1/14 Development and Evaluation of Prototype Flight Deck Systems for Distributed Air-Ground Traffic...
14
1/14 Development and Evaluation of Prototype Flight Deck Systems for Distributed Air-Ground Traffic Management ASAS Thematic Network - Workshop 3 Toulouse, France April 19-21, 2004 Richard Barhydt NASA Langley Research Center
-
Upload
candice-shaw -
Category
Documents
-
view
215 -
download
0
Transcript of 1/14 Development and Evaluation of Prototype Flight Deck Systems for Distributed Air-Ground Traffic...

1/14
Development and Evaluation of Prototype Flight Deck Systems for Distributed Air-Ground Traffic Management
ASAS Thematic Network - Workshop 3Toulouse, FranceApril 19-21, 2004
Richard BarhydtNASA Langley Research Center

2/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
Distributed Air/Ground Traffic Management (DAG-TM)
Long range focus designed to significantly improve system capacity while maintaining or improving safety.
Autonomous aircraft flying under “Autonomous Flight Rules” (AFR) responsible for maintaining separation from all other traffic (AFR and IFR), while meeting traffic flow management constraints.
Air traffic service provider continues to provide traffic separation between IFR aircraft and assigns constraints to all aircraft for flow management.– Distributing separation responsibilities to AFR aircraft
enables controllers to focus more on overall traffic flow management.
– Constraints (waypoint speed, altitude, or time) presumed to be assigned at TRACON entry point where all AFR traffic transitions to IFR.

3/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
Potential Incentives for DAG-TM Equipage
Removal of “flow control” ground-hold restrictions due to weather or ATC “saturation” (AFR flow control done through arrival time management).
Priority arrival slots at capacity-constrained airports. User flexibility to select desired route and altitude. Capabilities travel with airplane.
– Less dependence on local ground system infrastructure.– Presumes ADS-B out or TIS-B.

4/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
En Route Operations Research Platform
Air Traffic Operations Lab at NASA Langley used as research platform for airborne concept, procedures and prototype systems development and evaluation.
Personal Computer (PC)-based aircraft workstations leverage existing systems and projected capabilities.– Simulated ADS-B used to exchange state and intent
information between pilot stations and ground system. Considers real-world limitations (message format, probability of
reception vs. range, update interval). Based heavily on industry standards (ADS-B MASPS,
RTCA/DO-242A).
– Modeled ARINC 429 data buses used for information exchange within aircraft simulation.
– Autonomous Operations Planner (AOP) provides separation assurance services to flight crew - integrates with existing aircraft systems, displays, and controls.

5/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
AOP Design Features
Provides conflict detection, prevention, and resolution services.– Considers traffic conflicts and airspace hazards (special use
airspace and hazardous weather areas), aircraft performance limitations, flow management constraints.
AOP incorporates human factors design principles:– Commands linked directly to DAG-TM pilot procedures:
Recognize and resolve conflicts with all other aircraft. Avoid maneuvers that create near-term conflicts.
– Information consistent with existing flight deck systems and aircraft control states:
Color conventions for status information, alerts, and warnings. Resolutions correspond to current aircraft flight mode (Mode
Control Panel or Flight Management Computer).
– Status information on nearby traffic can be turned on/off.

6/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
AOP Design Features
Considers real-world complexities associated with trajectory generation and intent information management:– Uses command trajectory as basis for ASAS functions.
Predicted path that aircraft will fly assuming pilot does not change automation modes or settings.
Recommended by various forums (FAA/Eurocontrol Intent TIM, RTCA ADS-B MASPS).
– Considers aircraft dynamics, winds, and integrates target states from multiple aircraft systems: Flight Management Computer (FMC) Control Display Unit (CDU) Mode Control Panel (MCP) Flight Control Computer (FCC)

7/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
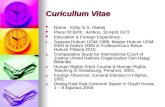
B-777 Style Navigation Display with Conflict
Resolution Uploaded
to FMC
Loss of Separation
Region
Ownship
Intruder

8/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
DAG-TM Concept (Terminal Area)
Concept Goals:– Increase runway throughput while maintaining or improving
safety.– Leverage existing navigational procedures and aircraft
systems, displays, and controls.– Conduct operations without adversely affecting flight crew or
controller workload.– Effectively integrate aircraft with mixed equipage
capabilities.

9/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
DAG-TM Terminal Area Operations
Runway throughput improved by reducing threshold crossing delay time between aircraft (consistent with safety).
Airborne Merging and Spacing tool for Terminal Arrivals (AMSTAR) designed to reduce delay time by improving threshold crossing accuracy and precision:– Accuracy: time intervals closer to optimum spacing.– Precision: successive intervals have better consistency.– Provides speed commands needed to achieve desired
threshold crossing time behind preceding aircraft.

10/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
• Compensates for dissimilar final approach speeds between aircraft pairs.
• Includes wake vortex minima requirements.
• Compensates for wind changes encountered during approach.
• Speeds based on a nominal speed profile consistent with current day operations.
• Emphasizes low pilot workload and system stability.
–Speed changes given in 5 knot increments.–Speed commands kept within 10% of nominal speed profile.
• Provides smooth transition to desired final approach speed.
• Provides any necessary alerting.
AMSTAR Design Features

11/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
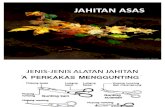
Nominal Speed Profile
Existing Procedure with Downwind Extension

12/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
Flight Crew Actions
Pilot engages PDS guidance
Pilot selects lead aircraft and enters
spacing data through CDU
90

13/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
Airborne Spacing Flight Evaluation
High fidelity simulator study:– Pilots achieved desired spacing
interval (mean values): Within 5 sec when following
speed guidance with MCP or manual throttles.
Within 1 sec when coupled to autothrottle.
Standard deviation within 2 sec. Flight test at Chicago O’Hare
with Langley B-757 research aircraft:– Widely varying winds (35+ knot
tailwind to headwind changes on final).
– Mean spacing performance within 1 sec of desired interval.
– Standard deviation ~ 8 sec.

14/14Richard Barhydt [email protected]
Distributed Air / Ground Traffic ManagementDistributed Air / Ground Traffic Management
Upcoming Studies
En Route and Arrival Operations:– Joint Experiment with NASA Ames Research Center.
Air/ground coordination with subject pilots and controllers. Will address concept scalability and mixed operations. Overflight and descent scenarios (with required time of arrival
at TRACON entry point.)
Terminal Area Operations:– Batch studies (effects of ADS-B range, wind prediction
accuracy, different aircraft types in stream).– Human-in-the-loop study (adaptability to different
airports/airspace, pilot workload, controller feedback).