![Æ v u v } ( Z } ] o ] u } ( Z P µ ] } v } ( v P o Z ( } u Z P } Ç ......^ ] } ( Z } u u ] ( } À o } u v W } o ] Ç U h v ] E ] } v u v ( } } v } u ] v ^ } ] o ( ( ] U í U î ì](https://static.fdocuments.us/doc/165x107/60abf540d41fca44cc46e0de/-v-u-v-z-o-u-z-p-v-v-p-o-z-u-z-p-.jpg)
1 Robot 1 - mechanicaldesign.iit.edu - Homemechanicaldesign.iit.edu/.../climbing_robot_analysis.pdf3...
4
MMAE 232 Bioinspired Homework These examples of bio-inspired robot configurations are only a small sample of the possibilities. Please use them for inspiration, but do not be constrained by them. Also note that I made several assumptions here to keep things simple. 1 Robot 1 mg B x B y A x d l Wall Peg Robot Body Robot Arm Robot Tail Figure 1: Robot example 1 Consider the robot shown in Figure 1, which shows a side view of the robot consisting of a body, arm, and tail. The robot’s center of mass lies farther from the wall than the robot arm contact point on the peg (point B). The vertical distance from the tail contact point to the robot arm contact point is l. The horizontal distance from the center of mass to the robot arm con- tact point is d. The robot has a mass of m, and gravity, g, acts downward. Assume that the tail contact point is frictionless (it greatly simplifies the analysis). Write the three static equa- tions for this robot. For the moment equa- tion, sum about point B, the arm contact point. The robot will stay on the pegs and wall if the reaction force, B x , at the arm/peg interface is less than the friction force such that: B x < μB y where μ is the coefficient of friction. Know- ing this, along with the three static equilibrium equations you found above, find a relationship between d, l, and μ. To improve stability, do you want d, l, and μ to be small or large? Think about this as you design your robot. What happens if d becomes negative? In other words, the center of mass lies between the wall and the arm point of contact on the peg? 1
Transcript of 1 Robot 1 - mechanicaldesign.iit.edu - Homemechanicaldesign.iit.edu/.../climbing_robot_analysis.pdf3...
-
MMAE 232 Bioinspired Homework
These examples of bio-inspired robot configurations are only a small sample of the possibilities. Pleaseuse them for inspiration, but do not be constrained by them. Also note that I made several assumptionshere to keep things simple.
1 Robot 1
mg
Bx
By
Ax
d
lWall
Peg
RobotBody
Robot Arm
Robo
t Tail
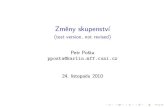
Figure 1: Robot example 1
Consider the robot shown in Figure 1, whichshows a side view of the robot consisting of abody, arm, and tail. The robot’s center of masslies farther from the wall than the robot armcontact point on the peg (point B). The verticaldistance from the tail contact point to the robotarm contact point is l. The horizontal distancefrom the center of mass to the robot arm con-tact point is d. The robot has a mass of m, andgravity, g, acts downward. Assume that the tailcontact point is frictionless (it greatly simplifiesthe analysis). Write the three static equa-tions for this robot. For the moment equa-tion, sum about point B, the arm contactpoint.
The robot will stay on the pegs and wall if thereaction force, Bx, at the arm/peg interface isless than the friction force such that: Bx < µBywhere µ is the coefficient of friction. Know-ing this, along with the three static equilibriumequations you found above, find a relationshipbetween d, l, and µ.
To improve stability, do you want d, l,and µ to be small or large? Think about thisas you design your robot.
What happens if d becomes negative?In other words, the center of mass lies betweenthe wall and the arm point of contact on the peg?
1
-
2 Robot 2
Bx
By
mg
Ax
d
l
Peg
Peg
Peg
Ro
bo
t Arm
RobotBody
Peg
Peg
Peg
Peg
Figure 2: Robot example 2
Consider the robot shown in Figure 2, which shows theview as if you are looking directly at the face of the climb-ing wall. The robot consists of two rigid bodies, a mainrobot ‘body’ and a ‘arm.’ The robot crawls up the sideof the pegs only; no part of the robot touches the wallitself. The vertical distance from the body contact pointto the robot arm contact point is l. The horizontal dis-tance from the center of mass to the robot arm contactpoint is d. The robot has a mass of m, and gravity, g,acts downward.
Knowing what you know from the first exam-ple, write down the relationship between d, l, andµ, the coefficient of friction between the arm andthe peg.
2
-
3 Robot 3
mg
Robot Body
θ
τRobot Arm
Ro
bo
t A
rm
Robot Arm
Robo
t Arm
Figure 3: Robot example 3
Consider the robot shown in Figure 3. It usestwo arms to pull itself up the pegs, so that oneleg (as shown) needs to pull a load of mg/2. Forthis type of robot, the leg needs to be able to liftthe robot. Given that the torque on the HitecServos that we use is 320 mN m and the lengthof the leg is l, find the relationship betweenthe mass, torque, leg length, and angle θby summing the moments about the servo joint.
Using Matlab or Python, plot the mass as afunction of l and θ.
Do you want l to be large or small?
Qualitatively, what happens to your robotif you make l really large?
Qualitatively, what happens to your robotif you make l really small?
What is maximum mass you can makeyour robot?
A factor of safety is a multiplier that is essen-tially a ‘fudge factor’ in your designs. For exam-ple, if you calculated the maximum mass to be1 kg and you have a factor of safety of 1.1, youwould try to build a robot with a mass less than1/1.1 =0.91 kg. This would account for mistakes made in your assumptions or inaccuracies in the torquemeasurements for the servo. What do you think would be a reasonable factor of safety for yourrobot?
3
-
4 Robot 4
l1
l2
lc1
lc2
m g1
m g2
θ1
θ2
Peg
Peg
Peg
Peg
Peg
τ1
τ2
Bx
By
Ax
Figure 4: Robot example 4
Consider the robot shown in Figure 4, which con-sists of three rigid links. The outer two linksserve as arms, and the middle link serves at thebody. One servo sits at each of the two jointsbetween the links, exerting torque τ1 and τ2, re-spectively. The middle link has mass m1. Theright link has mass m2. The length of the middlelink is l1. The center of mass of the middle linklies lc1 from the left joint. The length of the rightlink is l2. The center of mass of the right link lieslc2 from the right joint. The angle between thehorizontal and the middle link is θ1. The anglebetween the middle link and right link is θ2.
We are concerned on whether or not theservos have enough torque to raise the arms.Which servo (associated to τ1 or τ2) needshigher torque as the robot is drawn here?
Solve for the required torque of thatservo by summing the moments aboutthat joint.
Based on that equation, what are theangles, θ1 and θ2, that maximize the re-quired torque?
To make things easier, assume that themasses are the same (m1 = m2) and solve for m.
Knowing that the horizontal distance between the pegs is 152 mm, the vertical distance is 102 mm, assumethat the l1 = l2 = 110 so that the arm is long enough to reach the next peg and that the center of mass liesin the middle of the robot arms (lc1 = 0.5l1, lc2 = 0.5l2). Compute the maximum mass of each of therobot arms knowing that the servo torque is 320 N mm
4
![u } ( ] } ] v ] } ] W u } ( Z , µ u v' µ } v v } Z u } Z P ] Z ] Z ] } o ......^ ] P v ] ( ] v ] o P } Á Z ] v Z i i µ v µ u v ] o µ u U u } o Ç ] v Z ] o Z } µ o o X U W](https://static.fdocuments.us/doc/165x107/5fe8f78cb53138045e647015/-u-v-w-u-z-u-v-v-v-z-u-z-p-z-z-o-.jpg)
![d ] u d o ( } P d Z ] z ^ ] Æ Z ^ u ~Z P µ o l^ µ o u v Ç Æ u ] v ...krishnauniversity.ac.in/Examinations/timetables2016-17...d ] u d o ( } P d Z ] z ^ ] Æ Z ^ u ~Z P µ o l^](https://static.fdocuments.us/doc/165x107/600bb41e108071656e540e8f/d-u-d-o-p-d-z-z-z-u-z-p-o-l-o-u-v-u-v-d.jpg)
![u Ç E u W z z z z z z z z z z z z h v ] ñ P v W ^ ] o Z ...](https://static.fdocuments.us/doc/165x107/62df142c439ef951be27fa51/u-e-u-w-z-z-z-z-z-z-z-z-z-z-z-z-h-v-p-v-w-o-z-.jpg)


![t Z Á Á ] Z u Z o Z M6ac914a1-6857-4d06... · Z u KW , ( ] o µ ~ u Ç u Z o Z o ] u ] î ì í ò rE } ( } ] ] µ ] } v } µ ] P u v](https://static.fdocuments.us/doc/165x107/5ec4450cb7e51a165221e8ab/t-z-z-u-z-o-z-m-6ac914a1-6857-4d06-z-u-kw-o-u-u-z-o-z.jpg)
![K ( ( ] } ( Z } u u ] ] } v ( } v v Æ u ] v ] } v U d Z ...€¦ · K ( ( ] } ( Z } u u ] ] } v ( } v v Æ u ] v ] } v U d Z ] µ À v v Z µ u](https://static.fdocuments.us/doc/165x107/5f0269a77e708231d40426b6/k-z-u-u-v-v-v-u-v-v-u-d-z-k-z-u-u.jpg)
![C€¦ · Y ^ ~ \ ` U Z h Y U _ Y ] W Y Z [\] ^ _ Y X U Z S X ` Y ] U Y U _ ^ Z a] Z \ ` Z T W h l h Y \ w ² Y ^ ~ n [\] Z S ´ Z \ ` W h U X Y Z T ^ _ Y X U Z ` Y ] Y U _ ^ Z a](https://static.fdocuments.us/doc/165x107/5f9823dc5a74ed7bae44a339/c-y-u-z-h-y-u-y-w-y-z-y-x-u-z-s-x-y-u-y-u-z-a-z-.jpg)

![Z P K ( ( ] W ô ì í U h u ^ Z v ] u v U < v l Z } U Z v Z ] r ô ï ð ì ì ......Z P K ( ( ] W ô ì í U h u ^ Z v ] u v U < v l Z } U Z v Z ] r ô ï ð ì ì ô U: Z l Z v](https://static.fdocuments.us/doc/165x107/609d7cb14d5ef069b66ff2d1/z-p-k-w-u-h-u-z-v-u-v-u-v-l-z-u-z-v-z-r-.jpg)
![Document7 - FJMC.../ u o ] P Z ] v P Z ] z o o } Á v o ] v u u } Ç } ( : Z z< t/>< } ( >K Á Z } ] Z , >DEK](https://static.fdocuments.us/doc/165x107/5f5d7c042cb34e6a0a6bab80/document7-fjmc-u-o-p-z-v-p-z-z-o-o-v-o-v-u-u-z-z.jpg)
![~ ' } À v u v } ( D Z Z v ] } ( , v ] Z Z } ( u Ç ^ } W ] u ' } À …...~ ' } À v u v } ( D Z Z v ] } ( , v ] Z Z } ( u Ç ^ } W ] u ' } À X , ] P ... ... K v](https://static.fdocuments.us/doc/165x107/5e8a074c03ac1b2a630583b7/-v-u-v-d-z-z-v-v-z-z-u-w-u-.jpg)

![D ] o ] v P , } u Z µ Z · D ] o ] v P , } u Z µ Z W XK X } Æ ð ð ï W ] . Z µ Z W Z v } u W v Z U u } ] ï ï ï î D P v } o ] À v µ u ] o W } µ Z l } P u ] o X } u > }](https://static.fdocuments.us/doc/165x107/5f9cdcca86446a43cb231910/d-o-v-p-u-z-z-d-o-v-p-u-z-z-w-xk-x-w-z-.jpg)

![W Z ] o o Z ] , ] } ] o } u u ] ] } vW Z ] o o Z ] Z P ...](https://static.fdocuments.us/doc/165x107/61b54b3354d9af24ea2f7fd4/w-z-o-o-z-o-u-u-vw-z-o-o-z-z-p-.jpg)