
12. Longitudinal - 2016 - Princeton Universitystengel/MAE331Lecture12.pdfyy "!= q Nonlinear Dynamic...
30
Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 2016 • 6 th -order -> 4 th -order -> hybrid equations • Dynamic stability derivatives • Long-period (phugoid) mode • Short-period mode Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE331.html http://www.princeton.edu/~stengel/FlightDynamics.html Reading: Flight Dynamics 452-464, 482-486 1 Learning Objectives Review Questions ! How do numerical integration algorithms work? ! What’s the difference between a “nominal” and an “actual” trajectory? ! What assumptions must be made to derive a set of linear differential equations from a set of nonlinear equations? ! How is a nonlinear spring modeled? ! What is a “Jacobian matrix”? ! Does the point of linearization have to be fixed? ! How are the equations of motion divided into longitudinal and lateral-directional sets? ! Why is it useful to do this? 2
-
Upload
nguyentram -
Category
Documents
-
view
217 -
download
2
Transcript of 12. Longitudinal - 2016 - Princeton Universitystengel/MAE331Lecture12.pdfyy "!= q Nonlinear Dynamic...
Linearized Longitudinal Equations of Motion!
Robert Stengel, Aircraft Flight Dynamics !MAE 331, 2016
•! 6th-order -> 4th-order -> hybrid equations•! Dynamic stability derivatives •! Long-period (phugoid) mode•! Short-period mode
Copyright 2016 by Robert Stengel. All rights reserved. For educational use only.http://www.princeton.edu/~stengel/MAE331.html
http://www.princeton.edu/~stengel/FlightDynamics.html
Reading:!Flight Dynamics!
452-464, 482-486!
1
Learning Objectives
Review Questions!!! How do numerical integration algorithms work?!!! What’s the difference between a “nominal” and an
“actual” trajectory?!!! What assumptions must be made to derive a set of
linear differential equations from a set of nonlinear equations?!
!! How is a nonlinear spring modeled?!!! What is a “Jacobian matrix”?!!! Does the point of linearization have to be fixed?!!! How are the equations of motion divided into
longitudinal and lateral-directional sets?!!! Why is it useful to do this?!
2

6th-Order Longitudinal Equations of Motion
Symmetric aircraftMotions in the vertical plane
Flat earth
x1x2x3x4x5x6
!
"
########
$
%
&&&&&&&&
= xLon6
!u = X /m ! gsin" ! qw!w = Z /m + gcos" + qu!xI = cos"( )u + sin"( )w!zI = !sin"( )u + cos"( )w
!q = M / Iyy!" = q
State Vector, 6 componentsNonlinear Dynamic Equations
Fairchild-Republic A-10
3
uwxzq!
"
#
$$$$$$$
%
&
'''''''
=
Axial VelocityVertical Velocity
RangeAltitude(–)Pitch RatePitch Angle
"
#
$$$$$$$$
%
&
''''''''
Range has no dynamic effectAltitude effect is minimal (air density variation)
4th-Order Longitudinal Equations of Motion
!u = f1 = X /m ! gsin" ! qw!w = f2 = Z /m + gcos" + qu
!q = f3 = M / Iyy!" = f4 = q
x1x2x3x4
!
"
#####
$
%
&&&&&
= xLon4
State Vector, 4 components
Nonlinear Dynamic Equations, neglecting range and altitude
4
uwq!
"
#
$$$$
%
&
''''
=
Axial Velocity, m/sVertical Velocity, m/sPitch Rate, rad/sPitch Angle, rad
"
#
$$$$$
%
&
'''''
Fourth-Order Hybrid Equations of Motion!
5
Transform Longitudinal Velocity Components
!u = f1 = X /m ! gsin" ! qw!w = f2 = Z /m + gcos" + qu
!q = f3 = M / Iyy!" = f4 = q
x1x2x3x4
!
"
#####
$
%
&&&&&
=
uwq'
!
"
####
$
%
&&&&
=
Axial VelocityVertical Velocity
Pitch RatePitch Angle
!
"
#####
$
%
&&&&& 6
Replace Cartesian body components of velocity by polar inertial components

Transform Longitudinal Velocity Components
!V = f1 = T cos ! + i( )" D "mgsin#$% &' m
!# = f2 = T sin ! + i( ) + L "mgcos#$% &' mV!q = f3 = M / Iyy!( = f4 = q
x1x2x3x4
!
"
#####
$
%
&&&&&
=
V'q(
!
"
####
$
%
&&&&
=
VelocityFlight Path Angle
Pitch RatePitch Angle
!
"
#####
$
%
&&&&&
i = Incidence angle of the thrust vectorwith respect to the centerline
7
Hawker P1127 Kestral
Replace Cartesian body components of velocity by polar inertial components
Hybrid Longitudinal Equations of Motion
!V = f1 = T cos ! + i( )" D "mgsin#$% &' m
!# = f2 = T sin ! + i( ) + L "mgcos#$% &' mV!q = f3 = M / Iyy!( = f4 = q
x1x2x3x4
!
"
#####
$
%
&&&&&
=
V'q(
!
"
####
$
%
&&&&
=
VelocityFlight Path Angle
Pitch RatePitch Angle
!
"
#####
$
%
&&&&& 8
•! Replace pitch angle by angle of attack ! = " # $

Hybrid Longitudinal Equations of Motion
!V = f1 = T cos ! + i( )" D "mgsin#$% &' m
!# = f2 = T sin ! + i( ) + L "mgcos#$% &' mV!q = f3 = M / Iyy
!! = !( " !# = f4 = q " f2 = q "1mV
T sin ! + i( ) + L "mgcos#$% &'
x1x2x3x4
!
"
#####
$
%
&&&&&
=
V'q(
!
"
####
$
%
&&&&
=
VelocityFlight Path Angle
Pitch RateAngle of Attack
!
"
#####
$
%
&&&&&
•! Replace pitch angle by angle of attack ! = " # $
! =" +# 9
Why Transform Equations and State Vector?
Velocity and flight path angle typically have slow variations
Pitch rate and angle of attack typically have quicker variations
x1x2x3x4
!
"
#####
$
%
&&&&&
=
V'q(
!
"
####
$
%
&&&&
=
VelocityFlight Path Angle
Pitch RateAngle of Attack
!
"
#####
$
%
&&&&&
10
Coupling typically small

Small Perturbations from Steady Path
!x(t) = !xN (t)+ !!x(t)" f[xN (t),uN (t),wN (t),t]+ F t( )!x(t)+G t( )!u(t)+L t( )!w(t)
11
!xN (t) ! 0 " f[xN (t),uN (t),wN (t),t]#!x(t) " F#x(t)+G#u(t)+L#w(t)
Steady, Level Flight
Rates of change are “small”
Nominal Equations of Motion in Equilibrium (Trimmed Condition)
!xN (t) = 0 = f[xN (t),uN (t),wN (t),t]
!VN = 0 = f1 = T cos !N + i( )" D "mgsin# N$% &' m
!# N = 0 = f2 = T sin !N + i( ) + L "mgcos# N$% &' mVN!qN = 0 = f3 = M Iyy
!!N = 0 = f4 = 0( )" 1mVN
T sin !N + i( ) + L "mgcos# N$% &'
T, D, L, and M contain state, control, and disturbance effects
xNT = VN ! N 0 "N
#$
%&
T= constant
12(See Supplemental Material for trimmed solution)

Small Perturbations from Steady Path Approximated by Linear Equations
13
Linearized Equations of Motion
!!xLon =
! !V! !"! !q! !#
$
%
&&&&&
'
(
)))))
= FLon
!V!"!q!#
$
%
&&&&
'
(
))))
+GLon
!*T!*E"
$
%
&&&
'
(
)))+"
Linearized !Equations of Motion!
14
Phugoid (Long-Period) Motion!
Short-Period Motion!

Approximate Decoupling of Fast and Slow Modes of Motion
Hybrid linearized equations allow the two modes to be examined separately
FLon =FPh FSP
Ph
FPhSP FSP
!
"##
$
%&&
Effects of phugoid perturbations on phugoid motion
Effects of phugoid perturbations on
short-period motion
Effects of short-period perturbations on phugoid motion
Effects of short-period perturbations on short-
period motion
=FPh smallsmall FSP
!
"##
$
%&&'
FPh 00 FSP
!
"##
$
%&& 15
Sensitivity Matrices for Longitudinal LTI Model
!!xLon (t) = FLon!xLon (t) +GLon!uLon (t) + LLon!wLon (t)
FLon =
F11 F12 F13 F14F21 F22 F23 F24F31 F32 F33 F34F41 F42 F43 F44
!
"
#####
$
%
&&&&&
GLon =
G11 G12 G13G21 G22 G23
G31 G32 G33
G41 G42 G43
!
"
#####
$
%
&&&&&
LLon =
L11 L12L21 L22L31 L32L41 L42
!
"
#####
$
%
&&&&&
16

Velocity Dynamics
!V = f1 =1mT cos! " D "mgsin#[ ]
= 1m
CT cos!$V 2
2S "CD
$V 2
2S "mgsin#%
&'
(
)*
First row of nonlinear equation
First row of linearized equation
! !V (t) = F11!V (t)+ F12!" (t)+ F13!q(t)+ F14!# (t)[ ]+ G11!$E(t)+G12!$T (t)+G13!$F(t)[ ]
+ L11!Vwind + L12!#wind[ ]
17
F11 =1m
CTVcos!N "CDV( ) #NVN
2
2S + CTN
cos!N "CDN( )#NVNS$
%&
'
()
Coefficients in first row of F
Sensitivity of Velocity Dynamics to State Perturbations
CTV!"CT
"V
CDV!"CD
"V
CDq!"CD
"q
CD#!"CD
"#
!V = CT cos! "CD( ) #V
2
2S "mgsin$
%
&'
(
)* m
18
F12 = !gcos" N
F13 =!1m
CDq
"NVN2
2S#
$%
&
'(
F14 =!1m
CTNsin"N +CD"( ) #NVN
2
2S$
%&
'
()
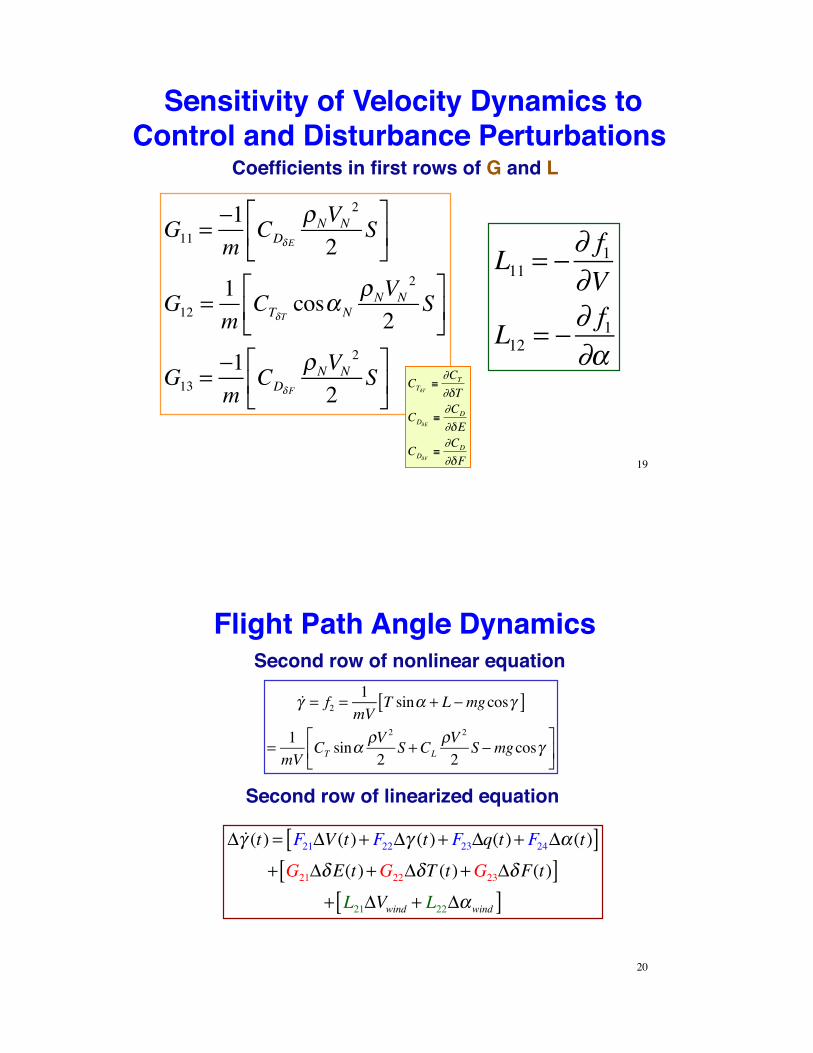
Sensitivity of Velocity Dynamics to Control and Disturbance Perturbations
G11 =!1m
CD"E
#NVN2
2S$
%&
'
()
G12 =1m
CT"Tcos*N
#NVN2
2S$
%&
'
()
G13 =!1m
CD"F
#NVN2
2S$
%&
'
()
Coefficients in first rows of G and L
L11 = ! " f1"V
L12 = ! " f1"#
CT!T"#CT
#!T
CD!E"#CD
#!E
CD!F"#CD
#!F 19
Flight Path Angle Dynamics
Second row of linearized equation
!! = f2 =1mV
T sin" + L #mgcos![ ]
= 1mV
CT sin"$V 2
2S +CL
$V 2
2S #mgcos!%
&'
(
)*
! !" (t) = F21!V (t)+ F22!" (t)+ F23!q(t)+ F24!# (t)[ ]+ G21!$E(t)+G22!$T (t)+G23!$F(t)[ ]
+ L21!Vwind + L22!#wind[ ]
20
Second row of nonlinear equation

F21 =1
mVNCTV
sin!N +CLV( ) "NVN2
2S + CTN
sin!N +CLN( )"NVNS#
$%
&
'(
) 1mVN
2 CTNsin!N +CLN( ) "NVN
2
2S )mgcos* N
#
$%
&
'(
Coefficients in second row of F
Sensitivity of Flight Path Angle Dynamics to State Perturbations
CTV!"CT
"V
CLV!"CL
"V
CLq!"CL
"q
CL#!"CL
"#
!! = CT sin" +CL( ) #V
2
2S $mgcos!
%
&'
(
)* mV
21
F22 = gsin! N VN
F23 =1
mVNCLq
!NVN2
2S"
#$
%
&'
F24 =1
mVNCTN
cos!N +CL!( ) "NVN2
2S#
$%
&
'(
Pitch Rate Dynamics
!q = f3 =
MIyy
=Cm !V 2 2( )Sc
Iyy
Third row of nonlinear equation
Third row of linearized equation
! !q(t) = F31!V (t)+ F32!" (t)+ F33!q(t)+ F34!# (t)[ ]+ G31!$E(t)+G32!$T (t)+G33!$F(t)[ ]
+ L31!Vwind + L32!#wind[ ]
22

F31 =1Iyy
CmV
!NVN2
2Sc +CmN
!NVNSc"
#$
%
&'
Coefficients in third row of F
Sensitivity of Pitch Rate Dynamics to State Perturbations
CmV!"Cm
"V
Cmq!"Cm
"q
Cm#!"Cm
"#
!q =Cm !V 2 2( )Sc Iyy
23
F32 = 0
F33 =1Iyy
Cmq
!NVN2
2Sc"
#$
%
&'
F34 =1Iyy
Cm!
"NVN2
2Sc#
$%
&
'(
Angle of Attack Dynamics
!! = f4 = !" # !$ = q #
1mV
T sin! + L # mgcos$[ ]
Fourth row of nonlinear equation
Fourth row of linearized equation
! !" (t) = F41!V (t)+ F42!# (t)+ F43!q(t)+ F44!" (t)[ ]+ G41!$E(t)+G42!$T (t)+G43!$F(t)[ ]+ L41!Vwind + L42!"wind[ ]
24
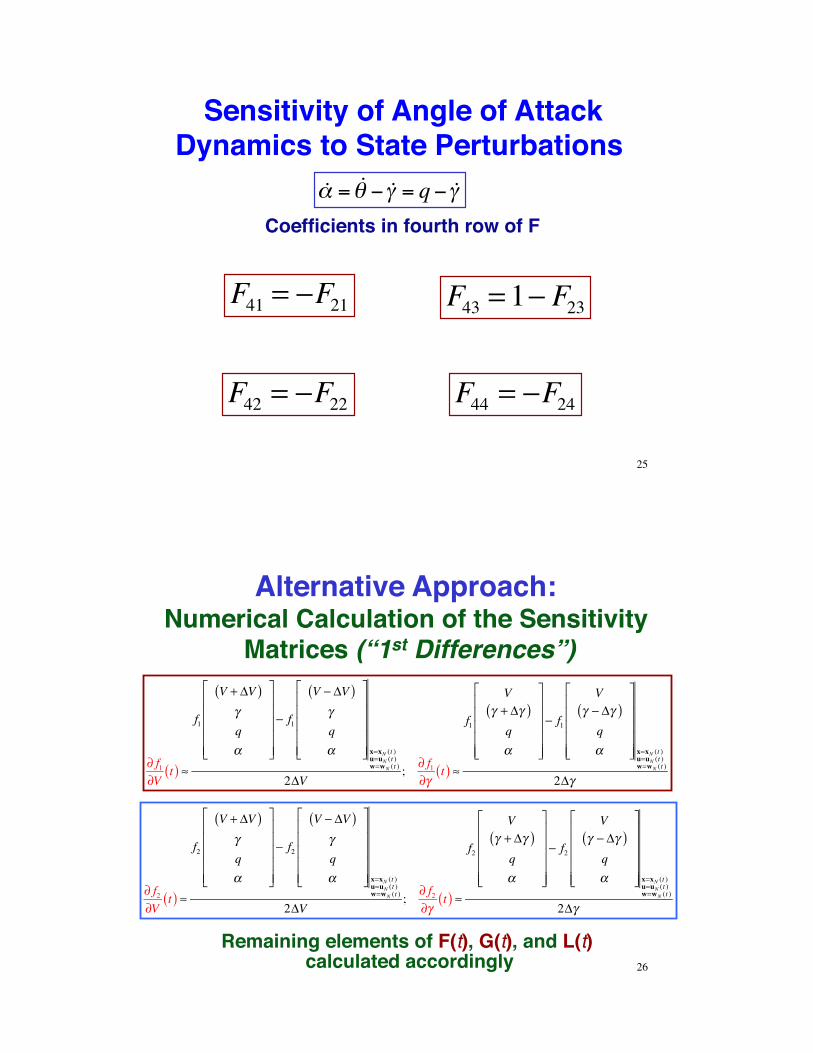
F41 = !F21
Coefficients in fourth row of F
Sensitivity of Angle of Attack Dynamics to State Perturbations
F43 = 1! F23
!! =!" # !$ = q# !$
25
F42 = !F22 F44 = !F24
Alternative Approach: Numerical Calculation of the Sensitivity
Matrices (“1st Differences”)
! f1!V
t( ) "
f1
V + #V( )$q%
&
'
(((((
)
*
+++++
, f1
V , #V( )$q%
&
'
(((((
)
*
+++++ x=xN (t )u=uN (t )w=wN (t )
2#V; ! f1
!$t( ) "
f1
V$ + #$( )q%
&
'
(((((
)
*
+++++
, f1
V$ , #$( )q%
&
'
(((((
)
*
+++++ x=xN (t )u=uN (t )w=wN (t )
2#$
26
Remaining elements of F(t), G(t), and L(t) calculated accordingly
! f2!V
t( ) "
f2
V + #V( )$q%
&
'
(((((
)
*
+++++
, f2
V , #V( )$q%
&
'
(((((
)
*
+++++ x=xN (t )u=uN (t )w=wN (t )
2#V; ! f2
!$t( ) "
f2
V$ + #$( )q%
&
'
(((((
)
*
+++++
, f2
V$ , #$( )q%
&
'
(((((
)
*
+++++ x=xN (t )u=uN (t )w=wN (t )
2#$

Dimensional Stability and Control Derivatives!
27
Dimensional Stability-Derivative Notation
!! Redefine force and moment symbols as acceleration symbols
!! Dimensional stability derivatives portray acceleration sensitivities to state perturbations
Dragmass (m)
! D " !V
Liftmass
! L "V !#
Momentmoment of inertia (Iyy )
! M " !q
28
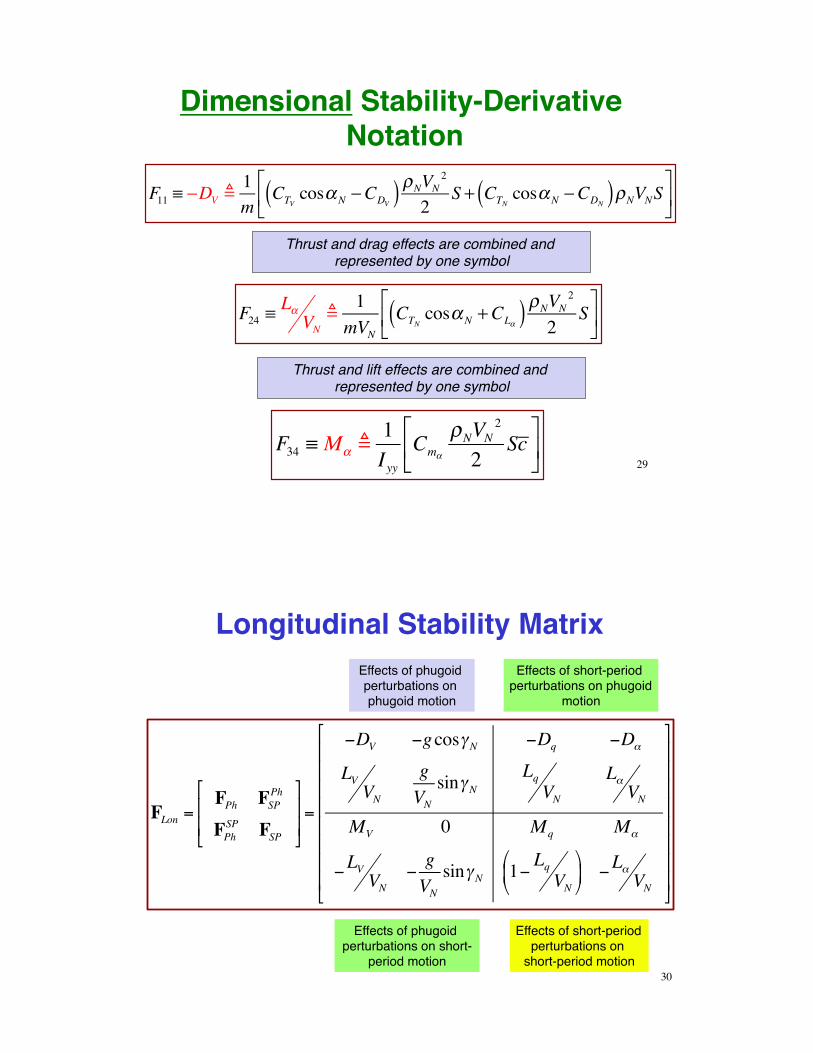
Dimensional Stability-Derivative Notation
F11 ! "DV !
1m
CTVcos#N "CDV( ) $NVN
2
2S + CTN
cos#N "CDN( )$NVNS%
&'
(
)*
F24 !
L"VN!
1mVN
CTNcos"N +CL"( ) #NVN
2
2S$
%&
'
()
F34 ! M" !
1Iyy
Cm"
#NVN2
2Sc$
%&
'
()
Thrust and drag effects are combined and represented by one symbol
Thrust and lift effects are combined and represented by one symbol
29
Longitudinal Stability Matrix
FLon =FPh FSP
Ph
FPhSP FSP
!
"
##
$
%
&&=
'DV 'gcos(N 'Dq 'D)
LVVN
gVNsin(N
LqVN
L)VN
MV 0 Mq M)
'LV VN'gVNsin(N 1' Lq VN
*
+,
-
./ 'L) VN
!
"
########
$
%
&&&&&&&&
Effects of phugoid perturbations on phugoid motion
Effects of phugoid perturbations on short-
period motion
Effects of short-period perturbations on phugoid
motion
Effects of short-period perturbations on
short-period motion30

Curtiss Autocar, 1917 Waterman Arrowbile, 1935
ConsolidatedVultee 111, 1940sStout Skycar, 1931
31
Hallock Road Wing , 1957
ConvAIRCAR 116 (w/Crosley auto), 1940s Taylor AirCar, 1950s
32

Mitzar SkyMaster Pinto, 1970s
Haynes Skyblazer, concept, 2004
Lotus Elise Aerocar, concept, 2002
33
Aeromobil, 2014
Pinto separated from the airframe. Two killed. Proposed, not built.
Proposed, not built.Aircraft entered a spin, ballistic
parachute was deployed. No fatality.
Terrafugia Transition
… or, for the same price
Terrafugia TF-X, concept
PLUS
Jaguar F Type
34
Tecnam Astore

Comparison of 2nd- and 4th-Order Model Response!
35
0 - 100 sec•! Reveals Phugoid Mode
4th-Order Initial-Condition Responses of Business Jet at Two Time Scales
0 - 6 sec•! Reveals Short-Period Mode
Plotted over different periods of time4 initial conditions [V(0), !(0), q(0), "(0)]
36

2nd-Order Models of Longitudinal Motion
Approximate Phugoid Equation
!!xPh =
! !V! !"
#
$%%
&
'(()
*DV *gcos" N
LVVN
gVNsin" N
#
$
%%%
&
'
(((
!V!"
#
$%%
&
'((
+T+TL+T
VN
#
$
%%%
&
'
(((!+T +
*DV
LVVN
#
$
%%%
&
'
(((!Vwind
Assume off-diagonal blocks of (4 x 4) stability matrix are negligible
FLon =FPh ~ 0~ 0 FSP
!
"##
$
%&&
37
2nd-Order Models of Longitudinal Motion
!!xSP =
! !q! !"
#
$%%
&
'(()
Mq M"
1* Lq VN+,-
./0 * L"
VN
#
$
%%%
&
'
(((
!q!"
#
$%%
&
'((
+M1E
*L1EVN
#
$
%%%
&
'
(((!1E +
M"
*L"VN
#
$
%%%
&
'
(((!"wind
Approximate Short-Period Equation
FLon =FPh ~ 0~ 0 FSP
!
"##
$
%&&
38

Comparison of Bizjet 4th- and 2nd-Order Model Responses
39
4th Order,4 initial conditions
[V(0), !(0), q(0), "(0)]
2nd Order,2 initial conditions
[V(0), !(0)]
Phugoid Time Scale, ~100 s
Short-Period Time Scale, ~10 s
Comparison of Bizjet 4th- and 2nd-Order Model Responses
40
4th Order,4 initial conditions
[V(0), !(0), q(0), "(0)]
2nd Order,2 initial conditions
[q(0), "(0)]

Approximate Phugoid Response to a 10% Thrust Increase
What is the steady-state response?41
Approximate Short-Period Response to a 0.1-Rad Pitch Control Step Input
Pitch Rate, rad/s Angle of Attack, rad
42
What is the steady-state response?

Normal Load Factor Response to a 0.1-Rad Pitch Control Step Input
Normal Load Factor, g s at c.m.Aft Pitch Control (Elevator)
Normal Load Factor, g s at c.m.Forward Pitch Control (Canard)
!nz =
VNg
! !" # !q( ) = VNg
L"
VN!" + L$E
VN!$E
%&'
()*
•! Normal load factor at the center of mass
•! Pilot focuses on normal load factor during rapid maneuvering
Grumman X-29
43
Next Time:!Lateral-Directional Dynamics!
Reading:!Flight Dynamics!
574-591!
44
Learning Objectives
•! 6th-order -> 4th-order -> hybrid equations•! Dynamic stability derivatives •! Dutch roll mode•! Roll and spiral modes

SSuupppplleemmeennttaall MMaatteerriiaall
45
Trimmed Solution of the Equations of Motion!
46

Flight Conditions for Steady, Level Flight
!V = f1 =1m
T cos ! + i( ) " D " mgsin#$% &'
!# = f2 =1mV
T sin ! + i( ) + L " mgcos#$% &'
!q = f3 = M / Iyy
!! = f4 = !( " !# = q "1mV
T sin ! + i( ) + L " mgcos#$% &'
Nonlinear longitudinal model
Nonlinear longitudinal model in equilibrium
0 = f1 =1m
T cos ! + i( ) " D " mgsin#$% &'
0 = f2 =1mV
T sin ! + i( ) + L " mgcos#$% &'
0 = f3 = M / Iyy
0 = f4 = !( " !# = q "1mV
T sin ! + i( ) + L " mgcos#$% &' 47
Numerical Solution for Level Flight Trimmed Condition
•!Specify desired altitude and airspeed, hN and VN•!Guess starting values for the trim parameters, !!T0, !!E0, and ""0•!Calculate starting values of f1, f2, and f3
•! f1, f2, and f3 = 0 in equilibrium, but not for arbitrary !!T0, !!E0, and ""0•!Define a scalar, positive-definite trim error cost function, e.g.,
f1 = !V = 1m
T !T ,!E," ,h,V( )cos # + i( )$ D !T ,!E," ,h,V( )%& '(
f2 = !) = 1mVN
T !T ,!E," ,h,V( )sin # + i( ) + L !T ,!E," ,h,V( )$mg%& '(
f3 = !q = M !T ,!E," ,h,V( ) / Iyy
J !T ,!E,"( ) = a f12( )+b f2
2( )+ c f32( )
48

Minimize the Cost Function with Respect to the Trim Parameters
Cost is minimized at bottom of bowl, i.e., when
! J!"T
! J!"E
! J!#
$
%&
'
()= 0
Error cost is bowl-shaped
Search to find the minimum value of J
J !T ,!E,"( ) = a f12( )+b f2
2( )+ c f32( )
49
Example of Search for Trimmed Condition (Fig. 3.6-9, Flight Dynamics)
In MATLAB, use fminsearch to find trim settings
!T*,!E*," *( ) = fminsearch J, !T ,!E,"( )#$ %&50

Elements of the Stability Matrix
! f1!V
" #DV ;! f1!$
= #gcos$ N ;! f1!q
" #Dq;! f1!%
" #D%
! f2!V
" LV VN; ! f2
!#=gVNsin# N ;
! f2!q
"LqVN; ! f2
!$" L$ VN
! f3!V
" MV ;! f3!#
= 0; ! f3!q
" Mq;! f3!$
" M$
! f4!V
" # LV VN; ! f4
!$= #
gVNsin$ N ;
! f4!q
" 1# Lq VN; ! f4
!%" # L% VN
Stability derivatives portray acceleration sensitivities to state perturbations
51
! f2!"E
=1
mVNCL"E
#VN2
2S
$
%&
'
()
! f2!"T
=1
mVNCT"T
sin*N#VN
2
2S
$
%&
'
()
! f2!"F
=1
mVNCL"F
#VN2
2S
$
%&
'
()
! f2!Vwind
= "! f2!V
! f2!#wind
= "! f2!#
Control and Disturbance Sensitivities in Flight Path Angle, Pitch Rate, and
Angle-of-Attack Dynamics! f3!"E
=1Iyy
Cm"E
#VN2
2Sc
$
%&
'
()
! f3!"T
=1Iyy
Cm"T
#VN2
2Sc
$
%&
'
()
! f3!"F
=1Iyy
Cm"F
#VN2
2Sc
$
%&
'
()
! f3!Vwind
= "! f3!V
! f3!#wind
= "! f3!#
! f4!"E
= #! f2!"E
! f4!"T
= #! f2!"T
! f4!"F
= #! f2!"F
! f4!Vwind
=! f2!V
! f3!"wind
=! f2!" 52

Velocity-Dependent Derivative Definitions
Air compressibility effects are a principal source of velocity dependence
CDM!"CD
"M=
"CD
" V / a( )= a "CD
"V
CDV!"CD
"V=1a#
$%&
'(CDM
CLV!"CL
"V=1a#
$%&
'(CLM
CmV!"Cm
"V=1a#
$%&
'(CmM
CDM! 0
CDM> 0 CDM
< 0
a = Speed of Sound
M = Mach number = V a
53
Wing Lift and Moment Coefficient Sensitivity to Pitch Rate
Straight-wing incompressible flow estimate (Etkin)CLq̂wing
= !2CL"winghcm ! 0.75( )
Cmq̂wing= !2CL"wing
hcm ! 0.5( )2
Straight-wing supersonic flow estimate (Etkin)CLq̂wing
= !2CL"winghcm ! 0.5( )
Cmq̂wing= ! 2
3 M 2 !1! 2CL"wing
hcm ! 0.5( )2
Triangular-wing estimate (Bryson, Nielsen)
CLq̂wing= ! 2"
3CL#wing
Cmq̂wing= ! "
3AR54

Control- and Disturbance-Effect Matrices
•! Control-effect derivatives portray acceleration sensitivities to control input perturbations
•! Disturbance-effect derivatives portray acceleration sensitivities to disturbance input perturbations
GLon =
!D"E T"T !D"F
L"E /VN L"T /VN L"F /VNM"E M"T M"F
!L"E /VN !L"T /VN !L"F /VN
#
$
%%%%%
&
'
(((((
LLon =
!DVwind!D"wind
LVwind /VN L"wind /VNMVwind
M"wind
!LVwind /VN !L"wind /VN
#
$
%%%%%%
&
'
(((((( 55
Primary Longitudinal Stability Derivatives
DV !
!1m
CTV!CDV( ) "VN
2
2S+ CTN
!CDN( )"VNS#
$%
&
'(
Small angle assumptions
LVVN!
1mVN
CLV
!VN2
2S + CLN
!VNS"
#$
%
&' (
1mVN
2 CLN
!VN2
2S ( mg
"
#$
%
&'
Mq =1Iyy
Cmq
!VN2
2Sc
"
#$
%
&' M! =
1Iyy
Cm!
"VN2
2Sc
#
$%
&
'(
L!VN!
1mVN
CTN+ CL!( ) "VN
2
2S
#
$%
&
'(
56
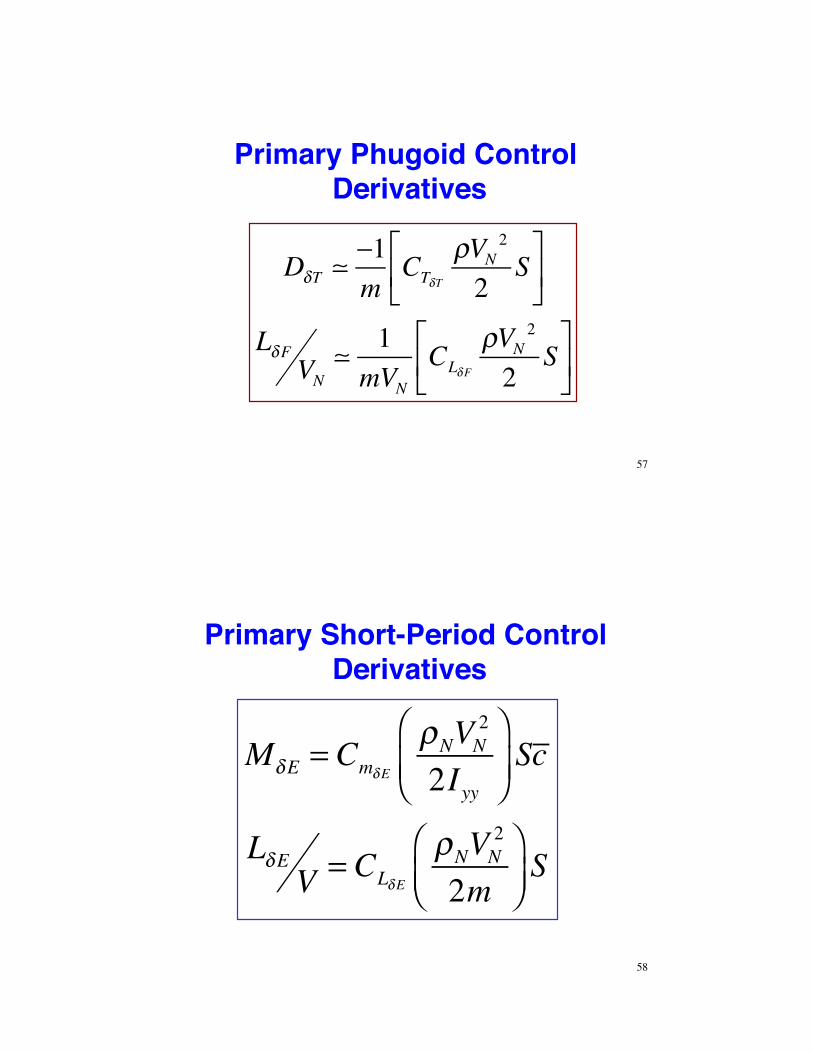
Primary Phugoid Control Derivatives
D!T !"1m
CT!T
#VN2
2S$
%&
'
()
L!FVN!
1mVN
CL!F
#VN2
2S$
%&
'
()
57
Primary Short-Period Control Derivatives
M!E = Cm!E
"NVN2
2Iyy
#
$%&
'(Sc
L!EV = CL!E
"NVN2
2m#$%
&'(S
58

Flight Motions
Dornier Do-128 Short-Period Demonstrationhttp://www.youtube.com/watch?v=3hdLXE0rc9Q
Dornier Do-128D
Dornier Do-128 Phugoid Demonstrationhttp://www.youtube.com/watch?v=jzxtpQ30nLg&feature=related
59


















