16.362 Signal and System I The representation of discrete-time signals in terms of impulse Example.
22
16.362 Signal and System I representation of discrete-time signals in terms of impulse Example ] 0 [ ] [ ] 0 [ x n x k k n k x n x ] [ ] [ ] [ ] [ ] [ ] [ k x k n k x ] 1 [ ] 1 [ ] 1 [ x n x 0 ] [ ] [ ] [ ] [ k k k n k n k u n u
-
Upload
daniela-patrick -
Category
Documents
-
view
216 -
download
0
description
Signal and System I The representation of continuous-time signals in terms of impulse Properties of LIT systems Commutative property Distributive property
Transcript of 16.362 Signal and System I The representation of discrete-time signals in terms of impulse Example.

16.362 Signal and System I • The representation of discrete-time signals in terms of impulse
]0[][]0[ xnx
k
knkxnx ][][][
][][][ kxknkx
]1[]1[]1[ xnx
0
][
][][][
k
k
kn
knkunu
Example

16.362 Signal and System I • The representation of discrete-time signals in terms of impulse
k
knkxnx ][][][
][n ][nh ][][ nhny
k
knkxnx ][][][
k
k
knxkh
knhkxny
][][
][][][
][][][ nxnhny
][][][ nhnxny
Convolution

16.362 Signal and System I • The representation of continuous-time signals in terms of impulse
')'()'()( dttttxtx
')'()'()( dttthtxty
)()()( txthty
• Properties of LIT systems
Commutative property
)()()( txthty
)()()( thtxty
Distributive property
)()()()(
)()()()(
21
21
txthtxthtxththty

16.362 Signal and System I • Properties of LIT systems
Associative property
)()()(
)()()()()()()(
21
21
21
txththtxththtxththty
Causality
,0)( th for t<0.
,0][ nh for n<0.
Stability
dtth )(
n
nh ][

16.362 Signal and System I • The unit step response of an LTI system
][n ][nh ][ny
][nu ][nh ][ns
k
knhkny ][][][
][
][][][
nh
knkhnyk
n
k
k
kh
knukhns
][
][][][

16.362 Signal and System I • The unit step response of an LTI system
][nu ][nh ][1 ns
n
k
khns ][][1
]1[ nu ][nh ][2 ns
1
2
][
]1[][][
n
k
k
kh
knukhns
]1[][][ 1
1
2
nskhnsn
k
][]1[][ 11 nhnsns

16.362 Signal and System I • The unit step response of an LTI system
][n ][nh ][nh
][nu ][nh ][ns ][]1[][ nhnsns

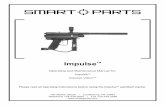
16.362 Signal and System I • Linear constant-coefficient difference equations
][nx
][]1[21][ nxnyny
?][ ny ?][ nh
][ny depends on x[n]. We don’t know y[n] unless x[n] is given.
But h[n] doesn’t depend on x[n]. We should be able to obtain h[n] without x[n].
How?• Discrete Fourier transform, --- Ch. 5.
• LTI system response properties, this chapter.
][nh
][ny
21
+
delay

16.362 Signal and System I • Linear constant-coefficient difference equations
][]1[21][ nxnyny
][]1[21][ nnhnh
]1[21][ nhnh
][]1[21][ nnhnh
When n 1, 21
]1[][
nhnh
n
Anh
21][
][21][ nuAnh
n
Causality
][n
][nh
][nh
21
+
delay

16.362 Signal and System I • Linear constant-coefficient difference equations
][n
][nh
][nh
21
][]1[21][ nxnyny +
][]1[21][ nnhnh delay
][]1[21][ nnhnh
][21][ nuAnh
n
Determine A by initial condition:
When n = 0, 1]0[]0[ h
]0[21]0[
0
uAh
A = 1

16.362 Signal and System I • Linear constant-coefficient difference equations
]1[ n ][]1[21][ nxnyny
][]1[21][ nnhnh
][21][ nunh
n
?][ ny
Two ways:
(1) Repeat the procedure
(2) ][][][ nhnxny
]1[21
]1[][]1[][
1
nu
nhnhnny
n
][nh
][nh
21
+
delay

16.362 Signal and System I • The unit step response of an LTI system, continuous time
)(t )(th )(ty
)(tu )(th )(ts
)(
)()()(
th
dnhty
)()( thdttds
t
dh
dtuhts
)(
)()()(

16.362 Signal and System I • Linear constant-coefficient difference equations
)(tx)(
21
21)( txdtdyty
?)( ty ?)( th
)(ty depends on x(t). We don’t know y(t) unless x(t) is given.
But h(t) doesn’t depend on x(t). We should be able to obtain h(t) without x(t).
How?• Continuous time Fourier transform.
• LTI system response properties, this chapter.
)()(2 txtydtdy
)(th
)(ty
21
+
dtd
21

16.362 Signal and System I • Linear constant-coefficient difference equations
)(t
When t>0,dtdyty
21)( tAety 2)(
Determine A by initial condition:
)()( 2 tuAeth t
Causality
)(21
21)( txdtdyty
)(21
21)( tdtdyty
)(21
21)( tdtdyty
)(th
)(ty
21
+
dtd
21

16.362 Signal and System I • Linear constant-coefficient difference equations
Determine A by initial condition:
)()( 2 tuAeth t
)(21)()
21()()2(
21)( 222 ttAetuAetuAe ttt
A = 1 )()( 2 tueth t
)(t)(
21
21)( txdtdyty
)(21
21)( tdtdyty
)(th
)(ty
21
+
dtd
21

16.362 Signal and System I • Linear constant-coefficient difference equations
)()( 3 tuKetx t
][5
][
)]()[(
)()(
)()()(
23
52
)(23
)(23
tt
t
o
t
t
o
t
t
eeK
deKe
deKe
dtueuKe
dthx
thtxty
)(th
)(ty
21
)(21
21)( txdtdyty +
dtd
21
)()( 2 tueth t
)(][5
)( 23 tueeKty tt

16.362 Signal and System I • Singularity functions
)()(0 ttu Define:
dttdtu )()(1
n
n
n dttdtu )()(
)()()(1 tudtut
du
dtuu
tututu
t
)(
)()(
)()()( 112
du
tutututut
n
n
)(
)()()()(
)1(

16.362 Signal and System I • Singularity functions
)()()()()( 0 txttxtutx
dtdx
tudtdx
dtdtdxu
tdxuutx
dutx
dtxututx
)(
)()()(
)()(|)()(
)()(
)()()()(
0
0
00
0
11
n
n
n dttxdtutx )()()(
dttdxtutx )()()( 1
)()()( 0 txtutx

16.362 Signal and System I • Singularity functions
n
n
n dttxdtutx )()()(
dttdxtutx )()()( 1
)()()( 0 txtutx )()()()( 21
11 tudttdututu
)()()()( 111 tutututu k
k terms

16.362 Signal and System I • Singularity functions
dx
dtux
tutxtutx
t
)(
)()(
)()()()( 1
n
n
n dttxdtutx )()()(
t
dxtutx )()()( 1
)()()( 0 txtutx
ddx
tudx
tututxtutx
t
t
')'(
)()(
)()()()()( 2
)()()(2 tututu

16.362 Signal and System I • Singularity functions --- discrete time
]1[][][1 nnnu Define:
]1[][][ 11 nununu kkk
]1[][]1[][][][][][ 1
nxnxnnxnnxnunx
]1[][][][ 1111 nunununu
]1[][][][ 1 nxnxnunx

16.362 Signal and System I • Singularity functions --- discrete time
][][1 nunu
Define:
1][][][
][][][ 112
n
kk
nkuknuku
nununu
n
kx
knukx
nunxnunx
][
][][
][][][][ 1