1 Ultrasonic Elasticity Imaging. 2 Elasticity Imaging Image contrast is based on tissue elasticity...
25
1 Ultrasonic Elasticity Imaging
-
Upload
madeleine-crawford -
Category
Documents
-
view
246 -
download
5
Transcript of 1 Ultrasonic Elasticity Imaging. 2 Elasticity Imaging Image contrast is based on tissue elasticity...

1
Ultrasonic Elasticity Imaging

2
Elasticity Imaging
• Image contrast is based on tissue elasticity (typically Young’s modulus or shear modulus).
3
Clinical Values
• Remote palpation.
• Quantitative measurement of tissue elastic properties.
• Differentiation of pathological processes.
• Sensitive monitoring of pathological states.
4
Clinical Examples
• Tumor detection by palpation: breast, liver and prostate (limited).
• Characterization of elastic vessels.
• Monitoring fetal lung development.
• Measurements of intraocular pressure.
5
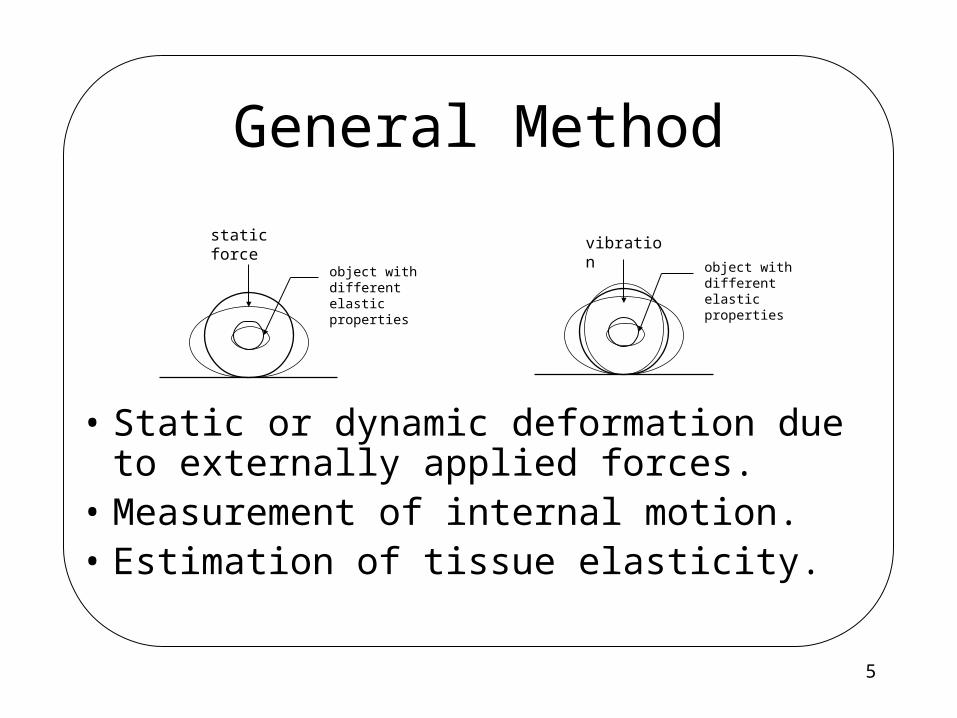
General Method
• Static or dynamic deformation due to externally applied forces.
• Measurement of internal motion.• Estimation of tissue elasticity.
static force
object with different elastic properties
vibration
object with different elastic properties

6
Static Approaches
• Equation of equilibrium:
3
1
3,2,1 ,0j
ij
ij ifx
where ij is the second order stress tensor, f i is the body force per unit volume in the xi direction.
static force
object with different elastic properties
7
Dynamic Approaches
• Wave equation with harmonic excitation:
2
2
2
2
2
c
t
U
x
U
• Doppler spectrum of a vibrating target:
)cos(
)cos()(
0 t
tAts
Lmx
x

8
Nomenclature
• Elastography: general field of elasticity imaging.
• Sonoelastography: the use of ultrasound for imaging of tissue elastic parameters.
• The above terms can be combined with strain, stress, velocity, amplitude, phase, vibration,…etc.

9
Direct Measurement
PC
RS-232object
balance
step-motor
•Hooke’s law: stress=elastic modulus*strain (=C.
•Strain is displacement/original length.

10
Typical Results
11
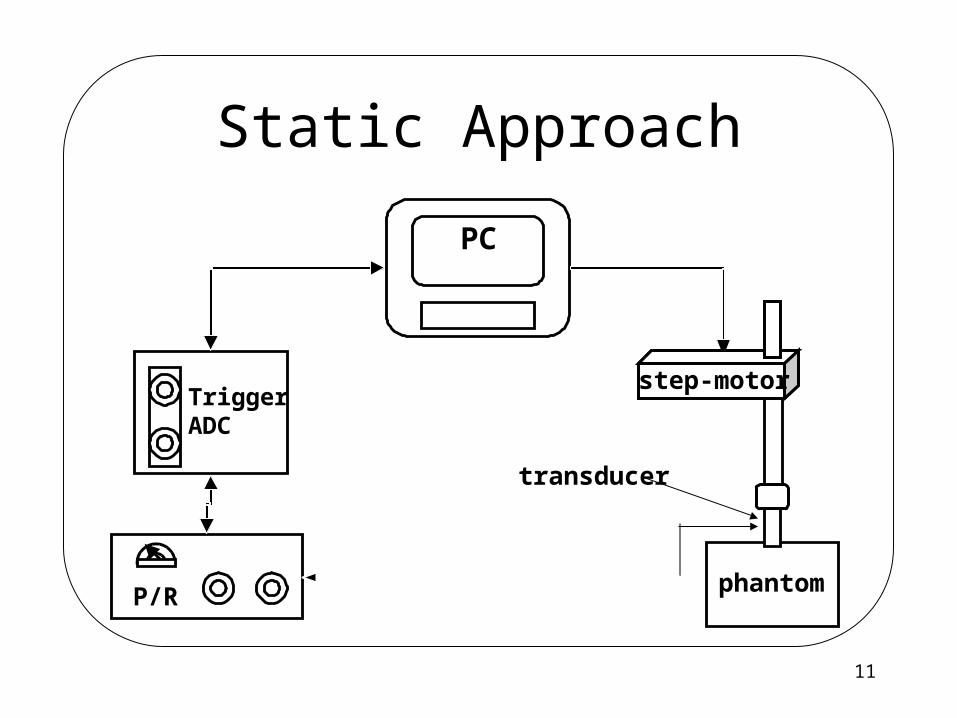
Static Approach
PC
TriggerADC
P/R phantom
step-motor
transducer

12
Compression Strain Sonoelastography
• Static deformation.• Displacement is estimated by cross-
correlating the signals pre- and post-compression.
• Strain is the spatial derivative of displacement.
• Assume uniform or simple stress distribution.

13
Strain Estimation
2
12
1
1
x
uu
x
uStrain
u1 u2
x2 x1
O Pressure

14
Baseband Displacement Estimation
Cross correlation based baseband speckle tracking
B1(t) = A(t- 1)exp(-j 1)
B2(t) = A(t- 2)exp(-j 2)
C(t) = - B1(t+) B2*()d
1 - 2 = C(0)
u = V (1-2) 2
= u x

15
Complications
• Stress distribution may be complicated.
• Speckle decorrelation due to scatterer re-distribution:– Decorrelation reduces the accuracy of displace
ment estimation.– Temporal stretching may be applied.

16
Temporal Stretching
• Pre-compressed signal r1(t)=s(t)*p(t)+n1(t), where – s1(t) is the scattering distribution function.– p(t) is the system’s impulse response.– n1(t) is measurement noise.
• Post-compressed signal r2(t)=s(t/a-t0)*p(t)+n2(t).• After stretching r3(t)= r2(at) =s(t-t0)*p(at)+n2(at).• The scaling factor a=1-.

17
Temporal Stretching
• Accuracy of the correlation based time delay estimation can be improved, particularly at large strain.
• Such a model ignores scatterer motion in lateral and elevational directions.
• Correlation coefficient may be used to directly estimate strain.

18
Multiple step compression strain sonoelastography
• A static approach.• Multiple steps of small strains are accumulated for
lower speckle decorrelation.• Neighboring vertical pixels, instead of pixels from
consecutive frames, are used to avoid aliasing of the baseband approach (i.e., displacement is less than quarter wavelength).

19
Forward Problem
• Given the distribution of Young’s modulus, applied force and boundary condition, predict the strain fields.
• “Plain strain state” is usually created to reduce the 3D problem to 2D.
• Assuming isotropy, Young’s modulus is simply three times the shear modulus.
20
Inverse Problem
• Given 2D strain distribution, boundary conditions and applied force, find the Young’s modulus distribution.
• Both incompressible and compressible media are treated.
• Reconstruction is based on solving partial differential equations.

21
Tissue Incompressibility
• Soft tissue is often assumed incompressible, i.e., total volume is unchanged with applied force.
• Divergence of the displacement vector is zero.• Incompressibility can be applied to measure lateral
displacement. Note that conventional phase sensitive techniques are only sensitive to axial motion. This is the same problem encountered in Doppler imaging.

22
Vibration Amplitude Sonoelastography.
• Low frequency vibration (20-1000Hz) is applied externally.
• Tissue under inspection vibrates internally.
• Elasticity is assessed based on amplitude of the vibration.
• Doppler imaging is used to measure the vibration.
23
Vibration Amplitude Sonoelastography
c
v
tntJAttAts
cv
t
tvtv
tAts
L
m
L
m
nLnL
L
m
mm
Lm
Lm
0
00
0
0
0
2
)cos()()sin(cos)(
/cos2
)cos( signal received offrequency Inst.
)cos()( velocity Vibrating
)cos()( Signal Original
24
Vibration Amplitude Sonoelastography
• By using Doppler techniques to detect the vibrating target, and select proper threshold, softer target (large vibration amplitude) will be present and stiffer target (small vibration amplitude) will be absent.
• Bistable images.

25
Shear Wave Remote Palpation
• Tissue elasticity is done based on the spatial and temporal characteristics of the induced shear wave.
• Shear waves are induced by radiation force produced by a focused ultrasound beam.
• Shear strain is localized due to high attenuation.