2-2 RNAVの概念 内容見本 PBN / Performanced Based …
6
30 2 G ENERAL PRINCIPLES 2-2-1広域航法(RNAV) と性能準拠型航法 (PBN) 広域航法 ( Area Navigation - RNAV ) では、航空機は自機の位置を GNSS ( GPS 等の衛星及び補強システム ) や DME/DME、INS or IRS 等のセンサーにより緯度・経度で把握することでウェイポイントなどにより構成される任意の経路を航行します。 既存航法は、VOR からのラジアルにより設定される経路や ILS の最終進入経路を飛行するなど航行援助施設の精度に大きく依 存しており、各航行援助施設に応じた受信機を装備し、また、必要に応じて ILS の高カテゴリー運航など求められる要件を満た すことで行われる航法であることからSensor Based Navigationと呼ばれます。一方、RNAVは、原則として、進入や巡航のフェー ズ、空港周辺のフェーズなど飛行フェーズごとに航空機が安全に航行するために必要となる航法の精度を、例えば出発方式で あれば「全飛行時間中少なくとも 95% は± 1nm の範囲にあること」のように定め、その精度に応じて必要となるセンサーや航 空機の要件、乗組員の訓練の要件などが規程される航法です。このように、特定の経路および空域において必要とされる運航 上の要件が規程される航法を Performanced Based Navigation - PBN ( 性能準拠型航法 ) と呼びます。この Performanced Based Navigation の基となっているのが ICAO Doc9613 PBN manual であり、国内では RNAV に係る Manual となる RNAV 航行の許可 基準及び審査基準、飛行方式設定基準などへ反映されています。これらの基準では、PBN に基づいて行う運航で必要な航法の精 度と付随する航空機及び乗務員の一連の要件を航法仕様として定めています。 なお、全ての RNAV による飛行方式がこの PBN に基づいているのではなく、Radar 空港において設定されている RNAV 進入 ( PBN に基づく RNP 進入との相違については、本書「8-1RNAV による進入方式の種類」参照 ) や飛行方式設定基準改正第 8 号 の適用段階では ICAO において PBN に基づく航法仕様の開発中となっている SBAS APV や GBAS による進入などがあります。 2-2RNAV の概念 《基準参照パラグラフ》 第Ⅲ部第 1 編第 1 章 1.1総則 《参考文献�規則等》 PBNManualVol. Ⅱ 2-2-2航法仕様の種類と飛行方式 広島空港の方式図例 RJOA MARCO ONE DEP では航法仕様として RNAV1 が適用されています。同 空港の STAR の方式図例 RJOA MISEN ARR においても同様に RNAV1 の航法仕様が適用されています。 一方、同じく出発方式の方式図例 RJDC HIMESHIMA ONE DEP では ( Basic )RNP1 ※ 1 が航法仕様と して適用された方式となっています。航法仕様と飛行方式の関係は、例えば RNAV1 であれば SID と いったように、出発方式や到着経路、進入方式等の各方式と航法仕様は一対をなしてはおらず、1 つ の航法仕様は複数の飛行フェーズの方式に用いられることがあり、逆に、出発方式等 1 つのフェー ズの方式であっても異なる航法仕様が適用されている場合があります。飛行方式設定基準には、航法 仕様ごとに適用される飛行フェーズが定められており、例えば、航法仕様「RNAV5」であれば、エ ンルートに適用され、また、「RNP1」であれば、SID、STAR 及び計器進入方式の初期及び中間進入 に適用されると定められています。 ※ 1 航 法 仕 様「Basic RNP1」 は飛行方式設定基準第 7 号ま で用いられた仕様であり、改正 第 8 号において当該航法仕様 は「RNP1」となりました。本 書 で は、Basic RNP1 の 方 式 図 例等を RNP1 のものと同義とし て取扱って説明をしています。 A RNP RNP4 ? RNP2 RNAV1 SID RNAV5 Performance-based Navigation (PBN) Manual International Civil Aviation Organization Approved by the Secretary General and published under his authority Fourth Edition - 2013 Doc 9613 AN/937 31 《 方式図例 RJDC/HIMESHIMA ONE DEP 》 《 方式図例 RJOA/MARCO ONE DEP 》 《 方式図例 RJOA/MISEN ARR 》 WPT WPT DME DME 航空機はセンサーにより位置を推測 GNSS ( GPS 等+補強 System ) DME/DME INS or IRS etc 飛行技術等により飛行しようとする経路からズレを生じる 必要な航法の精度と付随する航空機 及び乗務員の一連の要件を決める 航法仕様 PBN/PerformancedBasedNavigation の概念 SID と STAR の異なるフェーズの方式だが 航法仕様は同じ RNAV1 となっている 同じ SID の方式だが航法仕様は RNAV1 と ( Basic )RNP1 で異なっている ➡ [ 平面図 ] [ 立体図 ] WPT GPS 航法装置が推測する自機の位置 実際の自機の位置 ズレがある 求められる航法の精度がある 航法の精度に影響する ➡ ➡ GPS GPS N34°56.78' E134°56.78' 内容見本
Transcript of 2-2 RNAVの概念 内容見本 PBN / Performanced Based …

30 2 G e n e r a l p r I n c I p l e s
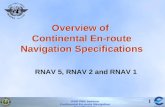
2-2-1����広域航法�(�RNAV�) と性能準拠型航法 (�PBN�) 広域航法 ( Area Navigation - RNAV ) では、航空機は自機の位置を GNSS ( GPS 等の衛星及び補強システム ) や DME/DME、INS or IRS 等のセンサーにより緯度・経度で把握することでウェイポイントなどにより構成される任意の経路を航行します。 既存航法は、VOR からのラジアルにより設定される経路や ILS の最終進入経路を飛行するなど航行援助施設の精度に大きく依存しており、各航行援助施設に応じた受信機を装備し、また、必要に応じて ILS の高カテゴリー運航など求められる要件を満たすことで行われる航法であることから Sensor Based Navigation と呼ばれます。一方、RNAV は、原則として、進入や巡航のフェーズ、空港周辺のフェーズなど飛行フェーズごとに航空機が安全に航行するために必要となる航法の精度を、例えば出発方式であれば「全飛行時間中少なくとも 95% は± 1nm の範囲にあること」のように定め、その精度に応じて必要となるセンサーや航空機の要件、乗組員の訓練の要件などが規程される航法です。このように、特定の経路および空域において必要とされる運航上の要件が規程される航法を Performanced Based Navigation - PBN ( 性能準拠型航法 ) と呼びます。この Performanced Based Navigation の基となっているのが ICAO Doc9613 PBN manual であり、国内では RNAV に係る Manual となる RNAV 航行の許可基準及び審査基準、飛行方式設定基準などへ反映されています。これらの基準では、PBN に基づいて行う運航で必要な航法の精度と付随する航空機及び乗務員の一連の要件を航法仕様として定めています。 なお、全ての RNAV による飛行方式がこの PBN に基づいているのではなく、Radar 空港において設定されている RNAV 進入( PBN に基づく RNP 進入との相違については、本書「8-1RNAV による進入方式の種類」参照 ) や飛行方式設定基準改正第 8 号の適用段階では ICAO において PBN に基づく航法仕様の開発中となっている SBAS APV や GBAS による進入などがあります。
2-2����RNAV の概念
《基準参照パラグラフ》第Ⅲ部第 1編第 1章1.1��総則
《参考文献�規則等》PBN�Manual�Vol. Ⅱ
2-2-2����航法仕様の種類と飛行方式 広島空港の方式図例 RJOA MARCO ONE DEP では航法仕様として RNAV1 が適用されています。同空港のSTARの方式図例 RJOA MISEN ARR においても同様にRNAV1の航法仕様が適用されています。一方、同じく出発方式の方式図例 RJDC HIMESHIMA ONE DEP では ( Basic )RNP1 ※ 1 が航法仕様として適用された方式となっています。航法仕様と飛行方式の関係は、例えば RNAV1 であれば SID といったように、出発方式や到着経路、進入方式等の各方式と航法仕様は一対をなしてはおらず、1 つの航法仕様は複数の飛行フェーズの方式に用いられることがあり、逆に、出発方式等 1 つのフェーズの方式であっても異なる航法仕様が適用されている場合があります。飛行方式設定基準には、航法仕様ごとに適用される飛行フェーズが定められており、例えば、航法仕様「RNAV5」であれば、エンルートに適用され、また、「RNP1」であれば、SID、STAR 及び計器進入方式の初期及び中間進入に適用されると定められています。
※ 1 航法仕様「Basic�RNP1」は飛行方式設定基準�第 7 号まで用いられた仕様であり、改正第 8 号において当該航法仕様は「RNP1」となりました。本書では、Basic�RNP1 の方式図例等を RNP1 のものと同義として取扱って説明をしています。
A RNP
RNP4
?
RNP2RNAV1
SIDRNAV5
Performance-basedNavigation (PBN)Manual
International Civil Aviation Organization
Approved by the Secretary Generaland published under his authority
Fourth Edition - 2013
Doc 9613AN/937
31
《 方式図例 RJDC/HIMESHIMA ONE DEP 》《 方式図例 RJOA/MARCO ONE DEP 》 《 方式図例 RJOA/MISEN ARR 》
WPT
WPT
DME
DME
航空機はセンサーにより位置を推測
GNSS ( GPS 等+補強 System )DME/DMEINS or IRSetc
飛行技術等により飛行しようとする経路からズレを生じる
必要な航法の精度と付随する航空機及び乗務員の一連の要件を決める
航法仕様
PBN�/�Performanced�Based�Navigation の概念
SID と STAR の異なるフェーズの方式だが航法仕様は同じ RNAV1 となっている
同じ SID の方式だが航法仕様は RNAV1と ( Basic )RNP1 で異なっている
➡
[ 平面図 ]
[ 立体図 ]
WPT
GPS
航法装置が推測する自機の位置実際の自機の位置 ズレがある
求められる航法の精度がある
航法の精度に影響する
➡
➡
GPS
GPSN34°56.78'E134°56.78'
内容見本

78 4 d e p a r t u r e p r o c e d u r e s
4 Departure procedures
《基準参照パラグラフ》第Ⅰ部第 3編第 1章序論
パイロットが計器飛行方式により出発する場合、定められた飛行の方式に従い航行することが求められており、この方式として標準計器出発方式 ( SID : Standard Instrument Departure ) 及び転移経路 ( Transition ) が設定されています。これら出発方式は離陸直後からエンルートセグメントへ接続するまでの障害物間隔を確保するものであり、計器飛行による出発が行われる飛行場の滑走路ごとに設定・公示されます。 出発方式は可能な限り全ての航空機区分に適用できるよう設計されますが、特定の航空機区分に限定せざるを得ない場合には出発方式図中に適用可能な航空機区分が明記されます。また、飛行方式設計基準では全発動機作動等、正常運航を想定しており、運航者が設定する異常時・緊急時用コンティンジェンシー方式の性能要件への適合は運航者の責務とされています。
《基準参照パラグラフ》第Ⅰ部第 3編第 1章2.1��出発方式の設計
4-1���出発方式設計の原則
《基準参照パラグラフ》第Ⅰ部第 3編第 2章2.2��設計の原則
4-1-1���出発方式はどこから開始されるのか 飛行方式設定基準では、出発方式の起点は滑走路離陸末端 ( DER : Departure End of Runway ) とされており、DER を起点として各出発方式の設定が行われています。この DER は滑走路末端またはクリアウェイが設置されている場合にはクリアウェイ末端となりますが、現在、国内にクリアウェイは設置されていないため滑走路末端が DER となります。一方で出発方式の区域設計の起点は DER とは限りません。RJSN NIIGATA REVERSAL SIX DEPARTURE のRWY04/10からの方式は、" Turn left ..."とされ、離陸後直ちに旋回を行う出発方式となっています。このように離陸後直ちに旋回を伴う場合、設計上は旋回開始に先立ち航空機は滑走路 ( DER標高 ) 上方少なくとも120m ( 394ft ) の高さに到達するまで滑走路の方位を維持した後に旋回を開始すると想定されています。また、RWY28 からの出
《基準参照パラグラフ》第Ⅰ部第 3編第 2章2.3�出発方式の起点
《参考文献�規則等》ICAO�ANNEX141.1��Definitions��"Clearway"
もう旋回 !?
発のように、高度 700ft まで RWY HDG を維持した後に旋回する方式の場合、航空機は設定高度に達した時点で旋回を開始することが想定されています。このように、離陸後、所定の高度での旋回が想定される方式では、航空機が旋回開始高度に達する地点は航空機の離陸浮揚地点及び上昇性能などにより異なるため、滑走路の上空つまり出発方式の開始点である DER の手前で旋回開始高度に達し旋回を開始することもあると考えられます。したがって、離陸後直ちに ( DER 標高上 120m の高さに達した時点で ) 旋回を開始する場合や指定高度により旋回を開始する場合には、方式図中に早期旋回を禁止する注記がない限り、DER 手前における旋回を保護するため、滑走路の起点から 600m の地点から保護区域の設計を行います。一方で、右の方式図例 RJOA HONGO REVERSAL THREE DEPARTURE での " Climb RWY HDG to HGE 4.6DME (4.0NM FM DER), turn left..." や " Climb on HDG270° to HGE 5.0DME (4.0NM FM DER), turn right..."、また、方式図例 RJBE KOBE THREE DEPARTURE での " Climb via KCE R271 to MAIKO” のように、離陸後、指定される地点まで 15°を超える旋回を伴わない方式の場合、保護区域は DER から開始されます。
79
出発方式設計の原則・出発が行われる滑走路ごとに設定・公示される・特に記載がない限り全ての航空機区分に適用される・全発動機作動を前提としている → 臨界発動機停止等、異常事態及び緊急事態におけるコンティンジェンシー方式の設定は運航者の責務となる。
DER
《 方式図例 RJOA/HONGO REV THREE DEPARTURE 》
出発方式出発方向
《 方式図例 RJSN/NIIGATA REVERSAL SIX DEPARTURE 》
保護区域旋回を伴わない方式指定旋回点で旋回を行う方式
↑ DER 手前での旋回は想定されない
指定高度により旋回を行う方式
離陸後直ちに旋回を行う方式→ 航空機は、DER 標高上方 120m ( 394ft )に達するまで滑走路の方位を維持すると仮定
➡
DER:離陸に適切であると公示された区域の末端 = 滑走路末端 ( 基準ではクリアウェイを含むが国内にはないため )
600m
DER
保護区域離陸後直ちに旋回を行う方式及び指定高度で旋回を行う方式では、DER 手前においての旋回を保護するため、保護区域は滑走路の起点から 600m の地点にて開始される。
出発方式
出発方向
《 方式図例 RJBE/KOBE THREE DEPARTURE 》
旋回を伴わない方式
指定旋回点で旋回を行う方式
➡

184 7 p r e c I s I o n a p p r o a c H p r o c e d u r e s
ILS 施設諸元 ILS を構成する施設には、滑走路中心線への誘導コースを示す LOC ( localizer ) 及び通常3°となる降下パスを示す GS ( glide slope ) に加えて、航空機に最終進入コース上の位置を知らせるためのマーカービーコンがあります。このマーカービーコンには、原則として所定の高度で進入してきた航空機がグライドパスと会合する地点付近に設置されるアウターマーカー ( OM )、CAT Ⅰ ILS進入方式の DA/DH を示すミドルマーカー ( MM )、また、CAT Ⅱ ILS 進入方式にあってはグライドパス上の DH を示す地点に設置されるインナーマーカー ( IM ) があります。このうち、OM 及び MM に代わって ILS に併設される DME によってこれらの位置が示されることがあります。 ILSの性能及び構造については、LOCや GS、マーカービーコン等、各施設としての要件が航空法施行規則99条 6に示されています。施行規則に規定されている ILS の性能及び構造に関する事項及び機内計器の指示など関連する事項のうち、LOC 及び GS について図示しましたので、規則と照らし合わせてご覧ください。
《参考文献�規則等》航空法施行規則第九十九条六ILS の性能及び構造
GS
GS ANT
コース幅と機内計器指示
[ 関連条項:規則第 99 条 6 ハ ( 16 ) ほか ]
グライドスロープの有効範囲
[ 関連条項:規則第 99 条 6 ハ ( 8 ) ほか ]
8°
8°
10NM ( 方式で 10NM を超え必要とされる場合はその距離 )
90Hz 強
150Hz 強GS ANT
グライドスロープスケール及びポインター
R
Rグライドパスと滑走路との交点
θ1.75 θ
(
0.45 θ
θはグライドパスと水平
面とのなす角度
平面図
縦断面図
0.0875DDM
0.0875DDM
約 1.44°
《基準参照パラグラフ》第Ⅱ部第 1編第 1章1.1.3�標準的条件
185
90Hz と 150Hz の変調度の差 ( DDM/Difference in Depth of Modulation )によりコースを機上装置に表示
GP
point E CD B
THR
point A
100ft
End of RWY
2000ft3000ft 3500m
4NM
CAT ⅠCAT ⅡCAT Ⅲ
) 2°) 7°
LOCローカライザーの有効範囲
コース上では 90Hz と 150Hz の変調度が同じであり、コース左側では 90Hz が強く、右側では 150Hz が強い。
コース幅と機内計器指示
0.155DDM
0.155DDM
150Hz 強90Hz 強
コース幅
700ft ( 210m )
LOC ANT
THR
[ 関連条項:規則第 99 条 6 ロ ( 16 ) ほか ] [ 関連条項:規則第 99 条 6 ロ ( 14 ) ほか ]
施行規則にて用いられるILS 施設の性能の構造を示すためのポイント ( 地点 )
LOC の経路方向など基本的な性能要件が求められる範囲
[ 関連条項:規則第 99 条 6 ロ ( 6 ) ほか ]
LOC ANT 25NM
18NM 10°
10°
35°
35°
GP と RWY との交点 THR 標 高 + 2000ft ま た は、中間及び最終進入区域における最高点標高+ 1000ft の高
い方
LOC ANT サイト高+ 6250ft
8.4NM
ローカライザースケール及びポインター
滑走路末端における ILS セクター幅は 210m例えば、LOC アンテナが滑走路手前 250mの地点に設定されている場合、滑走路長 2500m → LOC コース幅 約 4.4°滑走路長 4000m → LOC コース幅 約 2.8°

208 8 r n a v a r r I v a l a n d a p p r o a c H p r o c e d u r e s
8-1���RNAV による進入方式の種類
8 RNAV arrival and approach procedures
方式図例 RJSK RNAV ( GNSS ) RWY10 は、PBN( 性能準拠型航法 ) による飛行方式であり国の定める RNAV 航行の許可基準及び審査要領に基づく航法精度を指定する RNAV による進入方式です。この進入方式は飛行方式設定基準において RNP 進入として扱われています。一方、方式図例 RJSS RNAV ( GNSS ) Z RWY09 は、PBN によらない RNAV 進入となります。これら2方式の相違点として、PBNによるRNP進入では方式図中に航法精度要件"RNP0.3 required"の注記がされます。一方、PBNによらないRNAV進入はレーダー管制の行われている飛行場に設定されるため、方式図中に ”RADAR service required" の注記がされています。 方式図例 RJSK RNAV ( GNSS ) RWY10 では、水平方向ガイダンスが設定される LNAV 方式に加えて、滑走路末端上の基準点高 ( RDH ) から気圧高度に基づく垂直ガイダンスが設定される APV/Baro-VNAV 方式 ( APV / Approach procedure with vertical guidance : 垂直方向ガイダンス付き進入方式 ) が設定されています。この他、RNAV による進入方式としては、方式図例 RJSR RNAV( RNP )Y RWY29 のように、航法誤差が最小で 0.1NM となるような航法精度、その他航法性能及び航法機能要件が定められた特別許可に基づく進入方式の RNP AR 進入方式があります。この RNP AR 進入方式では最終進入セグメントにおいて RF( Radius to Fix ) レグが用いられることがあります。また、地上送信装置からの補正情報による補強システムを用いた GBAS 精密進入方式、衛星型送信機からの補強情報を用いた SBAS を用いた APV Ⅰ / Ⅱ進入方式などがあります。これら、RNP AR 進入方式、GBAS 精密進入方式、SBAS APV Ⅰ / Ⅱ進入方式については、保護区域の設計や障害物との間隔の設定などの基準の多くは独自のものが多くなっています。
《基準参照パラグラフ》第Ⅲ部第 6編第 3章RNP 進入3.1�総則
《基準参照パラグラフ》第Ⅲ部第 1編第 1章RNAV の概念1.1�総則
8-2���到着方式 RNAV 飛行方式による到着方式は主に RNAV1 または (Basic) RNP1 の航法仕様により設定されています。RNAV 1と RNP1 の航法仕様の違いによる方式への主な相違点は、RNAV1 では DME/DME/IRU、GNSS による位置アップデートを想定していますが、RNP1では GNSS による位置アップデートが想定されています。このため、RNAV1 による方式では Critical DME 及び DME GAP に係る情報が示されています。また、区域幅を比較するとターミナルフェーズとなる空港から 30NM 以内では同じですが、30NM 以遠においては XTT が異なることから、区域半幅は RNAV1 では 5.0NM なのに対して RNP1 では 3.5NM と異なっています。方式図例 RJTT ARLON ARRIVAL は RNAV1の航法仕様により設定された方式であり、保護区域は右ページの図のように、30NM以遠において5.0NMの区域半幅を有し、その後、ノミナル経路が飛行場標点から 30NM の地点において後続セグメントの XTT の 1.5 倍 ( = 1.5NM ) に先行セグメントの BV ( = 2.0 ) を加えた区域半幅 ( = 3.5NM ) を有し、30°の角度で先行セグメントの区域半幅 5NM から後続セグメントの区域半幅 2.5NM へと収束する区域と推測されます。いずれの航法仕様により設定された到着セグメントについても直線部分にあっては区域外側半分が二次区域となる一般原則が適用され、一次区域における最小障害物間隔は300m ( 984ft )となっています。
《基準参照パラグラフ》第Ⅲ部第 3編第 2章到着及び進入方式
209
《 方式図例 RJSK/AKITA RNAV ( GNSS ) RWY10 》
《 方式図例 RJTT/TOKYO ARLON ARRIVAL 》
ADDUM
AWARD
ARLON
PBN による RNP 進入 PBN によらない RNAV 進入
T 型の初期進入
Baro-VNAV 方式に係る最低気象条件
LNAV( 非精密進入 ) に係る最低気象条件
《 方式図例 RJSR/RNAV( RNP ) Y RWY29 》
最終進入セグメントにおいて、RF レグが用いられることがある
RNP 値が最小 0.1 となる場合がある
推測される区域図2.5NM
30°
5.0NM
飛行場標点から30NM の地点
RNP0.3 の航法精度が求められる
RNP 進入 ( RNAV 進入 ) の方式には、LNAV 進入に加えて、APV/Baro-V NAV 進入が含まれる場合がある
RNAV 到着経路
(Basic) RNP1 ⇒ GNSS requiredRNAV1 ⇒ DME/DME or GNSS required RADAR service required
1.DME/DME RNP0.3 not authorized2.RNP0.3 required3.GNSS required
横断面図平面図
二次区域一次区域
全幅の 1/4
RNP AR 進入方式1.DME/DME not authorized2.RADAR service required3.GNSS required
RNAV による進入復行に加え、既存航法による進入復行方式が示される
二次区域
《 方式図例 RJSS/RNAV( GNSS ) Z RWY09 》
➡
MOC300m ( 984ft )
3.5NM
区域半幅 = 1.5 × XTT+ BV
XTT=1.0BV=2.0
XTT=1.0BV=1.0
XTT=2.0BV=2.0

244 9 a e r o d r o m e o p e r a t I n G m I n I m a
9-3���計器進入方式の最低気象条件等 計器進入を行う場合、パイロットは目的飛行場の気象状態が公示、 または自己の進入を継続することができる最低気象条件を満さない場合には進入を開始 / 継続することはできません。したがって、パイロットは計器進入開始前に最低気象条件を満たさない場合、管制機関または飛行場アドバイザリー業務実施機関にその旨通報するとともに、待機または代替飛行場へのクリアランスを要求しなければなりません。 計器進入開始後、最終進入フィックス、アウターマーカー、飛行場標高から 1000 フィートの地点、または、その他、特に認められた地点において進入継続の可否の判断を行い最低気象条件を満たさなければ進入を継続することはできません。この地点において進入継続が可能と判断したのちに飛行場の気象状態が悪化し最低気象条件を満たさなくなった場合であっても進入を継続することは可能です。ただし、パイロットが定められた進入限界高度 / 高未満へ着陸のための進入を行うことができるのは進入限界高度 ( DA/H または MDA/H ) において適切な目視物標を視認し、継続的に識別の維持が可能である場合のみとなります。 本章第 3 節では、計器進入方式に定められている、最低気象条件、進入限界高度 / 高、目視物標について各方式ごとに説明します。初めに AIP に公示されている進入方式の最低気象条件の記載例を右ページに示します。
《参考文献�規則等》AIP�ENR�1.52.2.1��進入許可
《参考文献�規則等》航空法施行規則第 189 条第 3項空港等付近の航行方法
《参考文献�規則等》AIP�AD�1.16.9.1.4��最低気象条件等
《�復習�:OCH�と DA/H、MDA/H との関係について�》�( 本書「6-5-3 障害物間隔高度 / 高 ( OCA/H )」参照 )OCA/H、DA/H、MDA/H の定義: ・決心高度/高 ( DA/H – Decision altitude/height ): 精密進入または垂直方向ガイダンス付き進入において、進入継続のための必要目視物標をその到達時に視認できない場合にあっては進入復行を開始しなければならない高度/高。注 ― 決心高度 ( DA ) は平均海面を基準とし、決心高 ( DH ) は滑走路末端標高を基準とする。 ・最低降下高度/高 ( MDA/H – Minimum decent altitude/height ): 非精密進入及び周回進入において定める、必要な目視物標を視認することなくそれ未満へ降下してはならない高度/高。注 ― 最低降下高度 ( MDA ) は平均海面を基準とする。非精密直線進入に係る最低降下高 ( MDH ) は飛行場標高 ( 滑走路末端標高が飛行場標高から2m ( 7ft ) 減じたレベル未満の場合にあっては当該滑走路末端標高 ) を基準とする。周回進入に係る最低降下高は飛行場標高を基準とする。 ・障害物間隔高度/高 ( OCA/H – Obstacle clearance altitude/height ) :関係する障害物間隔基準に従い設定した、最低高度若しくは滑走路末端標高または飛行場標高を基準とする最低高。
⇒ OCA/H は適切な障害物間隔の確保のために設定される値です。一方、精密進入方式で用いられる DA/H や非精密進入で用いられる MDA/H は障害物間隔に加え地上 / 機上機器の特性や運航乗務員の資格、航空機特性等を考慮し設定されます。OCA/H は DA/H、MDA/H を決定する構成要素の1つになります。ICAO では国が OCA/H を公示し、これを基に運航者が MDA/H、DA/H を定めることを想定して PANS-OPS 第Ⅱ巻が定められています。日本のように国が DA/H、MDA/H を公示する場合、運航者が適用する DA/H、MDA/H は国により公示された値以上でなければなりません。
245
Missed�APCH�climb�gradient�MNM��3.3%�MINIMA������������THR�elev.�21 ����� AD�elev.19
CATCIRCLING
MDA(H) RVR/CMV MDA(H) VISA
440(421)1500 520(501) 1600
BC 1800 650(631) 2400D 2000 3200
Circling�to�NORTH�side�of�RWY�only.MINIMA�with�Missed�APCH�climb�gradient�of�2.5%�are�not�established
非精密進入方式 (�VOR,�NDB�) の最低気象条件
飛行場標点標高 ( FT )滑走路末端標高 ( FT )
進入復行最低上昇勾配 ( % )航空機区分
周回進入の方向限定 地上視程 ( m )
滑走路視距離/地上視程換算値 ( m )( 直線進入 ) 進入限界高度:最低降下高度 ( 高 )( FT )
( 周回進入 ) 進入限界高度:最低降下高度 ( 高 )( FT )
進入限界高度:決心高度 ( 高 )( FT )
決心高度 ( 高 ) における電波高度計値 ( FT )
MINIMA������������THR�elev.�15 ����� AD�elev.12
CATCAT�Ⅱ CAT�Ⅰ LOC CIRCLING
DA(H) RA RVR DA(H) RVR/CMV MDA(H) RVR/CMV MDA(H) VISA
115(100) 100 350 215(200) 550 520(508)
1000520(508)
1600B
1200C 2400D 1600 580(568) 3200
Circling�to�NORTH�side�of�RWY�only.
ILS�or�LOC�進入方式の最低気象条件《�最低気象条件公示記載例��》
地上視程 ( m )進入限界高度:最低降下高度 ( 高 )( FT )
CAT- Ⅰ ILS 進入方式CAT- Ⅱ ILS 進入方式 ローカライザー単独進入 周回進入
滑走路視距離/地上視程換算値 ( m )
滑走路視距離 ( m )
AIP�ENR�1.5��待機、�進入および出発方式�2.2.1.4 操縦士は、 計器進入開始前において、 目的飛行場の気象状態が公示、 又は自己の進入を継続することができる最低気象条件を満さない場合は、 管制機関又は飛行場アドバイザリー業務実施機関にその旨通報するとともに、 待機又は代替飛行場へのクリアランスを要求しなければならない。
航空法施行規則第 189 条�第3項�計器飛行方式により着陸しようとする場合であって次に揚げるときは、着陸のための進入を継続しないこと。イ 進入限界高度よりも高い高度の特定の地点を通過する時点において空港等における気象状態が当該空港等への着陸のための進入を継続することができる 最低の気象条件未満であるとき。ロ 進入限界高度以下の高度において目視物標を引き続き視認かつ識別することによる当該航空機の位置の確認ができなくなったとき。
RNAV/RNP 進入方式の最低気象条件
Missed�APCH�climb�gradient�MNM��4.2%�MINIMA������������THR�elev.�151 ����� AD�elev.112
CAT LNAV/VNAV LNAV CIRCLINGDA(H) RVR/CMV MDA(H) RVR/CMV MDA(H) VIS
A
600(449)
900
600(488)
1000 600(488) 1600B 1000 1200C 640(528) 2400D 1400 1600 700(588) 3200
Circling�to�NORTH�side�of�RWY�only.MINIMA�with�Missed�APCH�climb�gradient�of�2.5%�are�not�established
進入限界高度:決心高度 ( 高 )( FT ) 最低降下高度(高 )( FT )
水平方向及び垂直方向のガイダンスを利用する RNAV/RNP 進入水平方向のガイダンスを利用する RNAV/RNP 進入

256 9 a e r o d r o m e o p e r a t I n G m I n I m a
9-3-3���RNAV による進入方式に係る最低気象条件非精密進入方式 (�LNAV�) に係る最低気象条件 右の方式図例 RJFU RNAV ( GNSS ) RWY14 では非精密進入方式に位置づけられる LNAV 進入及び APV 進入方式に位置づけられるBaro-VNAV 方式に係る最低気象条件が示されています。このうち、LNAV 進入に係る最低気象条件は、既存航法による非精密進入方式と同じです。したがって、進入限界高度は区域内における障害物との間隔から導かれる OCA、または、MDH 下限値に MDA の基準地点の標高を加えた値の大きい方となります。この MDA の基準地点に係る基準も非精密進入同様で、基準地点は飛行場標高、ただし滑走路末端標高が飛行場標高より 2m ( 7ft ) を超えて下回る場合にあっては滑走路末端標高となります。また、RNAV 進入のMDH 下限値は 250ft となっています。方式図例 RJFU RNAV ( GNSS ) RWY14 の LNAV 進入についてみると、MDA は 290ft となっており、区域内の障害物との間隔から設定された値と推察されます。また、RJFU RWY14 の滑走路末端標高は 14ft、飛行場標高は8ft となっており、MDA の基準は飛行場標高となるため、MDH は 290 - 8 = 282ft となっています。この MDH に対応した最低気象条件が表Ⅴ -1-3-2b より導かれます。APV/Baro-V�NAV 進入方式に係る最低気象条件 方式図例 RJFU RNAV ( GNSS ) RWY14 では LNAV 進入に係る最低気象条件に加え、Baro-VNAV 方式に係る最低気象条件が公示されています。これらは無関係ではなく、Baro-VNAV に係る DA は LNAV の MDA 以上とされているため、多くの方式で Baro-VNAV方式に係る DA は LNAV 進入の MDA と一致しています。ただし、DH は滑走路末端標高を基準としており、この点は LNAV 進入の基準とは異なっています。このように、Baro-VNAV 方式の DA は、対応する LNAV 進入の MDA、または Baro-VNAV 方式について算出された障害物間隔高度 ( OCA ) のうち高い高度となっています。なお、DH の下限値は LNAV 進入の MDH 同様 250ft であり、また、最低気象条件はこの DH を MDH と読み替え非精密進入と同じ基準により設定されています。例えば、方式図例 RJFU RNAV ( GNSS ) RWY14 では、LNAV 進入と Baro-VNAV 方式の MDA と DA は一致していますが、LNAV 進入の基準地点が飛行場標点の標高であるのに対して、Baro-VNAV の DH は滑走路末端標高 14ft が基準となるため、DH = 290 - 14 = 276ft となっています。RNP�AR 進入方式に係る最低気象条件 RNP AR 進入方式に係る最低気象条件等は、Baro-VNAV に係る基準に基づき設定されています。したがって、RNP AR 進入について算出された最小障害物間隔高度 ( OCA ) を DA として、滑走路末端標高を基準として DH が定まります。なお、DH は 250ft が下限値となっています。また、RNP AR 進入の最低気象条件は非精密進入と同様の RVR または CMV により灯火区分に応じた表Ⅴ -1-3-2a から 2d に示されています。例えば、方式図例 RJOK RNAV(RNP) Z RWY014 では、RNP 値に応じた最低気象条件が定められており、このうち、RNP0.14 に係る DH は 300ft であり、また、RJOK RWY14 に係る灯火区分はインターミディエット・ファシリティとなるため、表Ⅴ -1-3-2b からカテゴリ C 及び D の最低気象条件 1400m 及び 1600m が導かれています。
《�基準参照パラグラフ�》第Ⅲ部第 6編第 5章5.8��最低気象条件
《基準参照パラグラフ》第Ⅴ部第 7章APV�/�Baro-VNAV の最低気象条件
《基準参照パラグラフ》第Ⅲ部第 6編第 3章3.5��最低気象条件
257
表Ⅴ -1-3-2b 非精密進入方式に係る RVR/CMV ( インターミディエット・ファシリティ )航空機区分
MDHA B C D
250 - 299 ft 1000m 1100m 1200m 1400m300 - 449 ft 1200m 1300m 1400m 1600m450 - 649 ft 1400m 1500m 1600m 1800m650 ft 以上 1500m 1500m 1800m 2000m
《 方式図例 RJFU/NAGASAKI RNAV ( GNSS ) RWY14 》
《 方式図例 RJOK/KOCHI RNAV(RNP) Z RWY014 》
表Ⅴ -1-3-2b 非精密進入方式に係る RVR/CMV ( インターミディエット・ファシリティ )航空機区分
MDHA B C D
250 - 299 ft 1000m 1100m 1200m 1400m300 - 449 ft 1200m 1300m 1400m 1600m450 - 649 ft 1400m 1500m 1600m 1800m650 ft 以上 1500m 1500m 1800m 2000m
非精密進入方式に係る MDA は、次のうち最も高い高度を、10ft 単位の倍数となる高度に切り上げたものa) 当該進入方式について算出された各航空機区分別の障害物間隔高度 ( OCA )b) MDH 下限値 ( LNAV 進入では 250ft ) に飛行場標高を加えた値 ただし滑走路末端標高が飛行場標高より 2m ( 7ft ) を超えて下回る場合にあっては滑走路末端標高を加えた値
LNAV 進入に係る最低気象条件 既存航法の非精密進入に係る最低気象条件の基準と同じMDA/H
RVR、ただし RVR が利用できない場合及び RVR が最大適用値を超える場合は CMV により示される最低気象条件
Baro�VNAV 進入に係る最低気象条件DA/H
最低気象条件
DA は、 当該進入方式について算出された各航空機区分別の障害物間隔高度(OCA)、または、対応する LNAV 進入に係る MDA のいずれか高い高度。DH は滑走路末端標高を基準とする
DH を MDH と読み替えて、LNAV 進入と同じ基準により設定されるDA(290) = DH(276) + THR elev(14)MDA(290) = MDH(282) + AD elev(8)
RNP�AR 進入に係る最低気象条件DA/H最低気象条件
Baro-VNAV に係る基準に基づき設定される
RNP 値に応じた最低気象条件が公示されるいかなる場合も RNP0.3 に係る最低気象条件は公示される