GPS-E1 Evaluation Kit for GPS-MS1 and GPS-PS1 (GPS G1-E1-00001-C)

FundamentalsofGPSforhigh-precisiongeodesy
M.A.FloydMassachusettsInstituteofTechnology,Cambridge,MA,USA
GPSDataProcessingandAnalysiswithGAMIT/GLOBKandtrackAddisAbabaUniversity,Ethiopia24–25&27–29November2017
http://geoweb.mit.edu/~floyd/courses/gg/201711_AAU/MaterialfromR.W.King,T.A.Herring,M.A.Floyd(MIT)andS.C.McClusky (nowatANU)

Outline
• GPSObservables:• GPSdataandthecombinationsofphaseandpseudo-rangeused
• Modelingtheobservations:Aspectsnotwellmodeled• Multipathandantennaphasecentermodels• Atmosphericdelaypropagation
• LimitsofGPSaccuracy• Monumenttypes• Loading(morelater)• Orbitquality
2017/11/24 FundamentalsofGPSforgeodesy 1

InstantaneouspositioningwithGNSSpseudoranges
2017/11/24 FundamentalsofGPSforgeodesy 4
Receiversolution,teqc +qc orsh_rx2apr• Pointposition(svpos):5–100m• Differential(svdiff):1–10m
Your location is:37o 23.323’ N
122o 02.162’ W

Precisepositioningusingphasemeasurements• High-precisionpositioningusesthephaseobservations• Long-sessionstatic:trackingofchangeinphaseovertimecarriesmostoftheinformation• Theshorterthespanthemoreimportantisambiguityresolution
2017/11/24 FundamentalsofGPSforgeodesy 5Each satellite (and station) has a different signature
20000000
21000000
22000000
23000000
24000000
25000000
16.0 17.0 18.0 19.0 20.0 21.0 22.0 23.0 24.0
C1_07_(m)Theory_(m)C1_28_(m)Theory_(m)C1_26_(m)Theory_(m)C1_11_(m)Theory_(m)C1_02_(m)Theory_(m)Ra
nge
(m)
Time_Hrs

Observablesindataprocessing
FundamentalobservationsL1phase=f1 × range(λ =19cm)L2phase=f2 × range(λ =24cm)C1orP1pseudorangeusedseparatelytogetreceiverclockoffset(time)
ToestimateparametersusedoublydifferencedLC=2.55L1− 1.98L2“ionosphere-freephasecombination”(L1cycles)PC=2.55P1−1.55P2 “ionosphere-freerangecombination”(meters)
Doubledifferencing(DD)cancelsclockfluctuations;LCcancelsalmostallofionosphere.BothDDandLCamplifynoise(useL1andL2directlyandindependentlyforbaselines<1km)
Auxiliarycombinationsfordataeditingandambiguityresolution:“geometry-freecombination(LG)”or“extrawide-lane”(EX-WL)
LG=L2−f2/f1 L1(usedinGAMIT)EX-WL=L1−f1/f2 L2(usedinTRACK)Removesallfrequency-independenteffects(geometric&atmosphere)butnot
multipathorionosphereMelbourne-Wubbena wide-lane(MW-WL):phase/pseudorange combinationthat
removesgeometryandionosphere;dominatedbypseudorangenoiseMW-WL=N1−N2=(L1−L2)−(Df/Sf)(P1+P2)=(L1−L2)−0.12(P1+P2)
2017/11/24 FundamentalsofGPSforgeodesy 6

Modeling theobservationsI.Conceptual/Quantitative
• Motionofthesatellites• Earth’sgravityfield(flatteningeffectapprox.10km;higherharmonics100m)• AttractionofMoonandSun(100m)• Solarradiationpressure(20m)
• MotionoftheEarth• IrregularrotationoftheEarth(5m)• Luni-solarsolid-Earthtides(30cm)• Loadingduetotheoceans,atmosphere,andsurfacewaterandice(10mm)
• Propagationofthesignal• Neutralatmosphere(dry6m;wet1m)• Ionosphere(10mbutLCcorrectstoafewmmmostofthetime)• Variationsinthephasecenters ofthegroundandsatelliteantennas(10cm)
*incompletelymodeled
2017/11/24 FundamentalsofGPSforgeodesy 7

Modeling theobservationsII.Softwarestructure
• Satelliteorbit• IGStabulatedephemeris(Earth-fixedSP3file)[track]• GAMITtabulatedephemeris(t-file):numericalintegrationbyarc ininertialspace,fittoSP3file,mayberepresentedbyitsinitialconditions(ICs)andradiation-pressureparameters;requirestabulatedpositionsofSunandMoon
• MotionoftheEarthininertialspace[model ortrack]• Analyticalmodelsforprecessionandnutation(tabulated);IERSobservedvaluesforpoleposition(wobble),andaxialrotation(UT1)
• Analyticalmodelofsolid-Earthtides;globalgridsofoceanandatmospherictidalloading
• Propagationofthesignal[model ortrack]• Zenithhydrostatic(dry)delay(ZHD)frompressure(met-file,VMF1,orGPT)• Zenithwetdelay(ZWD)[crudelymodeled andestimatedinsolve ortrack]• ZHDandZWDmappedtoline-of-sightwithmappingfunctions(VMF1gridorGMF)
• Variationsinthephasecentersofthegroundandsatelliteantennas(ANTEXfile)
2017/11/24 FundamentalsofGPSforgeodesy 8

Parameterestimation
• Phaseobservations[solve ortrack]• FormdoubledifferenceLCcombinationofL1andL2tocancelclocks&ionosphere
• Applyaprioriconstraints• Estimatethecoordinates,ZTD,andreal-valuedambiguities• FormM-WWLand/orphaseWLwithionosphericconstraintstoestimateandresolvetheWL(N2−N1)integerambiguities[autcln (orsolve),track]
• Estimateandresolvethenarrow-lane(NL)ambiguities[solve,track]• EstimatethecoordinatesandZTDwithWLandNLambiguitiesfixed
• Estimationcanbebatchleastsquares[solve]orsequential(Kalman filter)[track]
• Quasi-observationsfromphasesolution(h-file)[globk]• Sequential(Kalman filter)• Epoch-by-epochtestofcompatibility(χ2 increment)butbatchoutput
2017/11/24 FundamentalsofGPSforgeodesy 9

LimitsofGPSaccuracy
• Signalpropagationeffects• Signalscattering(antennaphasecenter/multipath)• Atmosphericdelay(mainlywatervapor)• Ionosphericeffects• Receivernoise
• Unmodeledmotionsofthestation• Monumentinstability• Loadingofthecrustbyatmosphere,oceans,andsurfacewater
• Unmodeledmotionsofthesatellites• Referenceframe
2017/11/24 FundamentalsofGPSforgeodesy 10

LimitsofGPSAccuracy
• Signalpropagationeffects• Signalscattering(antennaphasecenter/multipath)• Atmosphericdelay(mainlywatervapor)• Ionosphericeffects• Receivernoise
• Unmodeled motionsofthestation• Monumentinstability• Loadingofthecrustbyatmosphere,oceans,andsurfacewater
• Unmodeled motionsofthesatellites• Referenceframe
2017/11/24 FundamentalsofGPSforgeodesy 11

Multipathisinterferencebetweenthedirectandafar-fieldreflectedsignal(geometricopticsapply)
2017/11/24 FundamentalsofGPSforgeodesy 12
• Avoid Reflective Surfaces• Use a Ground Plane Antenna • Avoid near-ground mounts• Observe for many hours• Remove with average from many days
To mitigate the effects:

Simple geometry for incidence of a direct and reflected signal
Multipath contributions to observed phase for three different antenna heights [From Elosegui et al, 1995]
0.15 m
Antenna Ht
0.6 m
1 m
2017/11/24 FundamentalsofGPSforgeodesy 13

Antennaphasepatterns
Moredangerousarenear-fieldsignalinteractionsthatchangetheeffectiveantennaphasecenter withtheelevationandazimuthoftheincomingsignal
Figures courtesy of UNAVCO
Left: Examples of the antenna phase patterns determined in an anechoic chamber…BUT the actual pattern in the field is affected by the antenna mount
To avoid height and ZTD errors of centimeters, we must use at least a nominal model for the phase-center variations (PCVs) for each antenna type
2017/11/24 FundamentalsofGPSforgeodesy 14

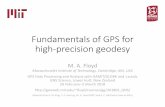
The signal from each GPS satellite is delayed by an amount dependent on the pressure and humidity and its elevation above the horizon. We invert the measurements to estimate the average delay at the zenith (green bar).
(Figure courtesy of COSMIC Program)
Atmosphericdelay
2017/11/24 FundamentalsofGPSforgeodesy 15

Plot courtesy of J. Braun, UCAR
Zenithdelayfromwetanddrycomponentsoftheatmosphere
• Colors are for different satellites
• Total delay is ~2.5 meters• Variability mostly caused by wet
component
• Wet delay is ~0.2 meters• Obtained by subtracting the
hydrostatic (dry) delay
• Hydrostatic delay is ~2.2 meters
• Little variability between satellites or over time
• Well calibrated by surface pressure
2017/11/24 FundamentalsofGPSforgeodesy 16

One-way (undifferenced) LC phase residuals projected onto the sky in 4-hr snapshots. Spatially repeatable noise is multipath; time-varying noise is water vapor.
Red is satellite track. Yellow and green positive and negative residuals purely for visual effect. Red bar is scale (10 mm).
Multipathandwatervaporeffectsintheobservations
2017/11/24 FundamentalsofGPSforgeodesy 17

LimitsofGNSSaccuracy
• Signalpropagationeffects• Signalscattering(antennaphasecenter/multipath)• Atmosphericdelay(mainlywatervapor)• Ionosphericeffects• Receivernoise
• Unmodeled motionsofthestation• Monumentinstability• Loadingofthecrustbyatmosphere,oceans,andsurfacewater
• Unmodeled motionsofthesatellites• Referenceframe
2017/11/24 FundamentalsofGPSforgeodesy 18

Monuments Anchored to Bedrock are Critical for Tectonic Studies (not so much for atmospheric studies)
Good anchoring:Pin in solid rockDrill-braced (left) in fractured rock Low building with deep foundation
Not-so-good anchoring:Vertical rodsBuildings with shallow foundation Towers or tall building (thermal effects)
2017/11/24 FundamentalsofGPSforgeodesy 19

FromDongetal.J.Geophys.Res.,107,2075,2002
Atmosphere (purple)2-5 mm
Water/snow (blue/green)2-10 mm
Nontidal ocean (red)
2-3 mm
Annual Component of Vertical Loading
2017/11/24 FundamentalsofGPSforgeodesy 20

LimitsofGNSSaccuracy
• Signalpropagationeffects• Signalscattering(antennaphasecenter/multipath)• Atmosphericdelay(mainlywatervapor)• Ionosphericeffects• Receivernoise
• Unmodeled motionsofthestation• Monumentinstability• Loadingofthecrustbyatmosphere,oceans,andsurfacewater
• Unmodeled motionsofthesatellites• Referenceframe
2017/11/24 FundamentalsofGPSforgeodesy 21

GPS Satellite
Limits to model are non-gravitational accelerations due to solar and Earth radiation, unbalanced thrusts, and outgassing; and non-spherical antenna pattern
Modeling of these effects has improved, but for global analyses remain a problem
2017/11/24 FundamentalsofGPSforgeodesy 22

Quality of IGS Final Orbits 1994-2017/0620 mm = 1 ppb Source:http://acc.igs.org
2017/11/24 FundamentalsofGPSforgeodesy 23
Analysiscentersnow<15mmRMSdifference2000/1/1Week1042

LimitsofGNSSaccuracy
• Signalpropagationeffects• Signalscattering(antennaphasecenter/multipath)• Atmosphericdelay(mainlywatervapor)• Ionosphericeffects• Receivernoise
• Unmodeled motionsofthestation• Monumentinstability• Loadingofthecrustbyatmosphere,oceans,andsurfacewater
• Unmodeled motionsofthesatellites• Referenceframe
2017/11/24 FundamentalsofGPSforgeodesy 24

Referenceframes
• BasicIssue:Howwellcanyourelateyourpositionestimatesovertimeto:1. Asetofstationswhosemotioniswellmodeled?2. A blockofcrustthatallowsyoutointerpretthe
motions?
• Implementation:HowtousetheavailabledataandthefeaturesofGLOBKtorealizetheframe(s)
• Bothquestionstobeaddressedindetailinlaterlectures
2017/11/24 FundamentalsofGPSforgeodesy 25

Effect of Orbital and Geocentric Position Error/Uncertainty
•
High-precision GPS is essentially relative !
Baseline error/uncertainty ~ Baseline distance x geocentric SV or position errorSV altitude
SV errors reduced by averaging:Baseline errors are ~ 0.2 • orbital error / 20,000 kme.g. 20 mm orbital error = 1 ppb or 1 mm on 1000 km baseline
Network (“absolute”) position errors less important for small networkse.g. 5 mm position error ~ 1 ppb or 1 mm on 1000 km baseline10 cm position error ~ 20 ppb or 1 mm on 50 km baseline
* But SV and position errors are magnified for short sessions
2017/11/24 FundamentalsofGPSforgeodesy 26

Summary
• GPSObservables:• GPSdataandthecombinationsofphaseandpseudo-rangeused
• Modelingtheobservations:Aspectsnotwellmodeled• Multipathandantennaphasecentermodels• Atmosphericdelaypropagation
• LimitsofGPSaccuracy• Monumenttypes• Loading(morelater)• Orbitquality:Since2000lessthan40mmcorrespondingto2ppb.HardtoimproveontheIGSorbits.
2017/11/24 FundamentalsofGPSforgeodesy 27