1961 - Thermal Relationships in an Induction Motor Under Normal and Abnormal Operation
11
Should the respective impedances be other than equal throughout the frequency range, the loss may be either greater or less than 3 db. It must also be recognized that the impedances are not necessarily the nominal impedances of the lines but may be mate- rially influenced by the actual impedance of the terminating equipment at each ter- minal. The statement is also made that the 3-db loss amounts to 7.5% of the 40-db range of most blocking-type equipments. This may be confusing to both relay engineers and communication engineers as the inference is that 7.5% of the power on the line is dissipated in the tap. Such a conclusion is in error. The term "decibels" represents a func- tion of the logarithm of a ratio of two amounts of power, voltages, currents, etc., and the relationship of one db value to another as a percentage is therefore both incorrect and misleading. A power loss of 3 db represents a 50% loss of power as may be seen from the relationship 10 log10 1/2. It is earnestly recommended that, when relay or power personnel have occasion to lease channels from telephone companies for use with critical terminals such as pro- tective relay equipment, the problem be discussed fully with the proper telephone company people. Numerous instances of improper functioning of protective relay circuits have resulted from misunderstand- ings or lack of understanding between power and communication representatives. The impedance of terminal equipment on a leased line may be equally important at all fre- quencies over the voice frequency spectrum and is frequently quoted by the manufacturer at only the signal frequency. On many of the longer leased lines, hybrid transformers and repeaters are used by the telephone company for transmission reasons, and im- pedance considerations are of vital impor- tance for stability of the circuit. On protective circuits associated with multiterminal power lines, it is recom- mended that serious consideration be given to the use of separate protective circuits between each pair of terminals rather than a single multipoint protective circuit. Many of the problems inherent with multi- point channels, such as interaction between the several transmitters and receivers, bridging losses resulting from lateral taps, initial line-up of terminal equipment, potential disabling of the entire protective circuit because of trouble on one branch, etc., are minimized or eliminated by in- dividual point-to-point circuits. The addi- tional cost of this arrangement may be more than justified by the improved operation and service reliability of circuits of such critical importance. Joint consideration of the planned usage of proposed channels from the standpoint of the fundamentals of signal transmission will prevent or minimize what may other- wise be serious problems. A. J. McConnell: Undoubtedly, as Mr. Linders suggests, statistics giving the num- ber of the various kinds of protective systems in service and the relative performance of the various approaches would be valuable, but the questionnaire involved would have delayed the paper by perhaps a year or two. Possibly the Chairman of the Sub- committee will wish to consider the sug- gestion for a future project. Mr. Linders is correct in suggesting that many of the problems presented in the paper would disappear if system measure- ments could be made economically at loca- tions where current and potential trans- formers are not norinally available. But it would appear that an economical solution is not in the immediate future. Since the Working Group had no members well versed in the communication area, Mr. Leech was asked to prepare a discussion of the section "Channel Considerations." The Working Group believes that his con- tribution should be considered as part of the paper, rather than as simply a discus- sion. Of particular importance is his sug- gestion that there should be full discussion between power company and telephone com- pany personnel before a channel is leased for protective relaying. Thermal Relationships in an Induction Motor Under Normal and Abnormal Operation W. T. MARTINY ASSOCIATE MEMBER AIEE R. M. McCOY ASSOCIATE MEMBER AIEE Synopsis: Improvements in motor pro- tection and design require knowledge of the thermal effects produced in a motor when it is operating under normal and abnormal conditions. This paper describes a series of tests that were made on a 350-hp (horse- power) 900-rpm induction motor. The tests included single- and 3-phase stall and running tests, and acceleration tests at different voltage levels and subsynchronous speeds. A comprehensive picture is ob- tained of steady-state and transient tem- peratures in the stator and the rotor. An analysis of the thermal effects in terms of possible damage to the motor is presented. HE MOTOR PROTECTION en- gineer faced with the problem of protecting a given motor against damage arising from operations under abnormal conditions encounters, usually, a paucity of published information on the thermal conditions developed in the motor under H. B. MARGOLIS MEMBER AIEE these conditions. The basic reason for this lack of information is the difficulty of expressing a general thermal relation- ship in motors in terms of a simple relay. The complexity of the thermal relation- ships arises from the physical and elec- trical complexity of the motor construc- tion, the diverse applications that are encountered, the variety of possible abnormal operating conditions, and the many modes of failure that may occur. The sensitive physical components of the motor, aside from bearings, are the stator winding, conductor, turn, and ground insulation, rotor bars, and end rings. The sensitive electrical quantities are voltage, waveshape, and phase balance. Motor applications, even of the general-purpose type, cover a wide range of torques, inertias, starting requirements, inter- mittent loading, and ambient tempera- tures. The motor may be subjected to high voltage, low voltage, overload, single phasing, and stalling, to mention only the more common operating hazards. In addition to insulation failures, which are most common, breaking of rotor bars and of end rings may result. Despite these complexities, the pro- tection engineer does manage to protect motors adequately. It is a fair assump- tion that if we knew more about the thermal relationship within the motor under some of the abnormal conditions, a better job of protection could be done. The formulation of limiting tempera- tures for specified time periods for tem- perature-sensitive motor elements is an- other area which requires additional light if motor performance and protection are to be improved. At the suggestion of the AIEE Induction Machinery Subcom- Paper 60-225, recommended by the ATEE Rotating Machinery Committee and approved by the AIEE Technical Operations Department for presentation at the AIEE Winter General Meeting, New York, N. Y., January 31-February 5, 1960. Manuscript submitted November 30, 1959; made available for printing July 5, 1960. W. J. MARTINY and R. M. McCoy are with the General Electric Company, Schenectady, N. Y., and H. B. MARGOLIS is with the American Electric Power Service Corporation, New York, N. Y. The authors wish to acknowledge the valuable assistance rendered by L. L. Maturo in arranging and supervising the test program, and by Miss W. Donnelly in compiling and plotting the test results. Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor 66 APRIL l196 1
description
Motor Thermal Performance
Transcript of 1961 - Thermal Relationships in an Induction Motor Under Normal and Abnormal Operation

Should the respective impedances be otherthan equal throughout the frequency range,the loss may be either greater or less than3 db. It must also be recognized that theimpedances are not necessarily the nominalimpedances of the lines but may be mate-rially influenced by the actual impedanceof the terminating equipment at each ter-minal.The statement is also made that the 3-db
loss amounts to 7.5% of the 40-db range ofmost blocking-type equipments. This maybe confusing to both relay engineers andcommunication engineers as the inferenceis that 7.5% of the power on the line isdissipated in the tap. Such a conclusion isin error.The term "decibels" represents a func-
tion of the logarithm of a ratio of twoamounts of power, voltages, currents, etc.,and the relationship of one db value toanother as a percentage is therefore bothincorrect and misleading. A power loss of3 db represents a 50% loss of power as maybe seen from the relationship 10 log10 1/2.
It is earnestly recommended that, whenrelay or power personnel have occasion tolease channels from telephone companiesfor use with critical terminals such as pro-tective relay equipment, the problem bediscussed fully with the proper telephonecompany people. Numerous instances ofimproper functioning of protective relaycircuits have resulted from misunderstand-
ings or lack of understanding between powerand communication representatives. Theimpedance of terminal equipment on a leasedline may be equally important at all fre-quencies over the voice frequency spectrumand is frequently quoted by the manufacturerat only the signal frequency. On many ofthe longer leased lines, hybrid transformersand repeaters are used by the telephonecompany for transmission reasons, and im-pedance considerations are of vital impor-tance for stability of the circuit.On protective circuits associated with
multiterminal power lines, it is recom-mended that serious consideration be givento the use of separate protective circuitsbetween each pair of terminals rather thana single multipoint protective circuit.Many of the problems inherent with multi-point channels, such as interaction betweenthe several transmitters and receivers,bridging losses resulting from lateral taps,initial line-up of terminal equipment,potential disabling of the entire protectivecircuit because of trouble on one branch,etc., are minimized or eliminated by in-dividual point-to-point circuits. The addi-tional cost of this arrangement may be morethan justified by the improved operationand service reliability of circuits of suchcritical importance.
Joint consideration of the planned usageof proposed channels from the standpointof the fundamentals of signal transmission
will prevent or minimize what may other-wise be serious problems.
A. J. McConnell: Undoubtedly, as Mr.Linders suggests, statistics giving the num-ber of the various kinds of protective systemsin service and the relative performance ofthe various approaches would be valuable,but the questionnaire involved would havedelayed the paper by perhaps a year ortwo. Possibly the Chairman of the Sub-committee will wish to consider the sug-gestion for a future project.Mr. Linders is correct in suggesting that
many of the problems presented in thepaper would disappear if system measure-ments could be made economically at loca-tions where current and potential trans-formers are not norinally available. But itwould appear that an economical solution isnot in the immediate future.
Since the Working Group had no memberswell versed in the communication area, Mr.Leech was asked to prepare a discussion ofthe section "Channel Considerations."The Working Group believes that his con-tribution should be considered as part ofthe paper, rather than as simply a discus-sion. Of particular importance is his sug-gestion that there should be full discussionbetween power company and telephone com-pany personnel before a channel is leased forprotective relaying.
Thermal Relationships in an InductionMotor Under Normal and
Abnormal Operation
W. T. MARTINYASSOCIATE MEMBER AIEE
R. M. McCOYASSOCIATE MEMBER AIEE
Synopsis: Improvements in motor pro-tection and design require knowledge of thethermal effects produced in a motor whenit is operating under normal and abnormalconditions. This paper describes a seriesof tests that were made on a 350-hp (horse-power) 900-rpm induction motor. Thetests included single- and 3-phase stall andrunning tests, and acceleration tests atdifferent voltage levels and subsynchronousspeeds. A comprehensive picture is ob-tained of steady-state and transient tem-peratures in the stator and the rotor. Ananalysis of the thermal effects in terms ofpossible damage to the motor is presented.
HE MOTOR PROTECTION en-gineer faced with the problem of
protecting a given motor against damagearising from operations under abnormalconditions encounters, usually, a paucityof published information on the thermalconditions developed in the motor under
H. B. MARGOLISMEMBER AIEE
these conditions. The basic reason forthis lack of information is the difficultyof expressing a general thermal relation-ship in motors in terms of a simplerelay.The complexity of the thermal relation-
ships arises from the physical and elec-trical complexity of the motor construc-tion, the diverse applications that areencountered, the variety of possibleabnormal operating conditions, and themany modes of failure that may occur.The sensitive physical components of themotor, aside from bearings, are the statorwinding, conductor, turn, and groundinsulation, rotor bars, and end rings. Thesensitive electrical quantities are voltage,waveshape, and phase balance. Motorapplications, even of the general-purposetype, cover a wide range of torques,inertias, starting requirements, inter-
mittent loading, and ambient tempera-tures. The motor may be subjected tohigh voltage, low voltage, overload, singlephasing, and stalling, to mention only themore common operating hazards. Inaddition to insulation failures, which aremost common, breaking of rotor bars andof end rings may result.
Despite these complexities, the pro-tection engineer does manage to protectmotors adequately. It is a fair assump-tion that if we knew more about thethermal relationship within the motorunder some of the abnormal conditions,a better job of protection could be done.The formulation of limiting tempera-
tures for specified time periods for tem-perature-sensitive motor elements is an-other area which requires additional lightif motor performance and protection areto be improved. At the suggestion of theAIEE Induction Machinery Subcom-
Paper 60-225, recommended by the ATEE RotatingMachinery Committee and approved by the AIEETechnical Operations Department for presentationat the AIEE Winter General Meeting, New York,N. Y., January 31-February 5, 1960. Manuscriptsubmitted November 30, 1959; made availablefor printing July 5, 1960.
W. J. MARTINY and R. M. McCoy are with theGeneral Electric Company, Schenectady, N. Y.,and H. B. MARGOLIS is with the American ElectricPower Service Corporation, New York, N. Y.
The authors wish to acknowledge the valuableassistance rendered by L. L. Maturo in arrangingand supervising the test program, and by MissW. Donnelly in compiling and plotting the testresults.
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor66 APRIL l196 1

Table 1. Summary oF Replies to Questionnaife on Limiting Temperatures for Motor Opera-tion Under Emergency Conditions
Stator Rotor Bar Rotor End RingReplyNo. Stall Acc* Stall Acc Stall Acc Remarks
I........ 130 130. 190 .190. 85 ... 85. End ring connections to115 C, short time.
2.... 155 125. 300. 200..... 200. 150. Arbitrary values.3. 10 ...10 640 640. 140. 40. For two successive starts.4. 105 105 ... 340..240 120. 805.. 150....... 200. 200 ... 200.. Based on tests.6. 150 125 . 300 ... 200. sot .... 80t7. 175 .150. 400. 200. 200 .1008. 180 .150 .. 350..200 .3 2009. 150... 125 30. 250. 300. 20010. .. 380. 280.. 80... 40t
Recapitulation, Range105 . 105. 190. 190. 85. 85190 ...... 190. 640. 640. 350 200
Average156 ... 140. 364. 285. 191 ... 140
* Acceleration.t Applies to brazed-type cage (not included in recapitulation).t Temperature rise; total temperature not important.
mittee, ten leading motor manufacturerswere polled on limiting temperatureswhich each would regard as acceptableduring stall and acceleration tests ona 200-hp 1,800-rpm 4,000-volt class Amotor, driving a fan. The replies aretabulated in Table I. The wide rangeof replies is indicative that additional dataon the subject are desirable.
The Tests
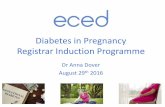
To obtain the desired information onmotor thermal characteristics and limit-ing temperatures, tests were taken on asquirrel-cage motor rated 8-pole, 350-hp,900-rpm, 3-phase, 60-cycle, 440-volt.This motor has a dripproof enclosure andwas built with sleeve bearings. Thestator has formed coils of class A insula-tion. The rotor winding is cast alumi-num; see Fig. 1 which shows the motorin the test setup.Thermocouples were installed in the
stator winding and the rotor winding.Refer to Figs. 2(A) and (B) for the loca-tion of the stator thermocouples and
the rotor thermocouples respectively.Table II gives a chart of the motor pa-rameters and dimensions.
Stator and rotor temperatures weretaken with the use of photoelectricrecorders for the transient tests, and adirect-reading device as well for the loadruns. Rotor thermocouples were broughtout through a shaft hole and connectedto a special slip ring assembly; see Figs.3 and 4.
Slip ring accuracy was checked at staticconditions and thermocouple readingswere found to be identical for the rotorthermocouples when read through theslip rings and with the slip rings bypassed.Further runs were made with the rotorrotating and at standstill without affect-ing the continuity of the readings.These tests were to establish confidencein the accuracy of the readings takenthrough the slip rings for this setup.Prior testing by the General ElectricMaterials and Processes Laboratory hadestablished that the slip ring was anaccurate device in itself.A test alternator rated 2,812 kilovolt-
Table II. Physical Constants and TestedValues
Eight-Pole 350-Hp 900-RPM 3-Phase 440-Volt 60-Cycle Induction Motor
Items Dimensions, Parameters
Physical ConstantsDiameters
Stator outer......... 28Stator inner......... 21.5Rotor outer......... 21.43> inchesRotor inner ......... 15.75
Stack length, axial ..... 15 7Air ducts ......... 61/I inches equally spacedStator slots ......... 96Rotor slots ......... 116Stator winding........ 4-circuit, 75% pitchCoil ......... 7 turns of 0.09OX250 cop-
per wireInsulation ......... Polyex
Tested ValuesMagnetizing current... 99.6 amps, lineLeakage reactance..... o.406 ohm, per-phase deltaStator resistance...... 0.0265 per phase delta at
25 CCore loss ......... 4.854 kwWindage and friction.. 1 120 kwFull-load current 407 amps, lineStarting current ....... 2,400 amps, lineStarting torque ........ 2,880 lb-ftFull-load speed........ 883 rpm
amperes was used which had a synchro-nous drive motor and was equipped witha voltage regulator. (Some of the hunt-ing indicated by Fig. 32 is no doubt dueto the regulator device.)The dynamometer used for the load
tests is of the induction type and isequipped with special controls. Onefeature of these controls is a speed setdevice which regulates the excitation tohold a fixed speed. This setting was usedfor test IIA7. In addition, the excita-tion may also be set to give an approxi-mation to a fan-type torque load over thespeed range. This setting was used forsome of the acceleration tests.The tests are listed and tabulated in
the following:
I. STALL TESTS
A. THREE-PHASE
TestDesig- Motor Terminal Reference,nation Voltage Fig. No.
Ia .rated .....5lb .rated .....
62a. above rated .....
72b. above rated... 8
3 .below rated ...... 9
Fig. 1. Motor con-nected to dyna-mometer, including
instrumentation
B. SINGLE-PHASE
TestDesig- Motor TerminI Reference,nation Voltage Fig. No.
1 .rated ..... 102. abov erated......
3a .below rated ..... 123b . below rated ..... 13
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor 67APRIL 1961

RD[,RD2 RBI, R82
REI,RE2
RBI
POLE PITCH REI
RB12
RE2
.060
U1.310SM2
ST2,SEI,SE2 IB
(B)
Fig. 2. Locations oF winding thermocouples. A-Stator. B-Rotor
II. RUNNING TESTSA ACCELERATION
Ref-Test erence,
Desig- Load or Fig. Inertianation No Load Voltage No. or Speed
Ia.. no load.... rated......... 14lb.. no load..... rated......... 152.. no load..... above rated...81B3a. no load..... below rated...17 147%3b... no load... .below rated ... 18 NEMAt4... no load..... below rated ... 19 inertiawawith load ... rated......... 20
5b... with load ... rated ...... ...215c ... with load ... rated 22fi .. with load ... rated* 237 .. no load..... rated......... 24 .50% speed
a Double acceleration.t National Electrical Manufacturers Association.
B. LOAD
TestDesig- Per Cent Reference,nation Load Fig. No.
1. Three-Phase Rated Voltagea.. 10. 25b.. 130 .... 26c............ 150 ......... 27d . 175 ........... 28
2. Single-Phase Rated Voltage100 .. .... 29
b...... . 67.5 30
TEST IA: 3-PHASE STALL TESTS
Three-phase stall tests were taken bylocking the rotor in position and applyinga specific balanced 3-phase voltage.Under these conditions the voltage atthe motor terminals dropped due to reg-ulation in the lines between the alternatorand the motor. The line voltage waspreadjusted to level at rated voltage atthe motor terminals, an overvoltage andan undervoltage. This simulated aninfinite bus condition for rated voltageand a weaker bus source condition for theundervoltage condition where rated volt-age was initially applied. Voltage andcurrent were recorded on Brush recorders.Fig. 32(A) illustrates the voltage and cur-rent variations at the motor terminals forTest lAla. Because of the short tran-sient and constant readings for the great-est length of the test period, only final
steady-state values are tabulated for theremainder of the test runs.
All 3-phase stall tests were taken withpower applied for a fixed time period forease in comparison and because of thedifficulty in test procedures which wouldresult if a specific temperature limit werechosen instead.
Eight recorders were utilized duringthe static tests to minimize the data-taking task to a reasonable job. For thisreason two of the 3-phase stall tests aswell as some of the other tests were re-peated to obtain data on some of theother thermocouples installed; to checkthe repeatability of the data; and to givefurther insight into the behavior of theoriginal end ring thermocouple. A re-view of the test curves will show thatthe degree of repeatability is good ona teinperature-rise basis. For instance,
III. PARAMETER TESTS
TestDesig-nation
I stator resistance2. impedance results Table 113. excitation results4. speed torque and current curves. . Fig. 31
Fig. 3. Slip ringa*embly
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor
(A)
Reference
Descriptions of the tests follow.
68 APRIL 1961

Fig. 4. Squirrel-cage rotor with thermo-couple leads through hollow shaft
for tests IA2a and IA2h, thermocouple(TC) SB 3 shows about a 60-degree risefor both tests; and on tests IAla andIAII), TC RBI shows about 135 C (de-grees centigrade) rise for both tests, andTC REI about a O1 C and a 107 C rise.
Exact checking is rather difficult,especiallv wlhere the machine does notstart testing with all parts at a constantambient condition. It should also berecognized that this situation of constanttemperature of all parts is not met by amachine in a normal service situation.
It should be further pointed out thatin the recording graduations a space ofabout l/8 inch might represent from about7 to 17 C, depending upon the calibratedscale. It is nevertheless felt that thesedata are highly reliable within an ac-
200
I-~~~~~~~_D
20X!
680I-J&
TIME IN SECONDS
curacy range of at least 15 C and com-pletely satisfactory for evaluation interms of injurious heating and motorprotection.
TEST IB: SINGLE-PHASE STALL TESTS
These tests were taken in the samemanner as the 3-phase stall tests. Forthese the rotor was positioned so thatthe rotor slot TC's in the number 2 posi-tion were placed in their maximum cur-rent positions for the tests.
Refer to test IB3b. It may be notedthat TCs RDI and RB1 show a muchlower rise then TCs RD2 and RB2.Heat flow is inward towards the centerof the stack for RDI and RB1 sincethey peak at a later period of time. It isfelt that these readings provide goodevidence of proper rotor positioning forthese tests.
It is also interesting to note that REIlocated 90 electrical degrees away fromthe maximum current slot shows a tem-perature rise in the same order of mag-nitude as RE2. TC REI is located inthe maximum end ring current and theloss at this point no doubt contributedheavily to the temperature rise of RD1and RB1.
TEST IIA: ACCELERATION TESTs
Three-phase acceleration tests weretaken accelerating the dynamometer,jackshafts, and couplings, and a largemotor was utilized for inertia. Cal-culated inertia for the combination is11,100 lb-ft (pound-feet).' Based on thespeed-torque curve of Fig. 31 and thevoltage variation curve of Fig. 32(B),the estimated accelerating time for testIlAla is 14 sec (seconds) as comparedwith 13 sec by test.The machine was accelerated to full
Fig. 5 (left). 240Test lAl: 3-phase stall. Pre-set voltage 525 200volts final volt-age 440 volts/final current o160 I
2,320 amp (am- Ieres), time 25sc V
Fig. 7 (right). 8 gTed lA2a: 3- 1
= phase stall Pfe-set voltage 620 4
-volts; final volt-age 520 voltz 2
tnal current
10 z! 2,750 amp, time25 sec
100
2000 20 40 60 8o 100
TIME IN SECONDS
Fig 6 Test IAI b: 3-phase stll. Presetvoltage 525 volta, final voltage 432 volts,
final current 2,350 amp, time 25 sec
speed with a no-load torque applied onthe dynamometer, and with a load torque.The load torque curve is shown in Fig.31; Fig. 32(B) shows a typical variationin voltage and current during accelerationfor test IIAla. Final voltage in thiscase is the terminal voltage of the machinewith the motor at full speed for the appliedload of the particular test and acceleratingvoltage is the lower voltage on the motorterminals during the longest time of theaccelerating period die to the line voltagedrop. In the previous tabulation oftests the voltage referred to as rated,overrated, and underrated is the finalvoltage for both the acceleration and stalltests.
Martiny, McCoy, Margolis-Thermal Relationships in Induction MotorAPRIL 1961 69

200000-
160 R
1h20
a.80
40
0 Z0 40 60TIM E IN SECONDS
Fig. 8. Test lA2b: 3-phase stvoltage 620 volts, Anal voltage
Rnal current 2,770 ampj time
Test IIA6 is a double accelerThe drive was first acceleratecdynamometer torque set as iIThe motor power was cut 1mometer excitation was not.drive reached standstill, itaccelerated by applying powmotor.
Test IIA7 gives an indicatioitemperature rise when a machinstalled while running. The lautilized for inertia was discon:this test and the dynamomeset control was used to deceleraspeed as quickly as possible.was taken primarily to illustratrises which may occur if the miis reduced below the maximuspeed point during its operatio:
TEST IIB: LOAD TESTS
Heat runs were taken forconditions at rated voltage
160
140
120 -
w 9
a. 80
a-
TIME IN SE(
RE2 phase conditions and under two loadconditions for the single-phase tests. In
_____ order to shorten the time required forrB2 testing, the load tests were not taken
SM3 with the machine initially at ambientl_ = conditions. The 175% load 3-phase.. ST3 heat runs come closest to this condition.33 - - In general, runs were no longer than
absolutely necessary to obtain ultimatetemperatures. In some cases the tem-peratures are just shy of reaching thislevel condition.As loading increases, the rise in the
80 ' rotor appears to be more rapid than in
tall. preset the stator, probably because the rotor lossesal Poreset are dependent nearly completely on load,525 solts whereas in the stator (especially at full
load) the stator core loss provides asignificant contribution.
ation test. For the machine tested, thermalI with the equilibrium is reached in about 40 minutesn Fig. 31. and the "machine" thermal time constantbut dyna- is in the order of 7 to 10 minutes for theAfter the running 3-phase condition.was re- (A review of test IIBId shows that
er to the each thermocouple location has its ownassociated time constant and that these
n of motor range from about 3 to 15 minutes.)ie is nearly For the single-phase heat runs allLrge motor thermocouples were placed in the hottestnected for phase with the exception of the end-turnter speed thermocouples. The hot resistance tem-
.te to 50% perature was taken across the two linesThis test where power was applied, but it included
e the rapid all of the phases for this delta connec-otor speed tion.im torque
TEST III: PARAMETER TESTSn.The parameter tests were taken in
accordance with the AIEE Standard.2four load The calculated parameters, along with theunder 3- physical constants data provided in
Fig. 9 (left).Test 1A3: 3-phase stall. Pre-set voltage 440volts] Anal volt-
REI age 368 volts,fnal current, 2001,900 amp, time
25 sec=160
RDIw
M1204
__________ _____ Fig. 10 (right).Test IBI: single- 80
65B2 fSE3 ~~phase stall. Pre-/_se votg 560_
SI volts, final volt- 40.................'IC - age 438 volts;
SE4 final current80O- M 120 1,940 amp; time o -80NDS 300 50 0
CONDS 35 sec
Table I provide information for analysisof the temperature data.
Test Results
STALL TESTS
Under the condition of full-voltagelocked rotor the rate of rise (ROR) is sohigh that destructive temperatures areattained in a short period. In analyzingthis type of operation it is necessary toconsider only the transient portion of themotor temperature characteristics. Inthe short allowed time the total amountof heat dissipated is very small comparedwith input and it can be neglected. Withall of the heat stored in the machine thebasic practical problem is to determinehow much of the material is activeduring the stalled period.
This is a rather complex problem in-volving a property of the materials andsurface contacts called the thermal trans-missivity, which is the ratio of thermalconductivity to specific heat. As a firstapproximation to the transient rise itmay be assumed that all of the heatremains in the conductor during the stallperiod, which would not be greatly inerror because the stator conductorsare thermally isolated from the iron bythe electrical insulation. In this simplecase the ROR is linear and dependentupon the current density and the proper-ties of the material. For bare copper at75 C the ROR is given by
ROR=.014 current density 2
ROR=0.014( 100
where ROR is in C per second andcurrent density is in amperes per squareinch. As a second refinement the heatstorage capacity of the insulation canbe added to that of the conductor. Thisassumes that the total mass of the in-sulation follows the conductor tem-perature exactly. Experience shows that
TIME IN SECONDS
Martiny, McCoy, Margolis Thermal Relationships in Induction Motor70 APRIL 196 1

TIME IN SECONDS
this is not the case; however, someheat does pass through the insulation intothe iron. The complete solution to theproblem is far from simple. Several con-trolling factors vary widely, e.g., thecontact resistance between the insulation
Fig. 11 (left).Test IB2: single-phase stall. Pre-set voltage 660volts, fnal volt-age 519 volts,final current2,300 amp; time
35 sec
Fig. 12 (right).Test 1B3a: single-phase stall. Pre-set voltage 468volts, Anal volt-age 368 volts,Ainal current1,600 amp; time
35 sec
Fig. 13 (left).Test IB3b: single.phase sall. Pre-set voltage 534volts} Anal volt-age 414 volts,Anal current1,858 amp; time
25 sec
Fig. 14 (right).Test IIAIa: no-load accelera-tion. Final volt-age 448 volts;accelerating time
13 sec
Fig. 15 (left).T"t IlAIb: no-load accelera-tion. Final volt-age 444 volts;accelerating time
13 sec
Fig. 16 (right).Test IIA2: no-load accelera-tion. Final volt-age 492 volts;accelerating time
11.2 sec
and the iron. In addition, the end turnmust conduct heat axially into the slotbefore this heat can be transmitted to theiron.Under the full-voltage 3-phase stall
(test IAla) the test motor had a current
TIME IN SECONDS
TIME IN SECONDS
100
8C
;£I
FzL40 S8
0A - I
0oo40 60TIME IN SECONDS
density of 14,860 amp/square inch.Using the expression above, the ROR iscalculated to be 3.1 C/sec. The thermalmass of the wire enamel and tape on thecoil is about 11% of that of the conductoritself. If this were added directly to the
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor
o 20 80
APRIL 1961 71

U
zWI
I-4
1--
I.)
I-4:Wa.
TIME IN SECONDS
TIME IN SECONDS
conductor the rate of rise would bereducedto 2.8 C/see.
In the 25-second stalled period the riseis calculated to be 70 C. The actualmeasured temperature rise is appreciably
Fig. I 7(left). TestIIA3a: no-loada c c e I e r a tion.Final voltage 366volts; accelerat-ing time 21.5 sec
Fig. 18 (right).Test IlA3b: no-loadacceleration.Final voltage 368volts, accelerat-ing time 21.5 sec
Fig.19(left). TestIIA4: no-loada c c e I e r a tion.Final voltage 290volts; accelerat-ing time 42 sec
Fig. 20 (right).Test IlA5a: loadacceleration. Fi-nal voltage 438volts, accelerat-ing time 15.3 sec
Fig. 21 (left). TestIlA5b: load accel-eration. Final volt-age 438 volts, ac-celerating time 1 5.3
sec
Fig. 22 (right). TestIlA5c: load accel-eration. Final volt-age 440 volts, ac-celerating time 15
sec
below this figure. In the bottom of theslot the rise is about 40 C and on theend turn the rise is about 35 C or onlyhalf of the calculated value. Sincethe thermocouples were installed on the
C.
LLJ
TIME IN SECONDS
/ ,/~~RE2 ~ ,-~RB2
RE2~~~~~~~~O
40 60T IME IN SECONDS
TIME IN SECONDS
surface of the coil insulation they did notfollow the actual conductor temperature.This effect is also evident from the shapeof the time temperature curve. Theinitial period shows an inflection from
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor
0 20 80 l00
72 APRIL 1,96;1

8 / R RE2 t -ST3z
POOWER OFF MOTOR + PXER0
w 0 40 8 12
TIME IN SECONDS
an almost zero ROR to a maximum valueof 1.8 C/sec for TC SB3. This thermo-couple, as with the other winding thermo-couples, continues to rise after power-off,which means that they are not contactingthe hottest part of the machine.
Although the rotor was much hotterthan the stator, the speed with which thestato)r thermocouples peak and declineis more indicative of a higher statorconductor temperature. The time re-quired for the rotor heat to cross the airgap and heat the stator iron is severalminutes, and this would result in a secondinflection off the scale of the chart. Al-though no thermocouple was applied tothe iron, this would have been slowerthan the ones for the insulation. Thefarther from the conductor or the hot part,the slower the response.
In addition to the time lag, there is arather large variation in temperaturerise as measured hy the several winding
~~/ SEI\5M
40
,,60. W O T- P
'U ~~TIEIN EOD
anams er O oamaiu au
TIME IN MINUTES
Fig. 23 (left). 160Test IIA6:double-load ac-celeration. Final 140voltage 440volts, accelerat-ing time 15 sec 120
,SM3 8
40
20 - Hthermoeouples. It is quite un~lkel tha
'HE
MOTOR ~Fig. 24 (right). 5
Test 11A7: 50%7 DECELspeed test. FinalI T0 5voltage 440 volts
thermocouples. It is quite unlikely thatsuch temperature differences actuallyexist along the length of the conductoror between coils. A more reasonableexplanation is that the thermocouples areaveraging the conductor temperature withsome other nearby surface. More precisedata would have been obtained by im-bedding the thermocouple in the condue-tor. This adds considerably to the diffi-culty of the test, since it puts the thermo-couple at line potential.
It is possible that the actual conductortemperature did reach the calculated 70 Crise. Because of the slow response of thethermocouple, its maximum indicationrepresents an average of 25 see with poweron, and 15 sec of power off (the peakoccurred 40 see after start). The initialrate of decline in conductor temperaturecannot be determined from the test data.At the end of the 40-sec period, it appearsthat the conductor is in thermal equi-
Fig. 25 (left). Test I1B1a: 3-phaseheat run, 100% load, 440 volts;
2vRE2 407 ampj 280-kw input ambient- R02 25 C, hot res (resistance) tempera-
ture 60 C
Fig. 26 (right). Test IIBI b: 3-phase heat run, 1 30% load, 440voltsj 529 amp1 370-kw input
-I ambient 32 C, hot res tempera-ture 90.5 C
TIME IN SECONDS
librium with the insulation and the ironimmediately adjacent to it. If it were not,the temperature would begin a decline tothe iron temperature. All of the powerput into the stator conductor must bestored as heat in the copper, the insula-tion, or the surrounding lamination iron.It would seem more reasonable to expectthat 25% of the heat had been conductedaway than the 50% as shown by tests.This would result in a maximum coppertemperature of about 90 C.The same problems exist in determining
the temperature rise of the rotor partswith a few additional complications. Inthe rotor (particularly in the case of castrotors) the heat transfer from the conduc-tor to the iron is much quicker. Henceit is completely unrealistic to ignore theeffect of the rotor iron on the bar ROR.
00 -
RE2
T~SM3---'cr 60
cr ~~~~~SE2
w 40
20 30TIME IN MINUTES
Martiny, AMcCoy, Margolis-Thermal Relationships in Induction MotorAPRIL 1961 73

For pure aluminum at 75 C the RORequation becomes
ROR = 0.033/current density 2ROR=0.033~ 1,000
The current density of the rotor bar forthe full-voltage 3-phase stall test was15,350 amp/square inch. With the useof the simple equation about the RORbecomes 7.8 C/sec, without taking intoconsideration the skin effect, which in-creases the effective resistance of the rotorbar. This factor is about 2.3 for themotor in question, which increases theROR to 17.9 C/sec. Hence, for the 25-sec stall period, the total bar rise wouldbe calculated to be 448 C. When a tem-perature range as wide as this is consid-ered, many other effects must be included,e.g., the resistivity of the conductorchanges by nearly two to one over theassumed value. Offsetting this is theeffect of the change in resistance upon the
200
R02 >
160
RE2 /\ .
120 - ~~~SM3
120
4
~80SEI
40S63
00 2 4 6
TIME IN MINUTES
Fig. 29. Test 1I1B2a: single-phase heat run,67.51% load; 440 voltsj 534 amp, 203-kcwinput ambient 30 C, hot res temperature
122 C
Fig. 27 (left). Test IlBic: 3- 280 -phase heaf run} 150% load, 440voltsb 608 amp; 421 -kw inputambient 27 C, hot res tempera- 240
ture 11 5 C
200
160
a. 120
80 k
Fig. 28 (right). Test IIBI d: 3- 40phase heat run; 175% loadj 440volts, 770 amp, 51 6-kw inputambient 27 C, hot res tempera- o0
ture 148 C 0
skin effect of the bar. Far more impor-tant is the effectof the rotor iron in absorb-ing a substantial portion of the heat lossto prevent attaining these abnormal tem-peratures. The actual bar rise was only160 C from the test (lAla) which showsthat nearly two thirds of the bar loss wastransmitted to the iron during the 25-secstall geriod. This compares very closelywith the analysis in reference 3. It isinteresting to note that the thermocouplesmeasuring the bar temperature do nothave the initial lag and terminal overshoottypical of the stator thermocouples.This is strong evidence that the actualconductor tenmperature is being measured.The rotor thermocouples were actuallyimbedded in the conductor material andhence would be more likely to give thisfast response.The end ring temperature rise can be
calculated for the same test as were therotor bars. Here there is no skin effect.Since the contact with the iron is in gen-eral not as good as for the bars, less heatwill be conducted away. The currentdensity for test IAla was 8,500 amp/-square inch. The current in the end ringis not uniform in space; therefore an effec-tive value of current density must be used.At this level of density the temperaturerise is 2.4 C/sec, or 60 C total rise. Theactual rise was 133 C with a maximumROR of 6 C/sec. This is undoubtedly theresult of a great deal of heat flow fromthe bars to the end ring. In general, onthe rapid heating tests, the end ringtemperature followed the bar tempera-ture, peaking considerably later andusually after the power was taken off.A similar analysis for the other 3-phase
stall tests will show that the tempera-
ture rise is proportional to currentsquared.The same approach can be used for
analyzing the single-phase tests exceptthat the current on single phase is notequal in all conductors. In the stator ofthis machine the current in one phase willbe nearly twice that of the other phases.In the rotor certain bars will be idle whileothers will carry maximum current.This condition also exists at any instanton a 3-phase stall but the field rotatesand, as it does so, makes a differentconductor the highest in current density.This effect is apparent by comparingRD2 and RDI of test IB3b. Thesethermocouples are located in similarpositions on two bars one half-pole pitchdisplaced.
TIME IN MINUTES
Fig. 30. Test IlB2b: single-phase heat run;100% load; 440 volts1 900 amps 320-kwInput ambient 31 C, hot res temperature
101 C
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor74 APRIL 1961

2800
2400
2000
LO
w
w
1600 c
a
1200 0cr
800
400
400 600 800SPEED IN RPM
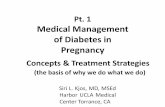
Fig. 31. Motor speed torque and currentcurves at 440 volts and load torque curve of
dynamometer
On several of the stall tests the rotorbar and end ring temperatures approached200 C. It is also quite likely that thestator temperature exceeded 105 C, sincetemperatures of 95 C were recordedand it is expected that considerable over-shoot was experienced. While thesetemperatures are in excess of the tem-perature rating of the motor, no visibledamage resulted. The maximum safetemperature for the stator under short-time stall conditions is estimated byvarious manufacturers to be 105 to 190 C;see Table I.
If the end ring of this motor were toattain a temperature of 200 C while therotor iron were still at room temperature+40 C, the differential expansion can becalculated to produce a shear stress inthe rotor bars of 15 kilogram-inches/sec.
2800
2400
2000
Cl)
a 1600s4
z
2 1200Uz2:a:
<)
(A
-J0
800
Fig. 32. Voltageand current varia-tions at motorteminals. A-For test IAIa.B-For test IIAI a
400
0
The above analysis was made assuminga thin ring with no movement of the bars.Since the total radial expansion is only0.040 inch, considerable error is possibleif bar movement is actually present.Because of the properties of soft-an-nealed aluminum, it can be expected toyield at this stress but not to rupture.
Despite the analysis, this temperaturefor the end ring is safe. During the tests,the end ring exceeded 200 C at least threetimes with no apparent damage.
It is interesting to note that actualfailures of rotors are rare. This is veryimportant because in large motor applica-tions the end ring expansion is probablythe most critical factor during stall oracceleration. In small motors the statorwinding temperature is most likely to bethe most critical factor. There is needfor more experimental work in the areaof rotor failure before it will be possibleto define a maximum safe temperature tobe used as a design criterion or industrystandard.
In view of the foregoing, each manu-facturer determines what limit of tem-perature he will permit. In general,these are based on experience with hisparticular design and some analysis.Table I is illustrative of values used bymotor manufacturers. In determiningsafe stall time for the motor tested themost vulnerable part is the rotor endring. From test IAla the ROR andallowed stall times, with limiting tempera-ture values from Table I, are shown inTable III. In selecting the extremevalues for allowable rise from Table I thereplies at 80 and 85 C maximum end ringtemperatures were not used since these
TIME IN SECONDS(A)
Table Ill. ROR and Stall Times
Maximum Maximum SafeObservable Rise, 40 C Stall Time,ROR, C/Sec Ambient Sec
Stator winding 1.81. 150.. 83 max1 65 36 min
Rotor bar. 8.3. 600.. 72 max1150 . 18 min
Rotor end ring....6.1. .. .. 26 max80 13 min
probably apply to brazed bar construc-tion.
ACCELERATION TESTS
The temperature rise of the rotor duringan acceleration is shown to be consider-ably less than for a stall of the same timeduration. The same inertia was startedwith no appreciable load at three linevoltages. The time required for thestart was 11.2 sec at 492 volts, 13 sec at448 volts and 21.5 sec at 366 volts. Thesetime values are within 1 sec of being in-versely proportional to voltage squared.The temperature rise of the rotor bar is53, 53, and 50 C respectively. Thisdemonstrates very effectively that therotor temperature is independent of linecurrent or voltage under these conditions.The rotor bar temperature from the 3-phase stall test for equivalent times atabout the same voltages were 520 volts,11 sec, 110 C rise; 440 volts, 13 sec, 100C rise; and 368 volts, 21.5 sec, 103 C rise.These temperatures are roughly twicethose for a single start. The reason forthis is that a substantial part of the energytransferred to the rotor is converted tomechanical energy when the rotor comes
TIME IN SECONDS
(B)
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor
700
600 AN.-.-7-
CURRENT500
VOLTAGE
400
300
200
100
0 I -1-- I0 4 a 12 16 2n 94- r_v C144
APRIL 1961 75

up to speed, whereas it must all becomeheat under stalled rotor conditions.
Test IIAG illustrates the effect of twosuccessive starts on the motor. Herethe temperature rise on each start isapproximately 60 C but the motor waspermitted to cool almost 3() C betweenstarts by coasting for 100 sec. Had thisbeen two successive stalls spaced 100 secapart, the end ring would attain a riseof 220 C instead of the roughlv 90 C risefor the two starts. The actual tempera-ture rises were low compared with thoseshown in Table I or the class A allow-ance.
FULL-LOAD TESTS
The ROR under running overload ismuch slower than under stall conditions.Often the ultimate temperature is reachedbefore serious damage occurs. Thismotor was capable of 130%0 of rated loadwithout exceeding the design limit forclass A insulation; see test IIBIb.When comparing tests IIBla (the 100%load) with IlBIb and IIBId it can beseen that the rise by resistance variesvery nearly as the current squared.The maximum rotor temperature risedoes not obey this rule nearly so well.On the 175% overload test IIBId thetemperature would be 3.55 times the 50 Crise on test IIBIb if ratioed directly asthe square of the current. Owing to theincrease in rotor resistance because ofhigh operating temperature, the rise isactually 4.7 times that at rated load.
Conclusions
Although the calculations are not pre-cise, it is possible to predict motortemperature rise under transient as wellas steady-state operating conditions.These calculations involve the additional
parameter time and are therefore moredifficult to verify from test. With moredetailed analysis as described in reference3, it should be possible to predict stalltemperature rise very accurately.The motor exceeded design temperature
several times during these tests and therewas no visible damage. It appears thatthe end ring temperature is the most likelyto cause damage on this motor, since thisis the onlv part that exceeded the maxi-mum values given in Table I. In generalthe rotor temperature rises were con-siderably higher than those for the stator.The data of this report should be a first
step in determining the best means ofapplying protection to medium-size in-duction motors. While this particularmotor is a very easy one to protect at itsnormal rating, much can be learned fromattempting to protect this motor at itslimit of operation. To illustrate thepoint, consider the 130% heat run.This motor has class A insulation, whichaccording to AIEE No. 1,4 iS good for105 C continuous. In a 32 C ambientthis motor had a temperature of 91 C at130%7 load. The 14 C difference betweenthe actual operating temperature anddesign limit for the insulation is certainlyample hot-spot allowance. If a relaywere to be applied at 530-amp trip con-tinuous, it would permit loading to thislevel. Now, referring to the safe stalltimes given above, it would seem that 26sec is permissible for full-voltage 3-phasestall or 2,320 amp. Therefore, the relayshould trip in 26 sec at 4.4 times ratedtrip current. To protect for overvoltagethe trip time at six times full load currentwould be 14 sec. This relay would alsopermit the starting of an 11,800 lb-ft2inertia which required only 13 sec at fullvoltage.
If, on the other hand, it is desired to
protect the motor at the rated full-loadcurrent of 407 amp, then the relay shouldoperate in 26 sec at 5.7 times full-loadcurrent. And for overvoltage at sixtimes current, it must operate at 23 sec.This slower relay will also permit startingthe 11,800 lb-ft2 inertia.
Since the maximum temperature at-tained on the stall test is about 200 C, thetrip time on stall can be adjusted forambient by the ratio of 200 ambient/170)X26. Thus, in a 50 C ambient, the timewill be 23 sec at 4.4 times full-load currentand in a -110 C ambient it will be 32sec.
While a relay so designed would protectthis motor for the normal conditions thatcause overtemperature there is no reasonto expect the same relay to protect an-other motor. To illustrate the point,refer to the data of the Heidbreder paper,'in which are published the characteristicsof several large machines. For these thesafe stall times vary considerably fromthose shown for the motor reported here.It is also important to point out thatsmall motors are probably stator-limited(except for National Electrical Manu-facturers Association design D motors)and therefore present different protectionand application problems.
References
1. INDUCION MOTOR TEMPERATURE CHARAC-TERISTICS, J. F. Heidbreder. AIEE Transactions,Pt. III (Power Apparatus and Systems), vol. 77,Oct. 1958, pp. 800-04.
2. TEST CODE FOR POLYPHASE INDUCTIONMOTORS AND GENERATORS. C500Z (AIEE Stand-ard no. 500), American Standards Association,Inc., New York, N. Y., Dec. 1954.
3. THE: TRANSIENT STALLED TEMPERATtURE RISEOF CAST-ALUMINUM SQUIRREL-CAGE ROTORS FORINDUCTION MOTORS, G. M. Rosenberry, Jr.AIEE Transactions, pt. III (Power Apparatus andSystems), vol. 74, Oct. 1955, pp. 819-24.4. GENERAL PRINCIPLES UPON WHICH TEMPERA-TURE LIMITS ARE BASED IN THE RATING OF ELEC-TRIC EQUIPMENT. AIEE No. 1, 1957.
DiscussionJ. J. Courtin (Westinghouse Electric Cor-poration, Buffalo, N. Y.): The cast alumi-num rotor construction of the test motoris of considerable interest because of itssize. In the analysis of its forces underheating it is believed that the authorsmay be considering it as though it were
of brazed construction. They indicate thatexceeding 200 C resulted in no apparentdamage and that it would be safe at thattemperature. It is believed that no damagewould result to the rotor itself by lettingit go to a much higher temnperature.
Pure aluminumn has high shrinkage and isnot used for castings except for such thingsas induction motor rotors where highconductivity is desired. Due to its rapidcooling characteristics, stresses are present
in this type of casting. It is thereforeconsidered that when heated to, say, 200 C,the action in the casting is merely to relievethe internal stresses, and that there are noforces tending to shear the bars as theauthors indicate.
As to what would be a safe limitingtemperature for this type of rotor, otherfactors are involved. When aluminum isheated, the elongation property increases;thus, at 370 C it is double its value at 25 C.The yield strength of aluminum decreaseswith heat and at 370 degrees is only 20%7oof its value at room temperature. Atabout 400 C it becomes plastic, and themelting point is 660 C.
In so far as the rotor at standstill isconcerned, its temperature could go wellup into the plastic region of 400 to 480 Cwithout damage on recooling. Its limitingtemperature would need to be determined
by the effect of the transmittal of its heatto the stator. In the tests reported thereis no indication that rotor heat at the levelrecorded contributed appreciably to statortemperature.The limiting temperature for rotation of
rotor would be that temperature at whichthe blower vanes would deform, dependingon their dimensions and peripheral velocityand considering the reduced strength atthe elevated temperature. Because ofthe nature of these factors, the writer isnot suggesting what the limiting teiiipera-ture for this aluminum rotor should bebut believes that 200 C is qtuite conservative.
A. Hauspurg and M. I. Olken (AniericanElectric Power Service Corporation, NewYork, N. Y.): Designing protection systemnsfor motors has always been a difficult
Martiny, McCoy, Margolis-Thermal Relationships in Induction Motor
-S ~~~~~~-0
APRIL 196176