1 Search for Lost Objects Walter Stromquist At Bryn Mawr College October 24, 2005.
45
1 Search for Lost Objects Walter Stromquist At Bryn Mawr College October 24, 2005
-
Upload
tracey-bradley -
Category
Documents
-
view
214 -
download
0
Transcript of 1 Search for Lost Objects Walter Stromquist At Bryn Mawr College October 24, 2005.
1
Search for Lost Objects
Walter Stromquist
At Bryn Mawr College
October 24, 2005

2
Link to WVEC’s Mizar story:
http://www.wvec.com/news/local/stories/wvec_local_081505_ghost_fleet_mizar.77e63f58.html
Link to version on this disk:
mizar.html

3
More Ghost Fleet ships leave the James River
03:50 PM EDT on Tuesday, August 16, 2005
A Ghost Fleet ship left on her final voyage Tuesday and another will leave Wednesday.
By 7:30 a.m., The Mizar was moving from her berth in the James River off Fort Eustis and will end up at Bay Bridge Enterprises, LLC, on the southern branch of the Elizabeth River in Chesapeake. There, she'll be dismantled.
During her career, according to the Naval Historical Center, Mizar played an important role in locating and examining the wrecks of the lost nuclear submarines Thresher and Scorpion in the 1960s and in finding and recovering a lost thermonuclear weapon off the coast of Spain.
The USNS Mizar was a small ice-breaking cargo ship in Avondale, Louisiana in 1957 and was converted to a research vessel in 1964. She left active service in the early 1990s and was turned over to the U.S. Maritime Administration.
On Wednesday, The Sunbird will be towed to Bay Bridge Enterprises for dismantling. The Sunbird, a Chanticleer-class submarine rescue ship, was built in Savannah, Georgia and launched in April 1946.
Bay Bridge Enterprises LLC won contracts worth $329,000 to dispose of the two obsolete vessels
The MIzar took her last trip Tuesday. She'll be dismantled in Chesapeake.

4
Palomares, Spain

5
Lost H-Bomb
Mid-air collision January 17, 1966
Four bombs lost; three recovered immediately
Fourth bomb found 80 days later in 2600 feet of water
Search team:
John Craven, Navy Oceanographer
Mathematicians from Wagner, Associates
Methods:
Probability map – Monte Carlo simulation
Bayesian updating as search proceeded

6
7
Wikipedia on Palomares:
http://en.wikipedia.org/wiki/Palomares

8
Palomares, SpainFrom Wikipedia, the free encyclopedia.
Palomares is a fishing village in Spain.
On January 17, 1966 a B-52 bomber of the USAF Strategic Air Command crashed into a KC-135 tanker while refueling. Of the four hydrogen bombs that it carried, three were found on land, while the fourth was lost at sea. It was recovered eighty days later. 1,400 tons of contaminated material were excavated and sent to South Carolina for disposal.
U.S. Defense Secretary Robert McNamara publicly assigned a value to the lost bomb of two billion U.S. dollars. The search for the fourth bomb was carried out by means of a novel mathematical method, Bayesian search theory, which assigns probabilities to individual map grid squares, then updates these as the search progresses. The mathematical team, from Wagner Associates, was led by Dr John Craven. The method requires as input initial probabilities for the grid squares, and these probabilities made use of the fact that a local fisherman, Francisco Ortiz, witnessed the bomb entering the water at a certain location. Ortiz contracted with the US Air Force to assist in the search operation. After the bomb had been located, Ortiz turned up at the First District Federal Court building in New York City with his lawyer, Herbert Brownell, formerly Attorney General of the United States under President Dwight Eisenhower, claiming salvage rights on the recovered hydrogen bomb. According to Craven:
"It is customary maritime law that the person who identifies the location of a ship to be salvaged has the right to a salvage award if that identification leads to a successful recovery. The amount is nominal, usually 1 or 2 percent, sometimes a bit more, of the intrinsic value to the owner of the thing salvaged. But the thing salvaged off Palomares was a hydrogen bomb, the same bomb valued by no less an authority than the Secretary of Defense at $2 billion — each percent of which is, of course, $20 million.“
The Air Force settled out of court.

9
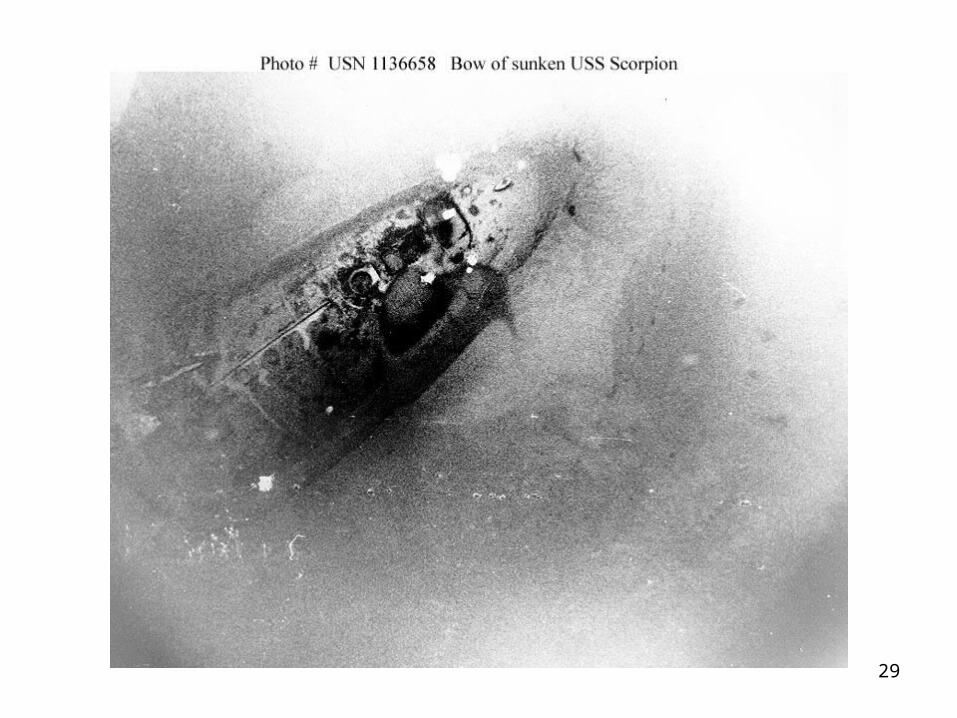
USS Scorpion
Lost south of Azores, May 22, 1968; failed to return to New London May 27
Search was guided by recorded sounds of an explosion … that seemed to indicate that the submarine was heading east. (How would we know?)
Search included five cruises by Mizar, from June 10 to November 2
Scorpion found in 10000 feet of water on October 28
Likely cause: torpedo explosion (?)
References:Craven: Silent WarBlind Man’s BluffSilent Steel (forthcoming)

10

11
Mathematics in the Scorpion search
Direction-finding by sonar
Constructing a probability map by Monte-Carlo simulation
Understanding search effectiveness using sweep width
Estimating success probability for a proposed search plan
Updating a probability map for prior search (Bayesian updates)
12
Operations Analysis
During the Underwater
Search for Scorpion
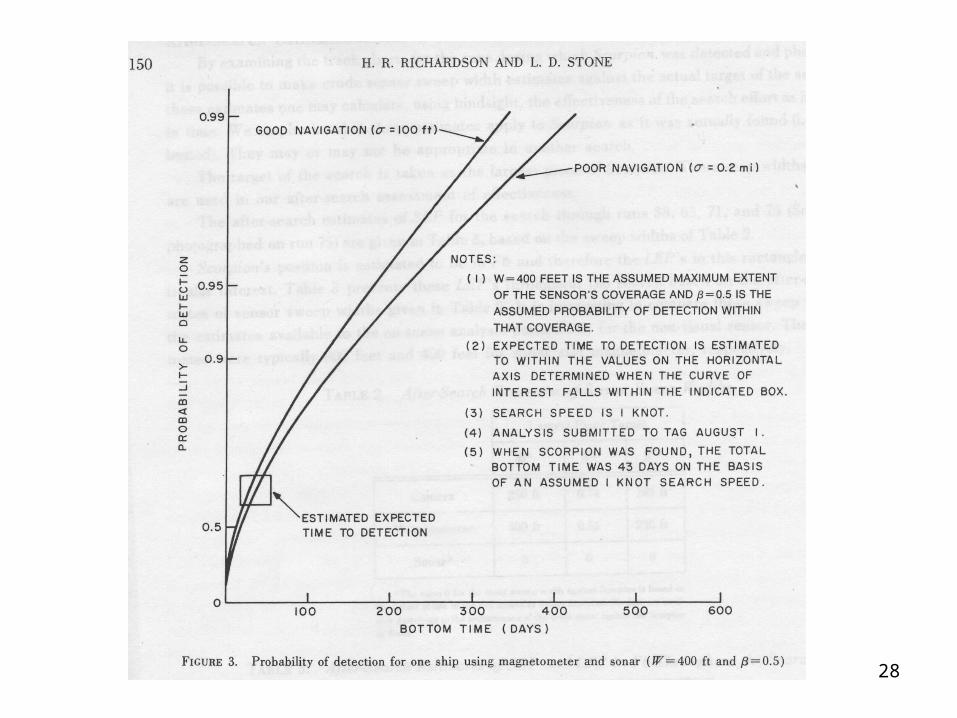
Henry R. Richardson
Lawrence D. Stone
Naval Research Logistics Quarterly

13
Location by sonar
Scorpion’s path

14
Location by sonar
Scorpion’s path

15
Probability Map
Search grid – cells 1 mile (north-south) by 0.84 mile (east-west)
Original search map:
Based on nine scenarios
Uncertainty in location of explosion, direction and distance of
motion after explosion
Monte-Carlo simulation of each scenario

16

17

18
Local Effectiveness Probability (LEP)
Assuming the target is in cell, say, F6, and assuming that x hours of search are allocated to cell F6, what is the probability of finding the target?
Navigation --- standard deviation 300 feet in any direction
Range of magnetometer --- 200 feet either side of search track, with 50% probability of finding the target within this range (Camera, sonar less effective)
Sweep width = 200 feet --- one mile of track covers 4% of cell.
Chance of failure: 0.96

19

20
Random search formula
Chance of failure on x independent 1-hour sweeps:
(0.96)x = ( 1 – Wx )x
Chance of success:
LEP = 1 – ( 1 – Wx )x
Better:
Conditional probability of success
= LEP
= 1 – e–Wx
where:
W = sweep rate (fraction of cell per hour)
x = number of hours of search in cell
21
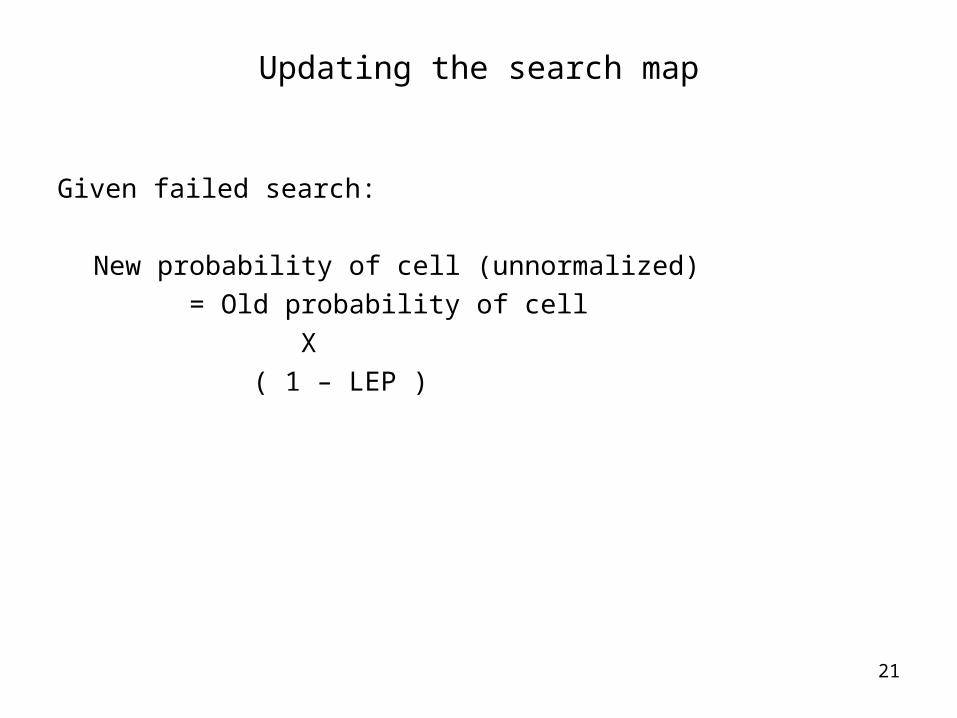
Updating the search map
Given failed search:
New probability of cell (unnormalized)
= Old probability of cell
X
( 1 – LEP )

22
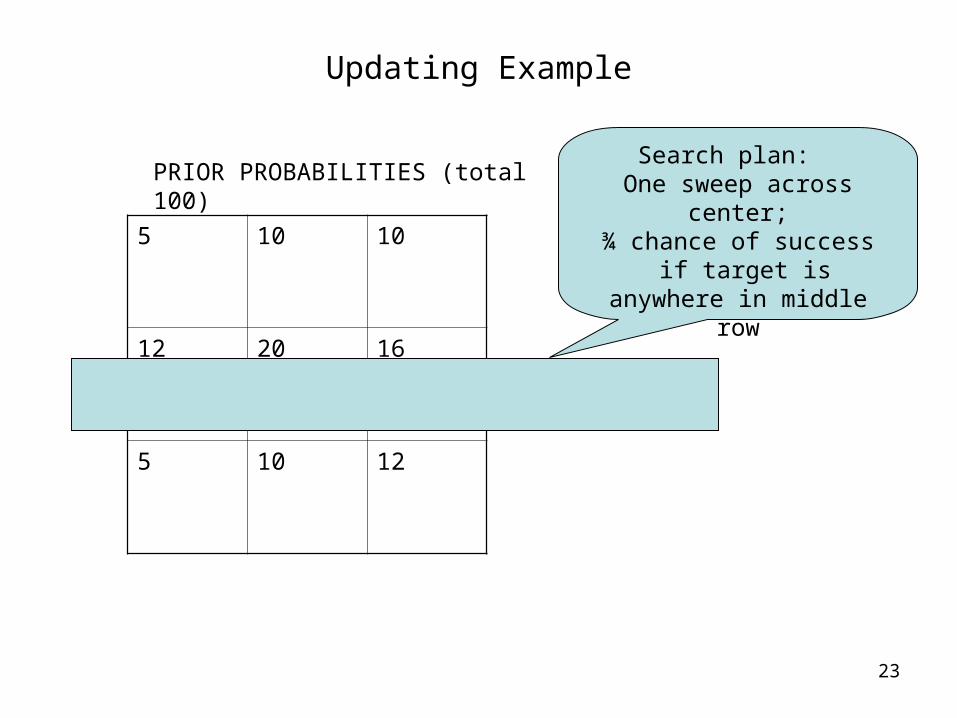
Updating Example
5 10 10
12 20 16
5 10 12
PRIOR PROBABILITIES (total 100)
23
Updating Example
5 10 10
12 20 16
5 10 12
PRIOR PROBABILITIES (total 100)Search plan:
One sweep across center;¾ chance of success
if target is anywhere in middle row
24
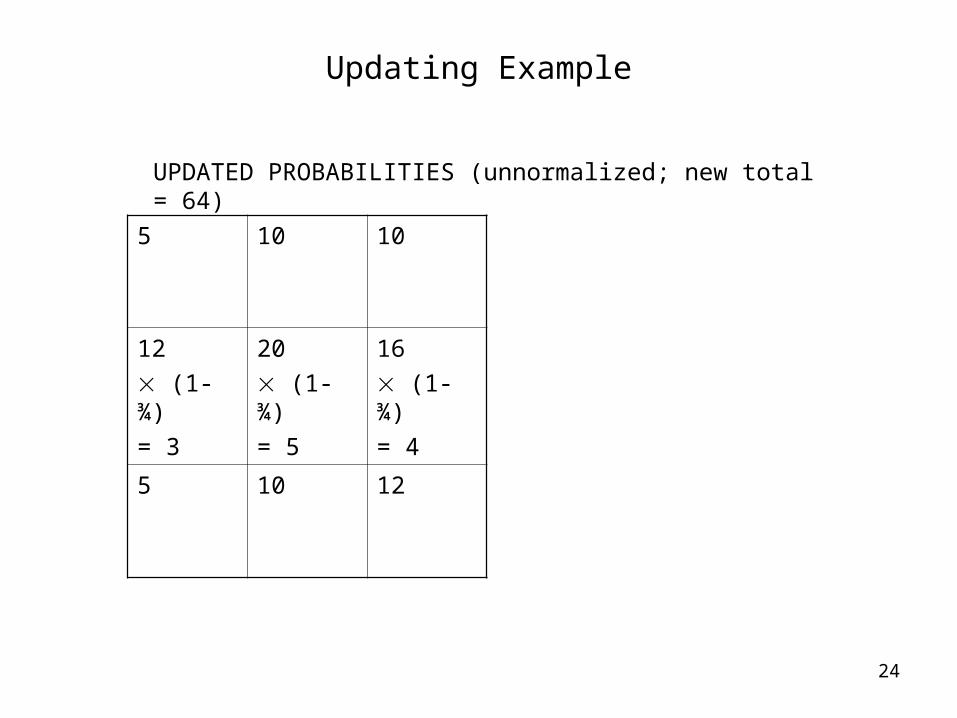
Updating Example
5 10 10
12
(1-¾)
= 3
20
(1-¾)
= 5
16
(1-¾)
= 4
5 10 12
UPDATED PROBABILITIES (unnormalized; new total = 64)

25
Updating Example
7.8 15.6 15.6
4.7 7.8 6.3
7.8 15.6 18.8
UPDATED PROBABILITIES (normalized; sum = 100)
26
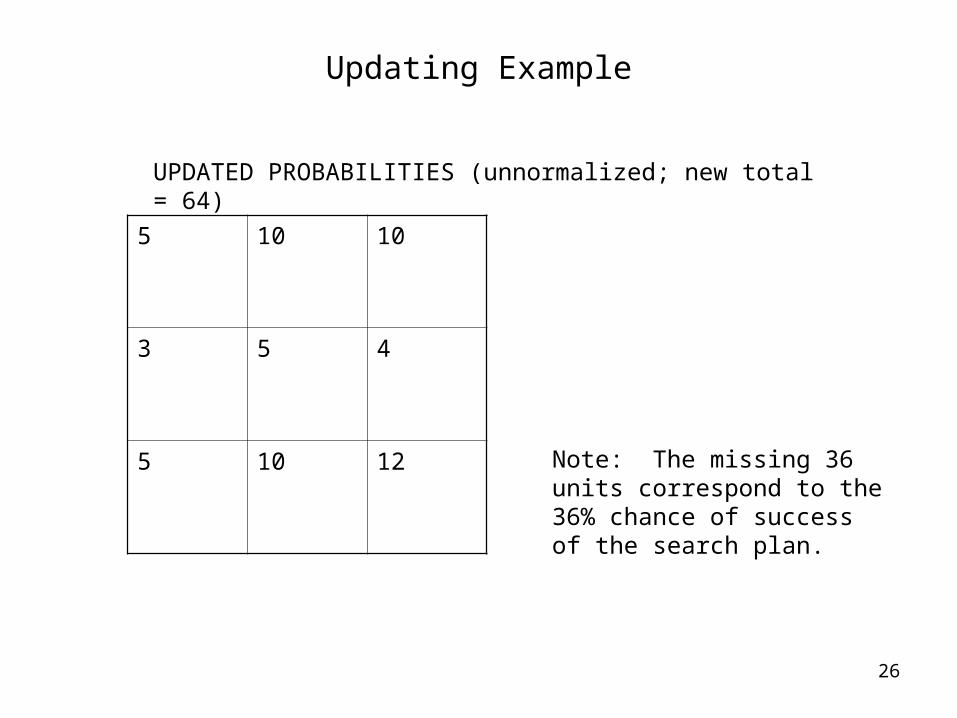
Updating Example
5 10 10
3 5 4
5 10 12
UPDATED PROBABILITIES (unnormalized; new total = 64)
Note: The missing 36 units correspond to the 36% chance of success of the search plan.

27
Search Effectiveness Probability (SEP)
Probability of finding the target with a given search plan:
all cells
SEP Prob. target is in cell LEP for cell
28
29
30
Issues in Scorpion Search
WAS THE SEARCH ALLOCATION OPTIMAL?
WHAT IS THE OPTIMAL ALLOCATION OF EFFORT?
Allocate effort to highest-probability cell, until its probability is reduced to that of next-highest cell;
Then, allocate effort uniformly over all maximum-probability cells.
BUT…
Search was constrained by instruments; plans aimed at specific cells necessarily spilled over into neighboring cells.

31

32

33

34
Issues in Scorpion Search
UNCERTAIN SWEEP WIDTH…
If time goes by without detection, isn’t that evidence that the sweep width is less than we thought?

35
Issues in Scorpion Search
UNCERTAIN SWEEP WIDTH…
If time goes by without detection, isn’t that evidence that the sweep width is less than we thought?
Amount of search effort in cell
1
Random search formula
LEP for cell
36
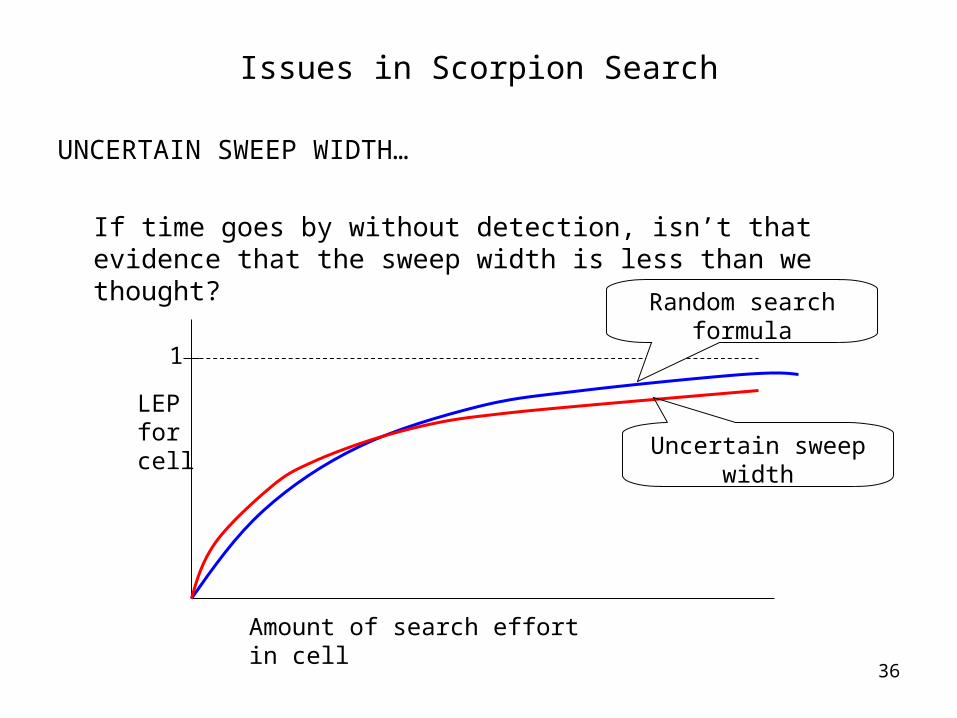
Issues in Scorpion Search
UNCERTAIN SWEEP WIDTH…
If time goes by without detection, isn’t that evidence that the sweep width is less than we thought?
Amount of search effort in cell
1
Random search formula
Uncertain sweep width
LEP for cell

37
Other refinements…
Sweep width depends on cell…
Cost of search depends on cell…
Value of finding target depends on cell…

38
Models of search effort
Peanut-butter search…
Cookie-cutter search…
Cell search…
Searcher path problems…
39
Significance of time horizon
A myopic search plan is one that optimizes, at each stage, the probability of success in that stage.
Is a myopic search optimal? Or, might there be plans that sacrifice early success probability in order to increase search probability later on?

40
Significance of time horizon
A myopic search plan is one that optimizes, at each stage, the probability of success in that stage.
Is a myopic search optimal? Or, might there be plans that sacrifice early success probability in order to increase search probability later on?

41
Significance of time horizon
A myopic search plan is one that optimizes, at each stage, the probability of success in that stage.
Is a myopic search optimal? Or, might there be plans that sacrifice early success probability in order to increase search probability later on?

42
Significance of time horizon
A myopic search plan is one that optimizes, at each stage, the probability of success in that stage.
Is a myopic search optimal? Or, might there be plans that sacrifice early success probability in order to increase search probability later on?
43
Moving target problems
Assume (for example) Markov target motion --- target’s location at each time step is probabilistic, but depends only on location at previous step
Assume peanut-butter search, with limited amounts of effort in each time period
Constructing a myopic search plan:
1. Allocate search effort for time period 1
2. Update target distribution for prior search
3. Update target distribution for target motion
4. Allocate search effort for time period 2, etc.

44
T-optimal plan
Optimal plan for T time steps (Scott Brown’s algorithm)
Allocate effort myopically
Now, repeat many times:
For each time step t, from 1 to T…
Replace the allocation at time step t with the allocation
that is optimal, GIVEN ALL SEARCH BEFORE AND AFTER t.
The allocation converges to a plan that is optimal for T time steps.
45
Searcher-path problems
Target may be stationary or moving
Searcher is constrained to follow a path