
1 Team M-2: Charles Norman (M2-1) Julio Segundo (M2-2) Nan Li (M2-3) Shanshan Ma (M2-4) Design...
43
1 Team M-2: Team M-2: Charles Norman (M2-1) Charles Norman (M2-1) Julio Segundo (M2-2) Julio Segundo (M2-2) Nan Li (M2-3) Nan Li (M2-3) Shanshan Ma (M2-4) Shanshan Ma (M2-4) Design Manager Design Manager : Zack Menegakis : Zack Menegakis Presentation 13: Final Presentation May 3, 2006 Overall Project Objective: Design a low-power chip that navigates an aircraft to pre- determined waypoints.
-
date post
20-Dec-2015 -
Category
Documents
-
view
220 -
download
2
Transcript of 1 Team M-2: Charles Norman (M2-1) Julio Segundo (M2-2) Nan Li (M2-3) Shanshan Ma (M2-4) Design...

11
Team M-2:Team M-2:Charles Norman (M2-1)Charles Norman (M2-1)Julio Segundo (M2-2)Julio Segundo (M2-2)
Nan Li (M2-3)Nan Li (M2-3)Shanshan Ma (M2-4)Shanshan Ma (M2-4)
Design ManagerDesign Manager: Zack Menegakis : Zack Menegakis
Presentation 13: Final PresentationMay 3, 2006
Overall Project Objective:Design a low-power chip that navigates an
aircraft to pre-determined waypoints.

22
AgendaAgenda
Marketing - NanMarketing - Nan Project DescriptionProject Description How It WorksHow It Works VerificationVerification FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion

33
SkyNav is a low-power solution to today’s high
demand of autonomous vehicles, utilizing intelligent
judgments for flight corrections.

44
Unmanned Aerial VehicleUnmanned Aerial Vehicle
CommercialCommercial MilitaryMilitary

55
The MarketThe Market
The most dynamic sector of the aerospace The most dynamic sector of the aerospace industryindustry
Will more than double over the next decade, from Will more than double over the next decade, from current worldwide current worldwide UAVUAV expenditures of about $2 expenditures of about $2 billion in 2005 to $4.5 billion in 2014. billion in 2005 to $4.5 billion in 2014.
--Forecast International research reportForecast International research report

66
Why Use a Chip?Why Use a Chip?
Low-power ConsumptionLow-power Consumption
CompactCompact
Decrease ManpowerDecrease Manpower SKYNAV

77
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It WorksHow It Works VerificationVerification FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion
88
54
3
2
1
Project DescriptionProject Description
The system will be able to autopilot The system will be able to autopilot the craft through a series of 5 user the craft through a series of 5 user specified GPS coordinates in 3 specified GPS coordinates in 3 dimensionsdimensions
Our chip will calculate the Our chip will calculate the correction for altitude, latitude, correction for altitude, latitude, longitude, speed. longitude, speed.

99
Pre-Blackbox Data
CurrentCoordinates
Application DescriptionApplication Description
Waypoint Coordinates
Post-BlackboxData
Calculator(AKA Blackbox)
CoordinateCorrections
Avionics

1010
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It Works – ShanshanHow It Works – Shanshan VerificationVerification FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion

1111
Clock DivisionClock Division

1212
Flow PathFlow Path

1313
Flow PathFlow Path

1414
Flow PathFlow Path

1515
Flow PathFlow Path

1616
Flow PathFlow Path

1717
Flow PathFlow Path

1818
Flow PathFlow Path

1919
Flow PathFlow Path

2020
Flow PathFlow Path

2121
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It WorksHow It Works Verification – JulioVerification – Julio FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion

2222
VerificationVerification
Chip FunctionsChip Functions -2-d v. 3-d-2-d v. 3-d -Calculate our speed or use an input-Calculate our speed or use an input -Units: What is conventional?-Units: What is conventional? -Accuracy-Accuracy -Calculation Outsourcing-Calculation Outsourcing
Exhaustive Testing -Overflow Cases
Layout
Schematic
Structural
Behavioral
Matlab

2323
VerificationVerification
Chip FunctionsChip Functions -2-d v. 3-d-2-d v. 3-d -Calculate our speed or use an input-Calculate our speed or use an input -Units: What is conventional?-Units: What is conventional? -Accuracy-Accuracy -Calculation Outsourcing-Calculation Outsourcing
Exhaustive Testing -Overflow Cases
Layout
Schematic
Structural
Behavioral
Matlab
Serialization added
Test, Test, Test!

2424
1
2
ScenarioScenario
VerificationVerification

2525
VerificationVerification
Chip FunctionsChip Functions -2-d v. 3-d-2-d v. 3-d -Calculate our speed or use an input-Calculate our speed or use an input -Units: What is conventional?-Units: What is conventional? -Accuracy-Accuracy -Calculation Outsourcing-Calculation Outsourcing
Exhaustive Testing -Overflow Cases
Serialization added
Test, Test, Test!
Warning: Writing Sim files can cause Arthritis!Solution: Have a Script write your Sim Files
Layout
Schematic
Structural
Behavioral
Matlab

2626
VerificationVerification

2727
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It WorksHow It Works VerificationVerification FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion

2828
FloorplanFloorplanIn
pu
ts
Bla
ckb
ox
Outputs

2929
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It WorksHow It Works VerificationVerification FloorplanFloorplan Layout – CharlesLayout – Charles Final SpecificationsFinal Specifications ConclusionConclusion

3030
LayoutLayout
Comparators & Calculators
SRAM
FSM
Registers
Clock Dividers

3131
Poly (10.27)Poly (10.27)

3232
Metal 1 (30.95)Metal 1 (30.95)
3333
Metal 2 (18.65)Metal 2 (18.65)

3434
Metal 3 (11.20)Metal 3 (11.20)
3535
Metal 4 (3.68)Metal 4 (3.68)

3636
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It WorksHow It Works VerificationVerification FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion

3737
Chip SpecificationsChip Specifications
SizeSize 309.96µm x 402.39µm309.96µm x 402.39µm
AreaArea 124,724µm²124,724µm²
Transistor CountTransistor Count 28,24228,242
Aspect RatioAspect Ratio 1.301.30
Overall Trans. DensityOverall Trans. Density .226.226
3838
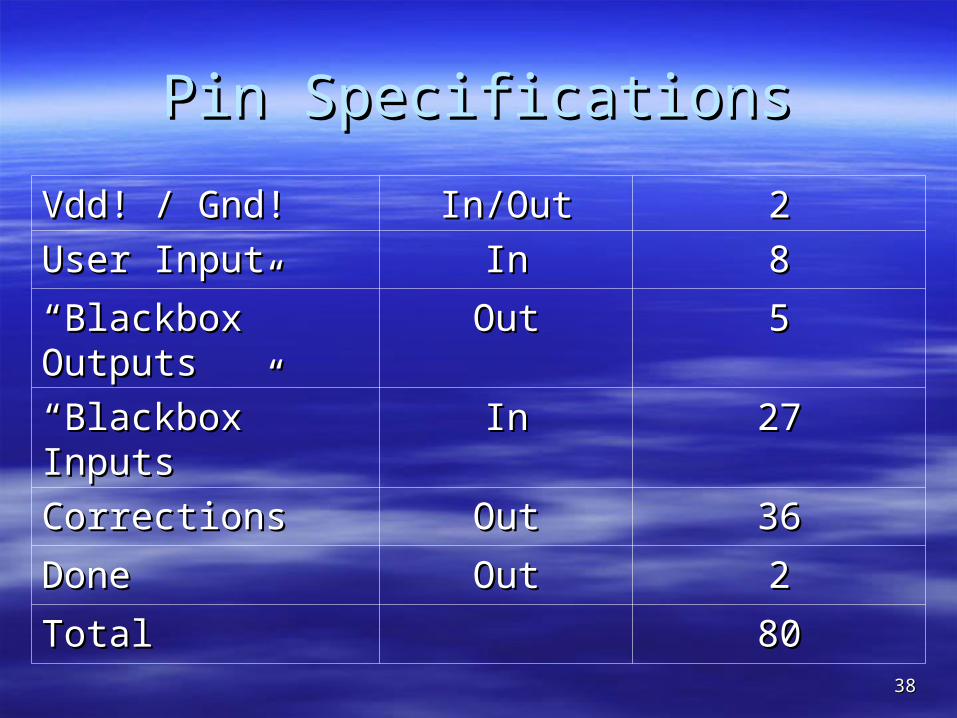
Pin SpecificationsPin Specifications
Vdd! / Gnd!Vdd! / Gnd! In/OutIn/Out 22
User InputUser Input InIn 88
““Blackbox” OutputsBlackbox” Outputs OutOut 55
““Blackbox” InputsBlackbox” Inputs InIn 2727
CorrectionsCorrections OutOut 3636
DoneDone OutOut 22
TotalTotal 8080
3939
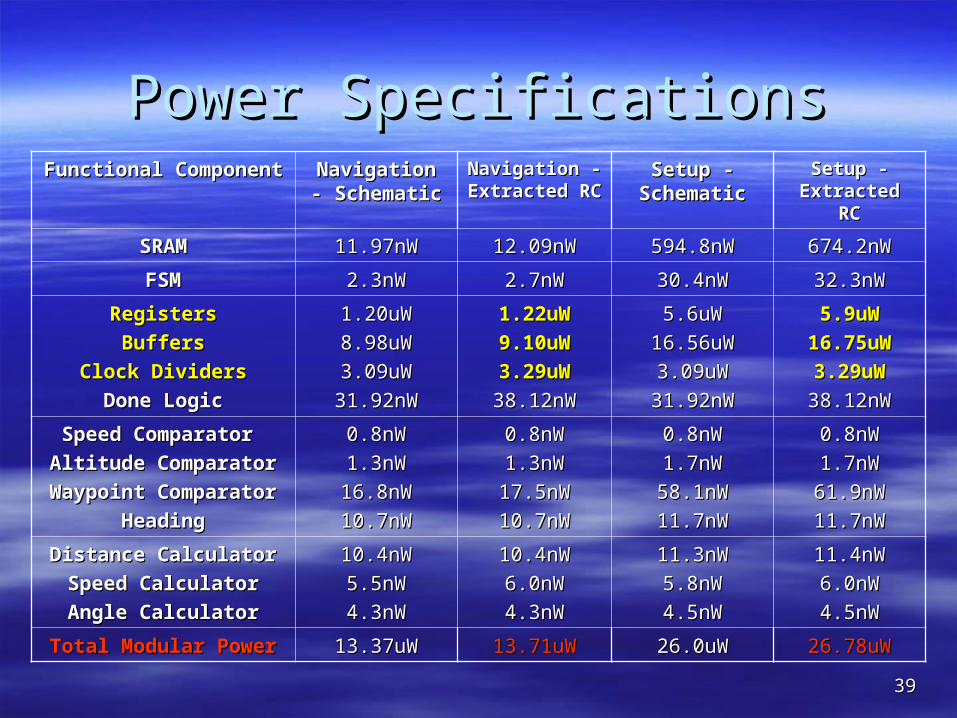
Power SpecificationsPower SpecificationsFunctional ComponentFunctional Component Navigation - Navigation -
SchematicSchematicNavigation -Navigation -
Extracted RCExtracted RCSetup - Setup -
SchematicSchematicSetup - Setup -
Extracted RCExtracted RC
SRAMSRAM 11.97nW11.97nW 12.09nW12.09nW 594.8nW594.8nW 674.2nW674.2nW
FSMFSM 2.3nW2.3nW 2.7nW2.7nW 30.4nW30.4nW 32.3nW32.3nW
RegistersRegisters
BuffersBuffers
Clock DividersClock Dividers
Done LogicDone Logic
1.20uW1.20uW
8.98uW8.98uW
3.09uW3.09uW
31.92nW31.92nW
1.22uW1.22uW
9.10uW9.10uW
3.29uW3.29uW
38.12nW38.12nW
5.6uW5.6uW
16.56uW16.56uW
3.09uW3.09uW
31.92nW31.92nW
5.9uW5.9uW
16.75uW16.75uW
3.29uW3.29uW
38.12nW38.12nW
Speed Comparator Speed Comparator
Altitude ComparatorAltitude Comparator
Waypoint ComparatorWaypoint Comparator
HeadingHeading
0.8nW0.8nW
1.3nW1.3nW
16.8nW16.8nW
10.7nW10.7nW
0.8nW0.8nW
1.3nW1.3nW
17.5nW17.5nW
10.7nW10.7nW
0.8nW0.8nW
1.7nW1.7nW
58.1nW58.1nW
11.7nW11.7nW
0.8nW0.8nW
1.7nW1.7nW
61.9nW61.9nW
11.7nW11.7nW
Distance CalculatorDistance Calculator
Speed CalculatorSpeed Calculator
Angle CalculatorAngle Calculator
10.4nW10.4nW
5.5nW5.5nW
4.3nW4.3nW
10.4nW10.4nW
6.0nW6.0nW
4.3nW4.3nW
11.3nW11.3nW
5.8nW5.8nW
4.5nW4.5nW
11.4nW11.4nW
6.0nW6.0nW
4.5nW4.5nW
Total Modular PowerTotal Modular Power 13.37uW13.37uW 13.71uW13.71uW 26.0uW26.0uW 26.78uW26.78uW

4040
AgendaAgenda
MarketingMarketing Project DescriptionProject Description How It WorksHow It Works VerificationVerification FloorplanFloorplan LayoutLayout Final SpecificationsFinal Specifications ConclusionConclusion

4141
Reaching Our Main GoalReaching Our Main Goal I/O Count > 200 I/O Count > 200 Serialization Serialization Increased Increased
PowerPower
This led to…This led to…

4242
ConclusionConclusion Gripe is always up to increase your quotaGripe is always up to increase your quota
Changing schematics while someone is Changing schematics while someone is trying to LVS the top-level layout leads to trying to LVS the top-level layout leads to tearstears
We are proud of our design (no pre-We are proud of our design (no pre-discovered algorithms used)discovered algorithms used)

4343
Q & AQ & A


















