[email protected]@Generic 59BC1E48523A
9
Robert C. Leishman 1 e-mail: [email protected] Kenneth W. Chase e-mail: [email protected] Department of Mechanical Engineering, Brigham Young University, Provo, UT 84602 Direct Linearization Method Kinematic Variation Analysis Velocity and acceleration analysis is an important tool for predicting the motion of mechanisms. The results, however, may be inaccurate when applied to manufactured products due to the process variations that occur in production. Small changes in mecha- nism dimensions can accumulate and propagate, causing a significant variation in the performance of the mechanism. A new application of statistical analysis is presented for predicting the effects of variation on mechanism kinematic performance. The new method is an extension of the direct linearization method developed for static assemblies. This method provides a solution that is a closed form. It may be applied to two-dimensional mechanisms to predict variation in velocity and acceleration due to dimensional varia- tions. It is also shown how form, orientation, and position variations may be included in the analysis to analyze variations that occur within the joints. Only two assemblies are analyzed to characterize the distribution: The first determines the mean, and the second estimates the variance. The system is computationally efficient and well suited for design iteration. DOI: 10.1115/1.4001531 1 Introduction Variation analysis is typically used to verify that critical dimen- sions in an assembly are controlled by predicting the stack-up of contributing component variations and is routinely used in manu- facturing and assembly environments with great success. Geomet- ric variation can also cause variation in mechanisms, which are dynamic assemblies. This paper documents a tool that can be used to predict how variations in geometry can cause variations in the position, velocity, and acceleration of two-dimensional 2D mechanisms. Huo and Chase 1 demonstrated the similarity be- tween the velocity equation of a mechanism and its variation in position. They found that the Jacobian matrix of the velocity so- lution was equivalent to the sensitivity matrix of the position tol- erance. It will be shown below how this similarity can be ex- tended, so that the derivative of the Jacobian matrix may be used to describe variation in velocity and the second derivative of the Jacobian matrix may be used to describe variation in acceleration. Combined with statistical analysis, the variation in an entire popu- lation may be characterized without resorting to Monte Carlo simulations. Many researchers have looked at variation analysis in mecha- nisms. Several have focused on the effects of geometric variation on positional variation 2,3. This is especially true in the field of robotics 4,5. Some analyses also accounted for clearance in pin joints, but they did not examine higher order kinematic terms 6,7. In contrast, Lee and Gilmore 8 developed a comprehen- sive, closed form method that estimates position, velocity, and acceleration variations of open and closed loop mechanisms. They did not include geometric feature variations. They used an effec- tive link length model to account for variations due to pin joint clearances. In that model, the link length variations are not inde- pendent of the clearances. They were, however, able to extend their method to dynamic analysis 9. The new method for the variation analysis of mechanism kine- matics presented in this paper has been developed using the direct linearization method DLM. The DLM has been used extensively to model dimensional variation in assemblies and mechanisms 10–12. It produces a closed form solution in which all the tol- erance sensitivities are obtained by a simple matrix operation. As will be shown, the following procedure is an extension of the DLM to higher order kinematics. Utilizing the DLM provides a great deal of power for the ex- tension presented in this paper. The DLM described by Chase et al. 10 predicts the variation in static assembly dimensions given the means and variations of all the component dimensions. The DLM has been studied and utilized extensively 11. For example, the DLM was compared with Monte Carlo approximations and discovered that to achieve the accuracy of the DLM required a Monte Carlo simulation of 30,000 or more random assemblies 13. Multiple loop assemblies, with open and closed loops, have been evaluated many times with this method 3,13. It has been demonstrated that the DLM accurately analyzes three-dimensional assemblies 14. The DLM has been incorporated as a computer aided design CAD application 15 in the commercially avail- able software CETOL 6 by Sigmetrix. The DLM has also been modified to account for non-normal distributions by utilizing skewness and kurtosis 16. Another major advantage of using the DLM is that variation in kinematic joints can be modeled through the inclusion of geomet- ric feature variations form, orientation, and location12. This way, joint variations are independent of geometric variations. Similar extensions have been made in this study to predict the effects of feature variations on the velocity and acceleration varia- tions of mechanisms. Feature variations propagate through each joint type uniquely. Five types of joints are commonly used in 2D mechanisms: planar, cylinder slider, edge slider, pin, and parallel cylinders 10. This paper has been organized as follows. The subsequent sec- tion provides a brief overview of applying the DLM. An example is then used to illustrate the DLM and how it is extended to apply to mechanisms. Next, the method for applying feature variations to model variations in joints is presented; followed by an addi- tional example to depict the use of this method for mechanisms. Finally, the results and conclusions are summarized. It is important to note that because this method extends the DLM using the same principles, simple examples were deliber- ately chosen to demonstrate in detail how the extension is accom- plished. 2 Direct Linearization Method Applied to Mecha- nisms Positional variation analysis of an assembly is completed using the DLM referenced above. The method uses a Taylor series ex- 1 Corresponding author. Contributed by the Mechanisms and Robotics Committee of ASME for publica- tion in the JOURNAL OF MECHANICAL DESIGN. Manuscript received July 23, 2009; final manuscript received March 15, 2010; published online June 9, 2010. Assoc. Editor: Kwun-Lon Ting. Journal of Mechanical Design JULY 2010, Vol. 132 / 071003-1 Copyright © 2010 by ASME Downloaded From: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/2015 Terms of Use: http://asme.org/terms
description
Mechanical
Transcript of [email protected]@Generic 59BC1E48523A

1
scfrdtpmtplettJCls
norj�sadtcpt
mlt�
tmK
J
Downloaded Fr
Robert C. Leishman1
e-mail: [email protected]
Kenneth W. Chasee-mail: [email protected]
Department of Mechanical Engineering,Brigham Young University,
Provo, UT 84602
Direct Linearization MethodKinematic Variation AnalysisVelocity and acceleration analysis is an important tool for predicting the motion ofmechanisms. The results, however, may be inaccurate when applied to manufacturedproducts due to the process variations that occur in production. Small changes in mecha-nism dimensions can accumulate and propagate, causing a significant variation in theperformance of the mechanism. A new application of statistical analysis is presented forpredicting the effects of variation on mechanism kinematic performance. The new methodis an extension of the direct linearization method developed for static assemblies. Thismethod provides a solution that is a closed form. It may be applied to two-dimensionalmechanisms to predict variation in velocity and acceleration due to dimensional varia-tions. It is also shown how form, orientation, and position variations may be included inthe analysis to analyze variations that occur within the joints. Only two assemblies areanalyzed to characterize the distribution: The first determines the mean, and the secondestimates the variance. The system is computationally efficient and well suited for design
iteration. �DOI: 10.1115/1.4001531�Introduction
Variation analysis is typically used to verify that critical dimen-ions in an assembly are controlled by predicting the stack-up ofontributing component variations and is routinely used in manu-acturing and assembly environments with great success. Geomet-ic variation can also cause variation in mechanisms, which areynamic assemblies. This paper documents a tool that can be usedo predict how variations in geometry can cause variations in theosition, velocity, and acceleration of two-dimensional �2D�echanisms. Huo and Chase �1� demonstrated the similarity be-
ween the velocity equation of a mechanism and its variation inosition. They found that the Jacobian matrix of the velocity so-ution was equivalent to the sensitivity matrix of the position tol-rance. It will be shown below how this similarity can be ex-ended, so that the derivative of the Jacobian matrix may be usedo describe variation in velocity and the second derivative of theacobian matrix may be used to describe variation in acceleration.ombined with statistical analysis, the variation in an entire popu-
ation may be characterized without resorting to Monte Carloimulations.
Many researchers have looked at variation analysis in mecha-isms. Several have focused on the effects of geometric variationn positional variation �2,3�. This is especially true in the field ofobotics �4,5�. Some analyses also accounted for clearance in pinoints, but they did not examine higher order kinematic terms6,7�. In contrast, Lee and Gilmore �8� developed a comprehen-ive, closed form method that estimates position, velocity, andcceleration variations of open and closed loop mechanisms. Theyid not include geometric feature variations. They used an effec-ive link length model to account for variations due to pin jointlearances. In that model, the link length variations are not inde-endent of the clearances. They were, however, able to extendheir method to dynamic analysis �9�.
The new method for the variation analysis of mechanism kine-atics presented in this paper has been developed using the direct
inearization method �DLM�. The DLM has been used extensivelyo model dimensional variation in assemblies and mechanisms10–12�. It produces a closed form solution in which all the tol-
1Corresponding author.Contributed by the Mechanisms and Robotics Committee of ASME for publica-
ion in the JOURNAL OF MECHANICAL DESIGN. Manuscript received July 23, 2009; finalanuscript received March 15, 2010; published online June 9, 2010. Assoc. Editor:
wun-Lon Ting.ournal of Mechanical Design Copyright © 20
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
erance sensitivities are obtained by a simple matrix operation. Aswill be shown, the following procedure is an extension of theDLM to higher order kinematics.
Utilizing the DLM provides a great deal of power for the ex-tension presented in this paper. The DLM described by Chase etal. �10� predicts the variation in static assembly dimensions giventhe means and variations of all the component dimensions. TheDLM has been studied and utilized extensively �11�. For example,the DLM was compared with Monte Carlo approximations anddiscovered that to achieve the accuracy of the DLM required aMonte Carlo simulation of 30,000 or more random assemblies�13�. Multiple loop assemblies, with open and closed loops, havebeen evaluated many times with this method �3,13�. It has beendemonstrated that the DLM accurately analyzes three-dimensionalassemblies �14�. The DLM has been incorporated as a computeraided design �CAD� application �15� in the commercially avail-able software CETOL 6� by Sigmetrix. The DLM has also beenmodified to account for non-normal distributions by utilizingskewness and kurtosis �16�.
Another major advantage of using the DLM is that variation inkinematic joints can be modeled through the inclusion of geomet-ric feature variations �form, orientation, and location� �12�. Thisway, joint variations are independent of geometric variations.Similar extensions have been made in this study to predict theeffects of feature variations on the velocity and acceleration varia-tions of mechanisms. Feature variations propagate through eachjoint type uniquely. Five types of joints are commonly used in 2Dmechanisms: planar, cylinder slider, edge slider, pin, and parallelcylinders �10�.
This paper has been organized as follows. The subsequent sec-tion provides a brief overview of applying the DLM. An exampleis then used to illustrate the DLM and how it is extended to applyto mechanisms. Next, the method for applying feature variationsto model variations in joints is presented; followed by an addi-tional example to depict the use of this method for mechanisms.Finally, the results and conclusions are summarized.
It is important to note that because this method extends theDLM using the same principles, simple examples were deliber-ately chosen to demonstrate in detail how the extension is accom-plished.
2 Direct Linearization Method Applied to Mecha-nisms
Positional variation analysis of an assembly is completed using
the DLM referenced above. The method uses a Taylor series ex-JULY 2010, Vol. 132 / 071003-110 by ASME
5 Terms of Use: http://asme.org/terms

pmtdt
afi
DcimBnt
3
rpsmE�apooat�
0
Downloaded Fr
ansion and truncation to approximate the derivatives of the kine-atic loop equations—making the calculations linear. The steps
hat show the actual implementation of the Taylor series in eacherivation are assumed, and the first terms of the partial deriva-ives are retained. A summary of the DLM is as follows.
1. The critical performance parameters of the assembly areidentified. Equivalent kinematic mechanisms are introducedin the assembly by creating vector chains through the con-tributing dimensional and geometric features. For morecomplex assemblies, multiple loops of vectors may be re-quired.
2. Appropriate kinematic joints are inserted at the mating sur-faces of the parts within the assembly.
3. The kinematic loops and corresponding equations areformed.
4. Partial differentials are taken with respect to the independentand dependent variables in the equivalent mechanism �theindependent variables are those whose geometric variationsare known; the dependent variables are assembly variations,which will be found through the analysis�.
5. The dependent and independent partial derivatives aregrouped into corresponding matrices and solved for the de-pendent variables �critical assembly parameters� using linearalgebra.
6. Worst case and/or statistical expressions are calculated asestimates of the variation.
This process lends itself very nicely to the variation analysis ofctual mechanisms, as they already have the first three steps de-ned.There is an important point to understand when to apply the
LM to mechanisms. Both the kinematic and variation solutionshange with geometry. So, they both must be repeated at manynstantaneous positions over the range of the mechanism to deter-
ine the velocity, acceleration, and variations at each position.ecause this method is a closed form, little computation time iseeded to accomplish this. The following examples will illustratehe process.
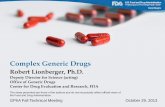
Example Problem: Four-Bar MechanismThis example analyzes a vector model of a four-bar crank and
ocker mechanism �Fig. 1�. As the input crank, r2, rotates a com-lete revolution, the output rocker oscillates. The designer setspecified limits for �4, �4, and �4 based on application require-ents. The analysis is described by a single closed vector loop.ach vector represents a link with a specified length and variation.1 can arbitrarily be aligned with the X axis, so its variation canlways be eliminated. �2, �2, and �2 are specified inputs, withrobable errors on each. The nominal values of �3, �3, and �3 andf �4, �4, and �4 are found using a numerical solver �CAD tool�r by calculation. The variations in �3, �3, and �3 and in �4, �4,nd �4 are the unknowns sought by this method. It is assumed thathe variations are small compared with the nominal dimensions
Fig. 1 Four-bar crank and rocker mechanism
Table 1�.
71003-2 / Vol. 132, JULY 2010
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
3.1 Position Variation Analysis. The DLM is readily appliedto mechanisms. The first few steps are to establish the criticalassembly parameters, the joints, and the loop equations. The criti-cal parameters are identified above in the example introduction.The joints are the four pin joints of the mechanism. The positionequation for the mechanism is described by
0 = r1ei�1 + r2ei�2 + r3ei�3 − r4ei�4 �1�A Taylor series expansion is performed on Eq. �1�, retaining
only the first order terms �Eq. �2��. The dr and d� terms are thevariations. This step is analogous to taking the time derivative inEq. �1�, in which case the dr and d� terms would become veloci-ties. H is the resultant of the vector sum, which, for closed loops,is zero
H = dr1ei�1 + dr2ei�2 + r2d�2iei�2 + dr3ei�3 + r3d�3iei�3 − dr4ei�4
− r4d�4iei�4 �2�
Euler’s identity is used to resolve the vectors into the x and ycomponents, which are placed in the Hx and Hy equations, respec-tively
ei� = cos��� + i sin��� �3�In step 5 of the DLM, all the partial derivative terms are evalu-
ated at the nominal position of the variables and grouped intomatrices �the authors used the closed form equations provided byHowell �17� to determine the nominal angles �3 and �4 throughoutthe range of the mechanism�. The known variations are grouped inthe vector ��X� and the unknown assembly variations in ��U�. Ingeneral, ��X� and ��U� could include length and angle variations.The partial derivatives with respect to the independent terms areplaced into the �A� matrix, and those with respect to the dependentterms are placed into the �B� matrix. The �B� matrix should besquare. The matrix equation for the closed loops is
�A���X� + �B���U� = 0 �4�
The �A� and �B� matrices and ��X� and ��U� vectors are com-posed as follows �the last two columns in the �A� matrix are zerosand are placeholders, so the results can be substituted in the ve-locity and acceleration matrix analyses�
�A� = ��Hx
�r1
�Hx
�r2
�Hx
�r3
�Hx
�r4
�Hx
��2
�Hx
��2
�Hx
��2
�Hy
�r1
�Hy
�r2
�Hy
�r3
�Hy
�r4
�Hy
��2
�Hy
��2
�Hy
��2
� �5�
�B� = ��Hx
��3
�Hx
��4
�Hy
��3
�Hy
��4
� �6�
��X� = �dr1 dr2 dr3 dr4 d�2 d�2 d�2�T �7�
T
Table 1 Parameters for example problem 1
Variable Value Variation
r1 5 cm 0.02 cmr2 2 cm 0.01 cmr3 5 cm 0.02 cmr4 4.5 cm 0.015 cm�2 0–2� rad 0.0017 rad�2 1 rad/s 0.0017 rad/s�2 0 rad /s2 0.0017 rad /s2
��U� = �d�3 d�4� �8�
Transactions of the ASME
5 Terms of Use: http://asme.org/terms

ra
l
metes
mat
wtta
mtoe“fi
vtnf
an
J
Downloaded Fr
In general, there is a third equation composed of the sum of theelative angles. However, in this case the sum vanishes identicallys there are only two unknowns.
Equation �4� is solved for the dependent variation ��U� byinear algebra to yield
��U� = �− �B�−1�A����X� = �Sp���X� �9�
The resulting −�B�−1�A� matrix is called the position sensitivityatrix �SP�. In tolerance analysis, this is typically called the “tol-
rance sensitivity” matrix. The benefit of this method is that allhe tolerance sensitivities are obtained with a simple matrix op-ration, which may be performed on a desktop computer or acientific hand calculator.
Once the nominal values for all the angles are determined, theatrices may be evaluated using Eq. �9� at each increment in
ngle. Worst case or statistical methods may be used to estimatehe variation of the dependent variables, as shown below.
Worst case:
�Ui = j=1
m
Sij�Xj �10�
Statistical model:
�Ui =��j=1
m
Sij�Xj 2
�11�
here i=1, . . . ,n �number of dependent variables�, ��X� j is theolerance of the jth �from 1 to m� independent variable, and �S� ishe sensitivity matrix of the mechanism �for position, velocity, orcceleration�.
When parts are in production, the ��X� j values are obtained byeasuring each dimension and calculating the standard devia-
ions, �. In the design stage, however, assembly variations areften estimated by substituting the dimensional tolerances forach ��X� j. Hence, designers commonly refer to this process astolerance analysis.” When using the statistical model, the speci-ed tolerances and each resulting ��U�i represent �3� variations.Figures 2 and 3 show the nominal values and the standard de-
iations of the positions of �3 and �4 versus �2. Clearly, the varia-ions in �3 and �4 are not constant over the range of the mecha-ism. The range of position variation is informative and valuableor a designer.
3.2 Velocity Variation Analysis. The velocity variationnalysis begins with the velocity vector equation of the mecha-ism:
i�2 i�3 i�4
Fig. 2 Nominal values of �3 and �4 versus �2
0 = r2�2ie + r3�3ie − r4�4ie �12�
ournal of Mechanical Design
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
The Taylor series expansion is performed on Eq. �12� with re-spect to each variable. This step is analogous to taking the timederivative of Eq. �12�, where the dr and d� terms would becomevelocities and the d� terms would become the angular accelera-tions. Each term of Eq. �12� above results in three terms of theform shown below for a total of nine terms:
V = dr2�2iei�2 + r2d�2iei�2 − r2�2d�2ei�2 + ¯ �13�At this point, the procedure is similar to the position analysis.
The vector equation is separated into an X equation and a Y equa-tion using Eq. �3�. The independent derivatives are grouped intothe �C� matrix, the dependent variables for position are groupedinto the �D� matrix, and the dependent variables for velocity aregrouped into the �E� matrix. The �D� and �E� matrices should besquare
�C���X� + �D���U� + �E���V� = 0 �14�The following four equations are the matrix expressions that
show the elements of the �C�, �D�, and �E� matrices and the �Vvector �the last column in the �C� matrix is composed of zeros toinsert the results in the acceleration analysis�
�C� = ��Vx
�r1
�Vx
�r2
�Vx
�r3
�Vx
�r4
�Vx
��2
�Vx
��2
�Vx
��2
�Vy
�r1
�Vy
�r2
�Vy
�r3
�Vy
�r4
�Vy
��2
�Vy
��2
�Vy
��2
� �15�
�D� = ��Vx
��3
�Vx
��4
�Vy
��3
�Vy
��4
� �16�
�E� = ��Vx
��3
�Vx
��4
�Vy
��3
�Vy
��4
� �17�
��V� = �d�3 d�4�T �18�
Closed loop Eq. �14� is solved for ��V� in
��V� = �− �E�−1�C����X� − ��E�−1�D����U� �19�However, in place of the position results being inserted directly,
the sensitivity matrix from Eq. �9� is inserted, as shown in Eq.�20�. This step permits interactions between the �C�, �D�, and �E�
Fig. 3 Variations in �3 and �4 versus �2
matrices before evaluating the velocity sensitivities
JULY 2010, Vol. 132 / 071003-3
5 Terms of Use: http://asme.org/terms

t��m
oa“v
e
TteEEec
Evvt�a
v
0
Downloaded Fr
��V� = �− �E�−1�C� + �E�−1�D��B�−1�A����X� = �Sv���X��20�
Solutions are calculated by either the worst case �Eq. �10�� orhe statistical methods �Eq. �11��. The velocity sensitivity matrixSV� results from the operations in Eq. �20�. For this example,
2=1 rad /s and �2=0 rad /s2 through the whole range of theechanism.Figures 4 and 5 show the nominal �mean� and variations ��3��
f the angular velocities of �3 and �4 versus the input �2, movingt a constant angular velocity. It is interesting to note that the twodead points,” where �4 equals zero, do not coincide with the zeroelocities for �3.
3.3 Acceleration Variation Analysis. The vector accelerationquation for the four-bar linkage is shown below:
0 = r2�2iei�2 − r2�22ei�2 + r3�3iei�3 − r3�3
2ei�3 − r4�4iei�4 + r4�42ei�4
�21�
he Taylor series expansion is performed on Eq. �21� with respecto all the variables, and the first order terms are kept �only thexpansion of the first two terms of Eq. �21� is shown below�.quation �22� is analogous to computing the time derivative ofq. �21�, in which case each dr and d� would become a velocity,ach d� would become an acceleration, and each d� would be-ome a jerk
W = dr2�2iei�2 + r2d�2iei�2 − r2�2d�2ei�2 − dr2�22ei�2
− 2r2�2d�2ei�2 − r2�22d�2iei�2 + ¯ �22�
Equation �3� is used to extract the X and Y components fromq. �22�. The terms are then grouped into matrices: Independentariables are grouped into the �G� matrix, the position dependentariables into the �H� matrix, the velocity dependent variables intohe �I� matrix, and the acceleration dependent variables into theJ� matrix. Equation �23� is the matrix equation that describes thecceleration variation, ��W�
�G���X� + �H���U� + �I���V� + �J���W� = 0 �23�
The forms for the �G�, �H�, �I�, and �J� matrices and the �Wector are as follows:
�G� = ��Wx
�r1
�Wx
�r2
�Wx
�r3
�Wx
�r4
�Wx
��2
�Wx
��2
�Wx
��2
�Wy �Wy �Wy �Wy �Wy �Wy �Wy � �24�
Fig. 4 Nominal values of �3 and �4 versus �2
�r1 �r2 �r3 �r4 ��2 ��2 ��2
71003-4 / Vol. 132, JULY 2010
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
�H� = ��Wx
��3
�Wx
��4
�Wy
��3
�Wy
��4
� �25�
�I� = ��Wx
��3
�Wx
��4
�Wy
��3
�Wy
��4
� �26�
�J� = ��Wx
��3
�Wx
��4
�Wy
��3
�Wy
��4
� �27�
��W� = �d�3 d�4�T �28�
Equation �23� may be solved for ��W�:
��W� = − �J�−1�G���X� − �J�−1�H���U� − �J�−1�I���V� �29�Equation �30� shows the terms from the previous analyses �Eqs.
�9� and �20�� substituted into Eq. �29�:
��W� = �− �J�−1�G� + �J�−1�H��B�−1�A� + �J�−1�I��E�−1�C�
− �J�−1�I��E�−1�D��B�−1�A����X�
= �Sa���X� �30�
Equation �30� results in the acceleration sensitivity matrix, �SA�. Itis combined with the equation for the worst case �Eq. �10�� or thestatistical methods �Eq. �11�� to estimate the variations in accel-eration, evaluated at increments along the mechanism’s range.
Figures 6 and 7 show the nominal �mean� and the variations��3�� in the angular accelerations of �3 and �4 versus �2. Thechart of the nominal accelerations shows that the peak accelera-tions occur at the dead points of the velocity, as expected. Themagnitudes of the peaks are important in determining maximumdynamic bearing loads and unbalanced forces. The variation chartshows that the greatest variations in acceleration occur at thepoints of maximum nominal acceleration, which could affect thepeak dynamic forces.
3.4 Summary of Results. This first example has illustratedthat small changes in dimension do contribute to variation in thehigher order kinematic terms of a mechanism. The variations arenot constant along the mechanism range—even when the mecha-
Fig. 5 Variations in �3 and �4 versus �2
nism is being driven by a constant velocity. When a mechanism is
Transactions of the ASME
5 Terms of Use: http://asme.org/terms

rtt
ccmufpo�
mtm
asaTst=v
e2
4
minmcvttdg
J
Downloaded Fr
equired to have precise kinematic performance, the variations inhe physical dimensions need to be taken into account to verifyhat the mechanism will be able to perform as required.
A thorough investigation would include calculations of the per-ent contribution �Eq. �31�� of each dimensional variable at theritical points along the range of the mechanism. % Cj is com-only used in tolerance analysis to identify the variation contrib-
ted by each dimension/feature. Sij is the sensitivity matrix �eitheror position, velocity, or acceleration�, �Xj is the variation in thearameter that is being examined, and the denominator is the sumf the ith sensitivity matrix row multiplied by the variation vector�X� squared
% Cj =�Sij�Xj�2
�j=1
m
Sij��X� j 2 �31�
This is important for determining which dimensions have theost effect on the variation. By controlling those values that have
he greatest influence, the variation in the mechanism may beinimized effectively.A chart of the percent contributions for position, velocity, and
cceleration variations is shown in Fig. 8. For this chart, the po-ition, velocity, and acceleration percent contributions are evalu-ted at different �2 positions but are displayed on the same chart.he maximum contributions occur at different positions for eachtate. �2=4.188 rad �240 deg� for the position state percent con-ribution, �2=3.107 �178 deg� for the velocity state, and �20.384 �22 deg� for the acceleration state. The values for theariations at those points are �4= �0.005 rad, �4=
�0.0024 rad /s, and �4= �0.012 rad /s2, as shown in the leg-nd. The dimensional variation in the linkages, especially in links, 3, and 4, has a great effect on the output crank variation.
Geometric Feature VariationsA valuable extension to the DLM comes from including geo-etric feature variations. Geometric feature variations character-
ze variations that occur when parts are in contact. With mecha-isms, parts contact at the joints. Geometric feature variationsay be inserted at each joint in the mechanism to model the
ontact variations. Principally in the mechanism analysis, featureariations may be used to model clearance in pin joints. However,here are other sources of variation introduced in other joint typeshat can also be taken into account. Reference �12� discusses theistinct types of variations that occur in common 2D joints due to
Fig. 6 Nominal values of �3 and �4 versus �2
eometric feature variations. In summary, Fig. 9 shows which
ournal of Mechanical Design
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
types of variation �rotational—R or translational—T� can occur ineach 2D joint type due to each feature variation. Symbols for eachfeature appear at the top of the columns.
5 Example 2: Crank-Slider MechanismThis example uses a vector model of a crank-slider mechanism
�Fig. 10�. A crank-slider mechanism is a common device used inmany machines, from auto engines to electric razors. The rotatingcrank, r2, drives the connecting rod, r3, which makes the slider, orpiston, oscillate along r4. The piston axis is offset a distance r1from the drive shaft. Significant variations in position, velocity,and acceleration of the piston may occur as a result of dimen-sional and geometric feature variations. Specified limits on the
Fig. 7 Variations in �3 and �4 versus �2
Fig. 8 Percent contributions at certain points for position, ve-locity, and acceleration
Fig. 9 Variations resulting from each feature exhibited in each
2D joint type †12‡JULY 2010, Vol. 132 / 071003-5
5 Terms of Use: http://asme.org/terms

ssi
vcwntavfa
bTdfcpvotstfbt�l
t
V
rrr�������
0
Downloaded Fr
troke, peak velocity, and peak acceleration would be set by thelider clearance at the top dead center, bearing forces, and balanc-ng requirements.
The model is completed using one closed vector loop. Eachector represents a link with a specified length and variation. �4an arbitrarily be aligned with the X axis and r1 can be alignedith the Y axis, so variation in �1 and �4 can always be elimi-ated. �2, �2, and �2 are specified inputs with probable errors inhose inputs. The nominal values of �3, �3, and �3 and of r4, v4,nd a4 are found using a numerical solver or by calculation. Theariations in �3, �3, and �3 and in r4, v4, and a4 are the unknownsound using this method. Again, it is assumed that the variationsre small compared with the nominal dimensions.
Also in this example, four geometric feature variations haveeen included, indicated by the feature control blocks in Fig. 10.he first three are true position tolerances that account for a ran-om pin location due to clearance in the three pin joints. Theourth is a straightness feature on the surface where the sliderontacts. Figure 9 shows that for a revolute �pin� joint, a trueosition feature adds a translational variation, so two variationectors are inserted at each joint—one in the horizontal and thether in the vertical direction. The � values reported in Table 2 arehe diameters of the tolerance zones. According to ANSI Y 14.5tandards, true position tolerances represent the diameter of theolerance zone; thus, �� /2 is the maximum variation allowedrom the nominal. For the planar joint with a straightness feature,oth translational and rotational variations are added. The rota-ional variation, , is approximated following Eq. �13� in Ref.12� and is reproduced in Eq. �32� for reference. The characteristicength is the length of the piston, 4.0 cm in this example.
� = arctan� ��
2
characteristic length� �32�
5.1 Position Variation Analysis. The first step is to determinehe position equation, including the geometric feature variation
Fig. 10 Crank-slider mechanism
Table 2 Parameters for example problem 2
ariable Value Variation
1 2 cm 0.01 cm
2 5 cm 0.03 cm
3 9 cm 0.04 cm
1 0 0.0025 cm
2 0 0.005 cm
3 0 0.005 cm
4 0 0.005 cm
4 0 0.0025 cm
2 0–2� rad 0.0017 rad
2 1 rad/s 0.0017 rad/s
2 0 rad 0.0017 rad /s2
71003-6 / Vol. 132, JULY 2010
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
terms. The geometric variation terms are inserted as vectors in thex and y directions. Equation �33� shows the closed loop positionequation. Note that the nominal values of the position tolerancezones are zero, so the nominal equation is actually unchanged
H = r1ei�1 + �1ei0 + �1ei��/2� + r2ei�2 + �2ei0 + �2ei��/2� + r3ei�3
+ �3ei0 + �3ei��/2� − r4ei��4+4� + �4ei��/2� �33�A Taylor series expansion is performed on Eq. �33� with respect
to each of the variables. Only the first terms are kept for theanalysis. Again, this step is comparable to computing the timederivative of Eq. �33�, where each of the delta terms would be-come velocities
H = dr1ei�1 + d�1ei0 + d�1ei��/2� + dr2ei�2 + r2d�2iei�2 + d�2ei0
+ d�2ei��/2� + dr3ei�3 + r3d�3iei�3 + d�3ei0 + d�3ei��/2�
+ d�4ei��/2� − dr4ei��4+4� − r4d4iei��4+4� �34�
Equation �34� is divided into Hx and Hy equations using Eq. �3�and is inserted into the �A� and �B� matrices as before, with thevariation vectors being ��X� and ��U�. The �A� and �B� matricesin Eqs. �5� and �6� are very similar to those for this example; theonly difference is that dr4 becomes dependent and �4 is a constant.This is shown in the vectors ��X� and ��U� below
��X� = �dr1 dr2 dr3 d�2 d�2 d�2�T �35�
��U� = �d�3 dr4�T �36�
A new matrix �F� is added, into which the partial derivativeswith respect to the geometric feature variations are placed. Thevariations in the geometric features are placed in a ���� vector
�F� = ��Hx
��1
�Hx
��2
�Hx
��3
�Hx
��4
�Hx
�4
�Hy
��1
�Hy
��2
�Hy
��3
�Hy
��4
�Hy
�4
� �37�
���� = �d�1 d�2 d�3 d�4 d4�T �38�The method for obtaining the sensitivity equations is modified
for this case because of the additional matrix and variation vector.The closed loop matrix equation becomes
�A���X� + �B���U� + �F����� = 0 �39�
Equation �39� is solved for ��U� by Eq. �40� below
��U� = �− �B�−1�A����X� + �− �B�−1�F������
= �Sp���X� + �SFp����� �40�Just as in the first example, the nominal values of the angles
and lengths are determined as �2 is incremented over the range ofthe mechanism. The set of nominal values for each position isused to evaluate the sensitivities in the �A�, �B�, and �F� matrices.Expression for worst case or statistical variation stack-up maythen be used to find the variation in position. The worst case andstatistical formulas are also changed to include both sensitivitymatrices Sij and Sik.
Worst case:
�Ui = j=1
m
Sij�Xj + k=1
p
Sik��k �41�
Statistical model:
�Ui =��j=1
m
Sij�Xj 2
+ �k=1
p
Sik��k 2
�42�
where i=1, . . . ,n �number of dependent variables�, �Xj is thetolerance/variance of the jth independent variable, Sij are the ele-
−1
ments of the sensitivity matrix −�B� �A� of the mechanism, andTransactions of the ASME
5 Terms of Use: http://asme.org/terms

S=o
iab
atatevia
tau
J
Downloaded Fr
ik are the elements of the sensitivity matrix −�B�−1�F� for the k1, . . . , p geometric feature variations, ��k, for each single valuef �2.
Figures 11 and 12 show nominal �mean� and variations ��3��n the positions of �3 and r4 versus �2. The largest variations occurt the largest angle and position. The variation plot is more variedecause of the interaction between the two types of variation.
5.2 Velocity Variation Analysis. The velocity variationnalysis, including geometric feature variation, is very similar tohe analysis without geometric feature variations. The �C�, �D�,nd �E� matrices are composed in the same way as they were forhe previous example �Eqs. �14� and �19��. The difference is thequation used to solve for the dependent variation. Geometricariations do not appear in the velocity equation, but they arentroduced by inserting the matrices for ��U� from the positionnalysis �Eq. �40�� shown in
��U� = �− �E�−1�C� + �E�−1�D��B�−1�A����X�
− ��E�−1�D��B�−1�F������
= �Sv���X� + �SFv����� �43�Here, it can be seen that feature variations do affect the varia-
ion in the velocity of the mechanism. The two sensitivity matricesre evaluated throughout the mechanism range and can be solvedsing Eq. �41� and �42� for the dependent velocity variation.
Figures 13 and 14 show the nominal �mean� and variations
Fig. 11 Nominal values of �3 and r4 versus �2
Fig. 12 Variations in �3 and r4 versus �2
ournal of Mechanical Design
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
��3�� in the velocities of �3 and v4 versus �2. The peak varia-tions do occur at the peak values of velocity.
5.3 Acceleration Variation Analysis. Similar to velocity, thechanges for the acceleration variation analysis are the sensitivityequations that are formed when the position and velocity variationequations are substituted into Eq. �29� above; the result is
��W� = �− �J�−1�G� + �J�−1�H��B�−1�A� + �J�−1�I��E�−1�C�
− �J�−1�I��E�−1�D��B�−1�A����X� + ��J�−1�H��B�−1�F�
− �J�−1�I��E�−1�D��B�−1�F������
= �Sa���X� + �SFa����� �44�This equation is solved above using Eq. �41� and �42� over therange of the mechanism.
Figures 15 and 16 show the nominal �mean� and variations��3�� in the accelerations of �3 and a4 versus �2. The peakvalues of variation occur at the maximum accelerations. The val-ues vary because of the interaction between the two types ofvariation.
6 Summary of ResultsAs in the other example, the percent contribution charts are
useful in determining the major sources of variation. For thisexample, there are only two contributions shown; those fromthe dimensional and input variations and those from the geometricfeature variations. Figure 17 shows the contributions for posi-tion, velocity, and acceleration all at the peak stroke ��2
Fig. 13 Nominal values of �3 and v4 versus �2
Fig. 14 Variations in �3 and v4 versus �2
JULY 2010, Vol. 132 / 071003-7
5 Terms of Use: http://asme.org/terms

=rfirvtv
Ff
0
Downloaded Fr
6.143 �352 deg��. The percentage values will change over theange of the mechanism. While observing the percent contributiongure, it is important to remember that the magnitudes of geomet-ic feature variations were much smaller than the dimensionalariations. Nevertheless, as shown in Fig. 17, the geometric fea-ure variations can still contribute a significant amount of the totalariation. This is true for position, velocity, and acceleration. For
Fig. 16 Variations in �3 and a4 versus �2
Fig. 15 Nominal values of �3 and a4 versus �2
ig. 17 Percent contributions of dimensional and geometric
eature variation at �2=6.144 rad71003-8 / Vol. 132, JULY 2010
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
an accurate estimation of the variation in the system, geometricfeature variations must be included in the analysis.
7 ConclusionA new extension to a proven method for a variation analysis of
assemblies has been developed for predicting the kinematic per-formance of 2D mechanisms. Since it builds upon the DLM usingthe same methods, it is comprehensive. It may be applied to openand/or closed loop mechanisms, utilizing joints common to kine-matic analysis. Although open loops were not exhibited in thispaper, they may be incorporated using inverse kinematics and theequations established in Ref. �10�. The method predicts the effectsof dimensional and feature variations on critical velocity and ac-celeration requirements over the full range of motion of themechanism. Just as the DLM has been applied to multiple loopand 3D assemblies, this method is extendable to 3D mechanismsand higher time derivative motions.
It is efficient. The closed form statistical solution eliminates theneed to simulate large numbers of assemblies with random errors,to analyze them one-by-one, and to repeat the simulation at eachposition of the mechanism. An entire population of assembliesmay be characterized with only two solutions at each position ofthe mechanism: one for the mean dimensions and one for thevariation about the mean.
This is a powerful new tool for mechanism designers. It issuitable for design iteration for optimized performance and forestimating the probability of design realization.
Nomenclature�� vector of geometric feature variations�U vector of dependent positional variations�V vector of dependent velocity variations�W vector of dependent acceleration variations�X vector of independent positional variations
A matrix of position independent partialderivatives
B matrix of position dependent partial derivativesC matrix of velocity independent partial
derivativesD matrix of velocity dependent partial derivativesE matrix of velocity dependent partial derivativesF matrix of geometric feature partial derivativesG matrix of acceleration independent partial
derivativesH matrix of acceleration dependent partial
derivativesI matrix of acceleration dependent partial
derivativesJ matrix of acceleration dependent partial
derivativesS sensitivity matrix for position, velocity, or
accelerationSF sensitivity matrix with geometric feature varia-
tions for position, velocity, or acceleration
References�1� Huo, H., and Chase, K., 1996, “Variation Polygon—A New Method for De-
termining Tolerance Sensitivity in Assemblies,” Proceedings of the CSMEForum, CSME, Ontario, Canada, pp. 465–473.
�2� Choi, J., Lee, S., and Choi, D., 1998, “Stochastic Linkage Modeling for Me-chanical Error Analysis of Planar Mechanisms,” Mechanics Based Design ofStructures and Machines, 26�3�, pp. 257–276.
�3� Wittwer, J., Chase, K., and Howell, L., 2004, “The Direct LinearizationMethod Applied to Position Error in Kinematic Linkages,” Mech. Mach.Theory, 39�7�, pp. 681–693.
�4� Choi, D. H., Lee, S. J., Wickert, J. A., and Yoo, H. H., 2007, “ToleranceAnalysis of a Robot Manipulator Having Uncertainties in Joint Clearance andAxis Orientation,” ASME International Conference on Multibody Systems,Nonlinear Dynamics, and Control, Las Vegas, NV, Sept. 4–7, IDETC 2007-34316.
�5� Zhu, J., and Ting, K., 2000, “Uncertainty Analysis of Planar and Spatial Ro-
Transactions of the ASME
5 Terms of Use: http://asme.org/terms

J
Downloaded Fr
bots With Joint Clearances,” Mech. Mach. Theory, 35�9�, pp. 1239–1256.�6� Ting, K., Zhu, J., and Watkins, D., 2000, “The Effects of Joint Clearance on
Position and Orientation Deviation of Linkages and Manipulators,” Mech.Mach. Theory, 35�3�, pp. 391–401.
�7� Wu, W., and Rao, S., 2004, “Interval Approach for the Modeling of Tolerancesand Clearances in Mechanism Analysis,” ASME J. Mech. Des., 126�4�, pp.581–592.
�8� Lee, S., and Gilmore, B., 1991, “The Determination of the Probabilistic Prop-erties of Velocities and Accelerations in Kinematic Chains With Uncertainty,”ASME J. Mech. Des., 113, pp. 84–90.
�9� Lee, S., Gilmore, B., and Ogot, M., 1993, “Dimensional Tolerance Allocationof Stochastic Dynamic Mechanical Systems Through Performance and Sensi-tivity Analysis,” ASME J. Mech. Des., 115, pp. 392–402.
�10� Chase, K., Gao, J., and Magleby, S., 1995, “General 2-D Tolerance Analysis ofMechanical Assemblies With Small Kinematic Adjustments,” J. Des. Manuf.,5, pp. 263–274.
�11� 1997, “Tolerance Analysis of 2-D and 3-D Mechanical Assemblies With Small
Kinematic Adjustments, Advanced Tolerancing Techniques, 1st ed., H. Zhang,ournal of Mechanical Design
om: http://mechanicaldesign.asmedigitalcollection.asme.org/ on 07/20/201
ed., Wiley, New York, pp. 103–138.�12� Chase, K., Gao, J., Magleby, S., and Sorensen, C., 1996, “Including Geometric
Feature Variations in Tolerance Analysis of Mechanical Assemblies,” IIETrans., 28, pp. 795–807.
�13� Gao, J., Chase, K., and Magleby, S., 1995, “Comparison of Assembly Toler-ance Analysis by the Direct Linearization and Modified Monte Carlo Simula-tion Methods,” Proceedings of the ASME Design Engineering Technical Con-ferences, ASME, Boston, MA, pp. 353–360.
�14� Gao, J., Chase, K., and Magleby, S., 1998, “General 3-D Tolerance Analysis ofMechanical Assemblies With Small Kinematic Adjustments,” IIE Trans.,30�4�, pp. 367–377.
�15� Glancey, C., Chase, K., and Magleby, S., 1997, “A Comprehensive System forComputer-Aided Tolerance Analysis of 2-D and 3-D Mechanical Assemblies,”Proceedings of the Fifth International Seminar on Computer-Aided Toleranc-ing, Toronto, Canada, pp. 353–360.
�16� Glancey, C., 1994, “A Second-Order Method for Assembly Tolerance Analy-sis,” MS thesis, Brigham Young University, Provo, UT.
�17� Howell, L., 2001, Compliant Mechanisms, Wiley, New York.
JULY 2010, Vol. 132 / 071003-9
5 Terms of Use: http://asme.org/terms