity eld.Sometimesknowing which physical boundary conditions to impose is notenoughto solve the problem numerically, extra information must be supplied in theform of numerical boundary conditions. These appear to be needed by the nu-merical method whilst not being explicitly given by the physics of the prob-lem. The numerical (soft) boundary conditions depend on grid, discretisationtechnique and solution method. The pressure correction algorithms require two boundary conditions for velocity and two boundary conditions for pressure.
3.2.1 A model problemTo test different pressure correction algorithms we construct a model problem in
which the pressure equation can be easily elaborated. For this purpose an isothermalinviscid ow in an open tube subject to sinusoidal pressure variation is considered.
The domain of interest is a one-dimensional region0 < x < L , whereL is the lengthof the tube. The unknowns are velocityu (x, t ) and hydrodynamic pressurep(x, t ).The system of equations is
t
+ u x
+ u x
= 0, (3.23)
u t
+ u u x
= 1
px
, (3.24)
38
-
7/28/2019 200510289.pdf
45/133
3.2 Pressure correction algorithms for the 1D case 39
with boundary conditions
u (0, t ) = u H (t ) = CP(t ), (3.25)and density and driving pressure given by
(A+ P(t ))B = with P(t ) = sin(t ). (3.26)Substitution of the density, given by (3.26), in the continuity equation (3.23) gives avelocity divergence constraint
u x
= s(t ) with s(t ) = 1(A+ P(t ))
dPdt
. (3.27)
Combining the equations (3.24) and (3.27), we derive
1
p
x= s2 (t ) + s (t ) x + ( u H (t ) + s(t ) u H (t )) . (3.28)
Differentiation of equation (3.28) gives a Poisson equation for the pressure, which can be written as
2 px 2
= (t ) s2 (t ) + s (t ) . (3.29)
The Neumann boundary conditions for the pressure follow directly from (3.28) :
x = 0 :px
= (t ) ( u H (t ) + s(t ) u H (t )) , (3.30)
x = L :px
= (t )L s (t ) + s2 (t ) (t ) ( u H (t ) + s(t ) u H (t )) . (3.31)
Integration of equation (3.28) gives p(t, x ) = (t )
12
s2 (t ) + s (t ) x2 + ( u H (t ) + s(t ) u H (t )) x + F(t ). (3.32)
The system of equations (3.23) - (3.24) denes the pressure up to the unknown func-tion F(t ). To have a unique pressure we x it at one point - at the boundaryx = L. If we setp (t, L ) = 0, the termF(t ) can be found from (3.32) as
F(t ) = (t )12
s2 (t ) + s (t ) L2 + ( u H (t ) + s(t ) u H (t )) L . (3.33)
Formulation of algorithms
All proposed algorithms will use the momentum equation (3.24) and the veloc-ity divergence constraint equation (3.27) for the determination of the pressure andthe velocity eld. Usually the continuity and momentum equation are used to con-struct pressure correction schemes for compressible ows. The explanation is thatthe pressure correction schemes have originally been developed for incompressible
39
-
7/28/2019 200510289.pdf
46/133
40 Numerical solution methods for 1D equations
ows, for which the continuity equation and the constraint equation are identical.For compressible ows, the constraint equation is a combination of the continuityand the energy equations. Pressure correction algorithms constructed with the conti-nuity equation are different from those constructed with constraint equations. In [27],on the basis of stability and accuracy considerations, thecontinuity correction methodswere shown to be inappropriate for low-Mach-number compressible ows.
The system of equations for velocity and pressure can be written in terms of gradand div operators. This enables a convenient extension to higher dimensions.
u t
= u u x
1
grad p, (3.34)
div u = s(t ). (3.35)
Let us construct algorithms for computingp n + 1 , u n + 1 , assuming thatn + 1 is alreadyknown. We use acollocated gridwhere all unknowns are computed at the same gridpoints. The alternative is astaggered gridwhere grid points for different unknownsare staggered with respect to each other. These grids were introduced in the sixtiesfor incompressible ow computation to overcome difculties with pressure-velocitycoupling and the occurrence of oscillations in the pressure (checkerboard instabil-ity). Despite the strong coupling between velocities and pressure, staggered meshschemes have drawbacks. When used with non-uniform grids, the discretisation ismore difcult. This adds considerably to the programming effort and to the compu-tational time, especially when adaptive or multigrid mesh approaches are used.
ALGORITHM 1 prediction step:
First a predictor velocity eldu
is determined by solving the following implicitequation u i u
ni
= H( u i )
1n + 1i
grad( pni ). (3.36)
The operatorH( u i ) stands for the nite-difference representation of the convectiveux uu/x .
correction step: u n + 1i u
ni
= H( u i )
1n + 1i
grad( pn + 1i ). (3.37)
In this step the discretised momentum equation is written foru n + 1i in an explicit
way. Equation (3.37) usesH( u i ) instead of H( u n + 1i ), assuming that the difference isnegligibly small. Subtraction of ( 3.36) from (3.37) gives the equation for the velocity
correction u n + 1i = u i
n + 1i
grad pn + 1i pni . (3.38)
40
-
7/28/2019 200510289.pdf
47/133
3.2 Pressure correction algorithms for the 1D case 41
pressure correction equation:
We substitute (3.38) in the velocity divergence constraint (3.35) so that
div( u n + 1i ) = s(t n+ 1 ) (3.39)
and derive the Poisson equation for the pressure correction
div n + 1i
grad pn + 1i pni = s(t n+ 1 ) div( u i ). (3.40)
ALGORITHM 2 prediction step:
u i u ni
= H( u i )
1n + 1i
grad( pni ). (3.41)
Now we decompose the operatorH( u i ) into two parts
H( u i ) = H ( u i ) + Ani u i ,
where A ni represents the coefcient of the central (i.e. diagonal) element. For mostpractical spatial difference schemesA ni is a nite negative number. Equation (3.36)then becomes
(1 A ni ) u i = u ni + H ( u i )
n + 1i
grad( pni ). (3.42)
correction step:In this scheme the corrector step is partly implicit. The central element is moved to
the left-hand side and treated implicitly. The rest of the operatorH is retained on the
right-hand side where it is treated explicitly. Equation (3.37) becomes(1 A ni ) u
n + 1i = u
ni + H ( u i )
n + 1i
grad( pn + 1i ) . (3.43)
Equation (3.43) usesH ( u i ) instead of H ( u n + 1i ) only in the neighbouring points. Sub-tracting (3.42) from (3.43), the formula for the velocity correction is
u n + 1i = u i
n + 1i
1Bni
grad pn + 1i p ni , (3.44)
Bni = 1 Ani .
pressure correction equation:
div n + 1i
1Bni
grad pn + 1i pni = s(t n+ 1 ) div( u i ). (3.45)
ALGORITHM 3
41
-
7/28/2019 200510289.pdf
48/133
42 Numerical solution methods for 1D equations
This algorithm closely resembles the Issa algorithm from [33], where the correctionstep is performed two times at every time level. The deviation is in the constraintequation, which was not used by Issa. The rst three steps from ALGORITHM 1 arerepeated withp n
+1 replaced byp and u n
+1 replaced byu . prediction step:
u i u ni
= H( u i )
1n + 1i
grad( pni ). (3.46)
rst correction step:
u i = u ni + H ( u i )
n + 1i
grad( p i ). (3.47)
Subtracting (3.46) from (3.47) yields a formula for the velocity correction,
u i
= u i
n + 1igrad ( p
i p n
i) . (3.48)
pressure correction equation:
div( u i ) = s(t n + 1 ), (3.49)
div n + 1i
grad ( p i pni ) = s(t n + 1 ) div( u i ). (3.50)
second correction step:
u n + 1i u ni
= H( u i )
1n + 1
i
grad( pn + 1i ), (3.51)
u n + 1i = u ni + H ( u i )
n + 1i
grad( pn + 1i ). (3.52)
Subtracting (3.47) from (3.52), we nd the velocity correction,
u n + 1i = u i + (H( u i ) H( u i ))
n + 1igrad pn + 1i p i . (3.53)
second pressure correction equation:
div( u n + 1i ) = s(t n+ 1 ), (3.54)
div n + 1i
grad pn + 1i p i = s(t n+ 1 ) div( u i )
h
div (H( u i ) H( u i )) . (3.55)
42
-
7/28/2019 200510289.pdf
49/133
3.2 Pressure correction algorithms for the 1D case 43
Spatial discretisationWe use a collocated grid where the pressure and the other unknowns are dened at
the same grid points. One-sided differences in the approximation of the pressure gra-dient and in the approximation of the divergence operator in the constraint equationprevents problems with checkerboard pressure at the expense of rst-order accuracy.A proof of convergence of this method is given in [14].
ALGORITHM 1 prediction step:
u i u ni
= H( u i )
1n + 1i
pni pni 1
h . (3.56)
We linearise the convective term by using values from the previous time level.
H( u i ) = u ni +
u i u i 1h
u ni u i + 1 u i
h , (3.57)
u ni + = max( u ni , 0), (3.58) u ni = min( u ni , 0). (3.59)
correction step: u n + 1i u
ni
= H( u i )
1n + 1i
pn + 1i pn + 1i 1
h . (3.60)
Subtracting (3.56) from (3.60) yields
u n + 1i = u i h
1n + 1i
(q i q i 1 ) , (3.61)
q i = pn + 1i p
ni . (3.62)
pressure correction equation:
u n + 1i + 1 u n + 1i
h = s(t n + 1 ), (3.63)
h 21
n + 1i + 1[q i + 1 q i ] +
h 2
1n + 1i
[q i q i 1 ] = s(t n + 1 ) u i + 1 u i
h . (3.64)
The above procedure has been applied to all interior pointsi = 1, ..., N x 1. The boundary points are considered separately.
i = 0:At the left boundary a Dirichlet boundary condition for velocity, see (3.25), is given
at every time level u 0 = u
n + 10 = CP(t n
+ 1 ). (3.65)
43
-
7/28/2019 200510289.pdf
50/133
44 Numerical solution methods for 1D equations
The Neumann boundary condition for the pressure correction is derived from theconstraint (3.63),
u n + 11 u n + 10
h = s(tn + 1
) with u n + 1
0 given. (3.66)Substituting (3.61), written ati = 1, gives
u n + 11 = u 1 h
1n + 11
(q 1 q 0 ) , (3.67)
which leads to the following boundary condition
h 21
n + 11[q 1 q 0 ] = s(t n
+ 1 ) u 1 u
n + 10
h . (3.68)
i = N x :
At the right boundary, the predictor velocityu N x is derived from the constraintequation u N x u N x 1 = hs (t
n + 1 ). (3.69)
The pressure correction has a Dirichlet boundary condition at this point
q N x = 0. (3.70)
ALGORITHM 2The same discretisation procedure is applied to ALGORITHM 2. predictor step:The discretised equation (3.42) is
(1 A ni ) u i = u ni + H ( u i )
n + 1i pni p ni 1 . (3.71)
correction step:The discretised equation (3.43) is
(1 A ni ) u n + 1i = u
ni + H ( u i )
n + 1i
pn + 1i pn + 1i 1
h . (3.72)
Subtracting (3.71) from (3.72), the formula for the velocity correction is now
(1 A ni ) u n + 1i u i =
h
1n + 1i
pn + 1i pn + 1i 1 . (3.73)
u n + 1i = u i h
1n + 1i
1Bni
(q i q i 1 ) , (3.74)
q i = p n+ 1
i pni , B
ni = 1 A
ni . (3.75)
44
-
7/28/2019 200510289.pdf
51/133
3.2 Pressure correction algorithms for the 1D case 45
pressure correction equation:
u n + 1i + 1 u n + 1i
h = s(t n + 1 ), (3.76)
h 21
n + 1i + 1
1Bni + 1
[q i + 1 q i ] +
h 21
n + 1i
1Bni
[q i q i 1 ] = s(t n+ 1 )
u i + 1 u ih
. (3.77)
The boundary conditions are the same as in the previous algorithm.
ALGORITHM 3 prediction step:
u i u ni
= H( u i )
1n + 1i
pni pni 1
h . (3.78)
rst correction step:
u i u ni
= H( u i ) 1n + 1i
p i p i 1h
. (3.79)
Subtracting (3.78) from (3.79), the formula for velocity correction is derived
u i = u i h
1n + 1i
(q i q i 1 ) , (3.80)
q i = p i pni . (3.81)
pressure correction equation:
u i + 1 u ih
= s(t n + 1 ), (3.82)
h 21
n + 1i + 1[q i + 1 q i ] +
h 2
1n + 1i
[q i q i 1 ] = s(t n+ 1 )
u i + 1 u ih
. (3.83)
second correction step:
u n + 1i u ni
= H( u i )
1n + 1i
pn + 1i pn + 1i 1
h . (3.84)
After subtracting equation (3.79) from (3.84) we get the following correction for-mula
u n + 1i = u i + (H( u i ) H( u i )) h
1n + 1i
q i q i 1 , (3.85)
q i = pn + 1i p i . (3.86)
pressure correction equation:
u n + 1i + 1 u n + 1i
h = s(t n + 1 ), (3.87)
45
-
7/28/2019 200510289.pdf
52/133
46 Numerical solution methods for 1D equations
0 2 4 6 8 10 12 14 1630
20
10
0
10
20
30
40
x
p r e s s u r e
t=3 /2
t= /2
t=
t=2
(a) pressure
0 2 4 6 8 10 12 14 16 183
2
1
0
1
2
3
x
v e
l o c
i t y
t=
t=3 /2
t= /2
t=2
(b) velocity
Figure 3.1: Hydrodynamic pressure and velocity at timest = /2, , 3/2 and 2 .
h 21
n + 1i + 1[q i + 1 q i ] +
h 2
1n + 1i
[q i q i 1 ] =
s(t n + 1 ) u i + 1 u i
h
h
H( u i + 1 ) H( u i + 1 ) + h
(H( u i ) H( u i )) . (3.88)
ResultsThe performance of the described pressurecorrectionschemes has been tested. The
dimensionless parameter values are those of the pulse tube model, investigated inChapter 5, namely
L = 5.33, A= 6.0, B = 0.17, C= 1.67. (3.89)The numerical solution is computed fromt = 0 to t = 2 on a grid withN x + 1points and with N t time steps. The resulting systems of linear algebraic equationsin the prediction step and in the pressure correction step have been solved using theiterative method BICGSTAB [59]. In combination with a preconditioner (incompleteLU-factorisation) this algorithm is fast and has a rather limited use of memory re-sources.
The hydrodynamic pressure and the velocity at timest = /2, , 3/2 and 2 aregiven in Figure 3.1. At any time the velocity is a linear function of position. Theaccuracy is assessed from the maximum norm of the error in pressureN x = pexact p N x , where p exact is given by equation (3.32). Figure 3.2 indicates
how the errors decay with = 2/N t for xed N x = 100. It helps in estimatingthe optimal time step for each algorithm and also in comparing the accuracy of thedifferentalgorithms. From Figure 3.2 we may conclude that algorithm 2 allows largertime steps and is more accurate, especially for large . The results of numerical testswith xedN x and varyingN t are also presented in Table 3.1 . In Figure 3.3 the error
46
-
7/28/2019 200510289.pdf
53/133
3.2 Pressure correction algorithms for the 1D case 47
0 0.01 0.02 0.03 0.04 0.05 0.06 0.070
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
time step
e r r o r
alg 1alg 2alg 3
Figure 3.2: Error as function of time step for N x = 100 for three algorithms.
as function of time on successfully rened grids withN x = 100 (h = 0.169 ), 200 (h =0.084) and 400 (h = 0.042 ) for all three algorithms is presented. Table 3.2 gives themaximum values of the error for rened grids.
The results of the simulation of the model problem show that
Collocated grids and one-sided differences for the approximation of thegradand div operators produce a robust method which is rst-order accurate inspace and time.
Algorithm 2 has better accuracy and allows larger time steps.
Additional correction steps as in ALGORITHM 3 do not improve the solutionin terms of maximum error in pressure. For the boundary conditions, we use a Dirichlet boundary condition for the ve-locity at the left boundary. The pressure correction has a Neumann condition
algorithm 1 algorithm 2 algorithm 3
N t = 200, = 0.0316 5.19 10 1 3.50 10 1 5.59 10 1
N t = 300, = 0.0209 3.13 10 1 2.69 10 1 3.60 10 1
N t = 500, = 0.0125 2.08 10 1
2.06 10 1
2.24 10 1
Table 3.1: Maximum error in pressure N x , N x = 100 (h = 0.169 ) for the algo-rithms 1, 2, 3 with different .
47