1. Parte Practicas Electrotecnia - Universidad de Almería · PDF fileManual de...
58
Manual de prácticas 7 ÍNDICE Práctica nº1: Introducción y circuitos de corriente alterna monofásica. 9 Práctica nº2: Máquinas rotativas. Funcionamiento como gernerador. Alternadores y dínamos de corriente contínua. 21 Práctica nº3: Máquinas rotativas. Funcionamiento como motor. Motor trifásico de inducción 37 Práctica nº4: Corrección del factor de potencia o compensación de energía reactiva 55 Práctica nº5: Circuitos eléctricos:Simbología y Tipos de representación. 65 Práctica nº6: Riesgos eléctricos. Medidas preventivas y de protección contra los daños de origen eléctrico. 79 Práctica nº7: Transformador monofásico 101 Ejercicios de aplicación 104 Apéndice 1: Terminología 110 Apéndice 2: Unidades 117 Bibliografía 120
Transcript of 1. Parte Practicas Electrotecnia - Universidad de Almería · PDF fileManual de...

Manual de prácticas
7
ÍNDICE Práctica nº1: Introducción y circuitos de corriente alterna monofásica. 9 Práctica nº2: Máquinas rotativas. Funcionamiento como gernerador. Alternadores y dínamos de corriente contínua. 21 Práctica nº3: Máquinas rotativas. Funcionamiento como motor. Motor trifásico de inducción 37 Práctica nº4: Corrección del factor de potencia o compensación de energía reactiva 55 Práctica nº5: Circuitos eléctricos:Simbología y Tipos de representación. 65 Práctica nº6: Riesgos eléctricos. Medidas preventivas y de protección contra los daños de origen eléctrico. 79 Práctica nº7: Transformador monofásico 101 Ejercicios de aplicación 104 Apéndice 1: Terminología 110 Apéndice 2: Unidades 117 Bibliografía 120

Manual de prácticas
8

Manual de prácticas
9
PRÁCTICA Nº 1
INTRODUCCIÓN Y
CIRCUITOS DE CORRIENTE ALTERNA MONOFÁSICA
1. INTRODUCCIÓN Recibe el nombre de Electrotecnia, en sentido amplio, la ciencia que estudia las leyes particulares de la energía eléctrica o electricidad, así como los procedimientos, aparatos y máquinas empleados para producirla, transportarla, transformarla y utilizarla prácticamente. En sentido estricto, Electrotecnia es la ciencia que se ocupa de las aplicaciones técnicas de la electricidad. La energía eléctrica se produce en las centrales eléctricas y las máquinas que la producen se llaman generadores eléctricos, sobre los que trataremos en la Práctica Nº 2. La energía eléctrica se transporta por medio de líneas eléctricas de Alta Tensión y se distribuye por medio de líneas de Media Tensión y de redes de Baja Tensión. En numerosas ocasiones se necesita transformar la energía eléctrica y ello se hace en unas instalaciones denominadas Subestaciones y Centros de Transformación, todo lo cual se estudia en la asignatura de Electrificación Rural en Media Tensión, con base en los correspondientes reglamentos de Líneas Aéreas de Alta Tensión y de Centros de Transformación. Los transformadores, como el resto de máquinas eléctricas se estudiarán en Electrotecnia. Los aparatos que utilizan la energía eléctrica se conocen con el nombre genérico de receptores. Para alimentar a los receptores hay que diseñar circuitos y un conjunto de circuitos con su aparamenta constituye una instalación eléctrica. Esta materia se estudiará en profundidad en la asignatura de Instalaciones Eléctricas Agroindustriales en Baja Tensión, con base en el Reglamento Electrotécnico para Baja Tensión (REBT). Del REBT tomamos las siguientes definiciones, imprescindibles para la comprensión de la materia que sigue. FUENTE DE ENERGÍA: Aparato generador o sistema suministrador de energía eléctrica. FUENTE DE ALIMENTACIÓN DE ENERGÍA: lugar o punto donde una línea, una red, una instalación o un aparato recibe energía eléctrica que tiene que transmitir, repartir o utilizar. APARAMENTA: Equipo, aparato o material previsto para ser conectado a un circuito eléctrico con el fin de asegurar una o varias de las siguientes funciones: protección, control, seccionamiento, protección.

Manual de prácticas
10
CABLE: Conjunto constituido por: uno o varios conductores aislados. Su eventual revestimiento individual. La eventual protección del conjunto. El o los eventuales revestimientos de protección que se dispongan. CANALIZACIÓN ELÉCTRICA: Conjunto constituido por uno o varios conductores eléctricos y los elementos que aseguran su fijación y, en su caso, su protección mecánica. LÍNEA GENERAL DE DISTRIBUCIÓN: Canalización eléctrica que enlaza otra canalización, un cuadro de mando y protección o un dispositivo de protección general con el origen de canalizaciones que alimentan distintos receptores, locales o emplazamientos. CONDUCTOR DE UN CABLE: Parte de un cable que tiene la función específica de conducir corriente. CONDUCTORES ACTIVOS: Se consideran como conductores activos en toda instalación los destinados normalmente a la transmisión de la energía eléctrica. Esta consideración se aplica a los conductores de fase y al conductor neutro en corriente alterna y a los conductores polares y al compensador en corriente continua. CIRCUITO: Un circuito es un conjunto de materiales eléctricos (conductores, aparamenta, etc) de diferentes fases o polaridades, alimentados por la misma fuente de energía y protegidos contra sobreintensidades por él o los mismos dispositivos de protección. No quedan incluidos en esta definición los circuitos que formen parte de los aparatos de utilización o receptores. INSTALACIÓN ELÉCTRICA: Conjunto de aparatos y de circuitos asociados, en previsión de un fin particular: producción, conversión, transformación, transmisión, distribución o utilización de la energía eléctrica. RECEPTOR: Aparato o máquina eléctrica que utiliza la energía eléctrica para un fín determinado. RED DE DISTRIBUCIÓN: El conjunto de conductores con todos sus accesorios, sus elementos de sujeción, protección, etc., que une una fuente de energía con las instalaciones interiores o receptoras. Resumidamente, podemos decir que las partes que componen un circuito eléctrico elemental son:
- Fuente de alimentación de energía. - Aparamenta. (bornes, interruptores, relés, contactores, etc.) - Canalización eléctrica. (cables, conductores, tubos, bandejas, grapas, etc.) - Receptor (resistencias, reactancias, motores, condensadores, etc)..
1.1. LEY DE OHM. Esta importantísima ley se enuncia así: “A temperatura constante, la relación entre la tensión que se aplica entre dos puntos de un conductor o de un circuito y la intensidad que por ellos circula es constante y dicha constante nos da el valor de la resistencia de dicho

Manual de prácticas
11
conductor o circuito”. Si la tensión se mide en voltios (V) y la intensidad en amperios (A) el valor de la resistencia nos viene dado en ohmios (Ω).
IVR =
En corriente alterna, las magnitudes cambian periódicamente, se caracterizan por ser funciones sinusoidales. Se suele trabajar con esas magnitudes en el campo de los números complejos. La ley de Ohm para corriente alterna es la misma que para corriente continua. Esa constante proporciona el valor de la impedancia del circuito y su unidad es el ohmio (Ω). Y expresada como magnitudes eficaces complejas, quedaría de la forma:
IVZ =
La impedancia por lo tanto, podemos definirla como el cociente de la tensión en bornes del circuito por la corriente que fluye por ellos. Esta definición sólo es aplicable a corrientes sinusoidales. La impedancia equivalente de una asociación de varias impedacias 1Z , 2Z , 3Z , conectadas en: a.- Serie será: 321 ZZZZ ++=
b.- Paralelo será: 321 Z
1Z1
Z1
Z1
++=
La potencia activa que consume cada receptor conectado en un circuito de corriente alterna monofásica se calcula por la siguiente expresión y sus unidades son los vatios (W). P=V×I×cosϕ Siendo ϕ el ángulo de desfase entre V e I y el cosϕ el factor de potencia. 2. APARAMENTA 2.1. PROTECCIONES Al utilizar la energía eléctrica y pese a que se toman las medidas oportunas y reglamentarias, a veces es inevitable la producción de averías y en menor medida de accidentes, por lo que las instalaciones eléctricas habrá que protegerlas contra las causas siguientes:
• Protección contra Corrientes de defecto a tierra • Protección contra Sobreintensidades • Protección contra Sobretensiones

Manual de prácticas
12
a.- Protección contra corrientes de defecto a tierra. Las corrientes de defecto a tierra se producen por deficiencias o fallos de aislamiento o por contacto accidental de las personas o animales con partes activas de la instalación, pudiendo dar lugar a dos tipos de contactos CONTACTO DIRECTO: Contacto de personas o animales con partes activas de los materiales o equipos. CONTACTO INDIRECTO: Contacto de personas o animales domésticos con partes que se han puesto bajo tensión como consecuencia de un fallo de aislamiento. Al objeto de proteger, tanto a las personas y animales como a las instalaciones, contra contactos directos e indirectos, se utilizará el sistema de puesta a tierra de las masas y dispositivos de corte por intensidad de defecto, mediante el empleo de los interruptores diferenciales. Se instalarán en todas las prácticas. Su objeto es proteger a las personas de las descargas que pudieran producirse por contactos directos o indirectos. Se utilizarán los de alta sensibilidad (30 mA). En la figura tenemos el esquema eléctrico correspondiente a un interruptor diferencial bipolar. Figura1.1. Interruptor diferencial bipolar. b.- Protección contra sobreintensidades. SOBREINTENSIDAD: Es toda corriente superior a un valor asignado. En los conductores, el valor asignado es la corriente admisible. El REBT contempla dos tipos de sobreintensidades: sobrecargas y cortocircuitos.. 1.- Sobrecargas: se producen cuando por una línea circula más intensidad de corriente que la nominal, es decir la intensidad para la que ha sido calculada la línea o un receptor consume más intensidad de la nominal. Las sobrecargas pueden venir provocadas por conectar demasiados receptores en una línea eléctrica. Esto origina un aumento de intensidad (sobrecarga) por los conductores y/o receptores que puede llegar a provocar su destrucción, por solicitar de un receptor una potencia mayor de su potencia nominal.

Manual de prácticas
13
2.- Cortocircuitos: se producen cuando se unen accidentalmente dos puntos que están a distinto potencial mediante una unión conductora (sin resistencia), como por ejemplo cuando se unen dos partes activas de un circuito eléctrico. (Figura 1.2). R S T Figura 1.2. Cortocircuito Un elemento de protección contra sobreintensidades son los interruptores magneto-térmicos, que protegen contra sobrecargas (parte térmica) y contra cortocircuitos (parte magnética) que para magnitudes pequeñas se conocen como los pequeños interruptores automáticos (PIA). Se instalará en todas las prácticas a realizar. Su objetivo es proteger a la instalación de las sobrecargas y cortocircuitos. El de la figura 1.3 es del tipo bipolar, siendo su esquema el indicado. Figura1.3. Interruptor magnetotérmico bipolar. El fusible o cortacircuitos, es otro elemento de protección y está compuesto por un hilo conductor de menor sección que los conductores de la línea. En caso de sobrecarga o cortocircuito, la intensidad se eleva a valores peligrosos para los conductores de la línea y el fusible, que es más débil se funde debido al efecto Joule, e interrumpe el circuito antes de que la intensidad de la corriente alcance valores peligrosos. Los cartuchos fusibles se clasifican en dos tipos fundamentales: clase gl (de utilización general, tanto para sobrecargas como contra cortocircuitos se utiliza tanto para usos domésticos como industriales) y clase aM o de acompañamiento a motores (para proteger motores contra cortocircuitos, pues contra sobrecargas protege el relé térmico). Están calibrados en amperios, y el calibre de un fusible nos indicaría la intensidad que puede pasar por él sin fundirse. El fusible es más barato que el interruptor automático (PIA), pero éste último posee la ventaja de que una vez que han abierto el circuito por sobrecarga o cortocircuito se pueden reponer manualmente con rapidez (una vez que se haya reparado la causa de fallo) y sin necesidad de utilizar recambios, como ocurre en el caso de los fusibles. Sin embargo, es muy utilizado por poder proteger de forma económica y segura diferentes partes de una misma instalación. Con un interruptor magneto-térmico-diferencial se evitaría: accidentes por contactos, ya sean directos o indirectos, incendios por intensidades de fuga (defectos de aislamiento), calentamientos excesivos de líneas o de máquinas por sobrecargas, y los temidos cortocircuitos, tan socorridos por otra parte cuando se intenta justificar algún fuego provocado.

Manual de prácticas
14
c.- Protección contra sobretensiones. Se producen por aumento de tensión superior al valor asignado o a la tensión nominal o a la tensión de aislamiento. Puede ocurrir por accidentes atmosféricos cómo la caída de un rayo sobre una línea de alta tensión. El elemento de protección será una autoválvula o pararrayos. También se pueden producir por conmutaciones de redes (por oscilaciones debidas a maniobras) y por defectos en las redes (una apertura o corte del conductor neutro, por un contacto accidental fase-neutro, por efectos inductivos, capacitivos, etc.) y en estos casos el elemento de protección será un limitador de sobretensiones, que puede ser para la protección general con capacidad de descarga importante (40 kA), para la protección general y fina con capacidad de descarga media (15 a 8 kA) y para la protección fina con nivel de protección fino (8 kA) para la protección de material muy sensible . 2.2. APARATOS DE MANIOBRA Interruptores.- Son mecanismos destinados a abrir o cerrar circuitos. Pueden ser mono, bi, tri y tetrapolares atendiendo al número de hilos que seccionan; manuales y automáticos, por la forma en que se realice la maniobra de corte o enclavamiento y deslizantes o de salto, por la naturaleza del movimiento de los contactos. La característica principal del interruptor es su poder de corte que es la intensidad máxima que es capaz de cortar. A la hora de elegirlos además hay que considerar su intensidad y tensión nominales. Figura1.4. Interruptor Seccionador.- Es un aparato destinado a interrumpir la continuidad de un conductor cuando por éste no circula ninguna corriente. Conmutadores.- Son mecanismos que permiten seleccionar o invertir las condiciones de suministro de alguna magnitud eléctrica. Pueden ser simples, de cruzamiento,etc. 1.- Conmutador simple. Permite la conmutación de un circuito. El punto común 1 se conmuta alternativamente con el 2 ó con el 3. Su esquema eléctrico es el representado en la figura 1.4.
Figura 1.4.Conmutador simple Figura 1.5.Conmutador de cruzamiento 2.-Conmutador de cruzamiento. Es un conmutador doble. La figura1.5 representa su esquema eléctrico. Las dos posiciones del conmutador permiten conectar los puntos 1 y 2 y los puntos 3 y 4 en una de ellas, y los puntos 1 y 4 y los puntos 2 y 3 en la otra.
1
3
2

Manual de prácticas
15
2.3. LÁMPARAS 1. Lámpara fluorescente. Es una lámpara de descarga. La figura 1.6. representa el tubo fluorescente con los electrodos en sus extremos. Figura 1.6. Tubo fluorescente 2. Lámpara de vapor de mercurio. Es una lámpara de vapor de mercurio de alta presión. En la figura 1.7 se representa la lámpara que dispone de un electrodo auxiliar para el encendido.
Figura 1.7. Lámpara de vapor de mercurio 3. Balasto. Es una reactancia que se utiliza en la instalación de todas las lámparas de descarga. Su objeto es limitar la intensidad de la corriente que circula a través de la lámpara, como consecuencia de tener resistencia eléctrica negativa. En la figura1.8 se muestra su esquema eléctrico. Figura 1.8. Balasto 4. Cebador. Es una lámpara de efluvios cuyo objeto es provocar el encendido del tubo fluorescente. Está constituido por dos láminas bimetálicas en una ampolla de vidrio que contiene neón. La figura 1.9.muestra su esquema eléctrico.
Figura 1.9. Cebador

Manual de prácticas
16
3. OBJETIVOS Se trata de realizar en el laboratorio algunos montajes de circuitos eléctricos monofásicos con los objetivos concretos de:
1º.-Fijar algunos conceptos como fuente de alimentación de energía, circuito, instalación eléctrica. 2º.-Ver los componentes de un circuito de corriente alterna monofásica. 3º.-Medir la tensión, intensidad y potencia activa en dichos circuitos. 4º.-Determinar la impedancia de varios circuitos:
a.- Circuito con una lámpara. b.- Circuito con dos lámparas serie. c.- Circuito con dos lámparas en paralelo. d.- Circuito mixto dos lámparas en paralelo entre sí y una serie.
5º.- Estudiar y montar algunos circuitos que son muy habituales de encendido de puntos de luz:
a.- En primer lugar del encendido de dos lámparas incandescentes conectadas en paralelo entre si, desde dos puntos diferentes, de forma que se pueda encender y apagar indistintamente desde cada uno de ellos.
b.- En segundo lugar se pretende el encendido de tres lámparas conectadas en paralelo entre sí, desde tres puntos diferentes, de forma que se pueda encender y apagar indistintamente desde cada uno de ellos.
4. MATERIAL Se dispone de un panel con una Fuente de alimentación de Corriente alterna a 230 V y que contiene los siguientes elementos y aparatos de medida entre otros:
Interruptor diferencial, 25A, 30 mA Interruptor magnetotérmico 25 A
Lámparas: L1, L2, L3., lámparas incandescentes de 230 V, 40 W y de 230 V, 25 W.
Elementos de maniobra como: pulsadores, interruptores, conmutadores sencillos y conmutadores de cruzamiento
Voltímetros: son aparatos que miden la tensión y se conectan en paralelo. Su bobina es de muchas espiras de hilo muy fino.

Manual de prácticas
17
Amperímetros: son aparatos que miden la intensidad y se conectan en serie. Su bobina es de pocas espiras y de hilo muy grueso. Vatímetros: son aparatos que miden la potencia activa y se conectan de forma que su bobina voltimétrica esté en paralelo y la bobina amperimétrica esté en serie. A continuación podemos observar la conexión de un vatímetro monofásico. Figura 1.10. Vatímetro monofásico
Polímetros: son aparatos que pueden efectuar distintos tipos de medida, ya sean de diversas magnitudes (tensión, intensidad, etc), o distintos campos de medida para la misma magnitud; así como, distintos tipo de naturaleza de corriente como alterna y continua. 5. REALIZACIÓN PRÁCTICA El primer circuito, es un circuito básico constituido por una lámpara. Se conectará el voltímetro, amperímetro y vatímetro según el esquema de la figura 1.11; y se anotarán las lecturas correspondientes de los aparatos de medida.
Figura 1.11. Esquema eléctrico de un circuito con una lámpara.
A
V
W
L1

Manual de prácticas
18
En los restantes circuitos: b.- circuito con dos lámparas serie; c.- circuito con dos lámparas en paralelo; d.- circuito mixto con dos lámparas en paralelo entre sí y una serie; se procederá al montaje de los mismos según las figuras 1.12, 1.13, 1.14,. y el alumno tratará de conectar los aparatos de medida en dichos circuitos, para conocer las tensiones, intensidades y potencia activa de los mismos. Figura1.12. Esquema eléctrico de un circuito con dos lámparas en serie. Figura 1.13. Esquema eléctrico de un circuito con dos lámparas en paralelo. Figura 1.14. Esquema eléctrico de un circuito con dos lámparas en paralelo y una en serie.
L1 L2
L2 L3
L1
L1
L2
Manual de prácticas
19
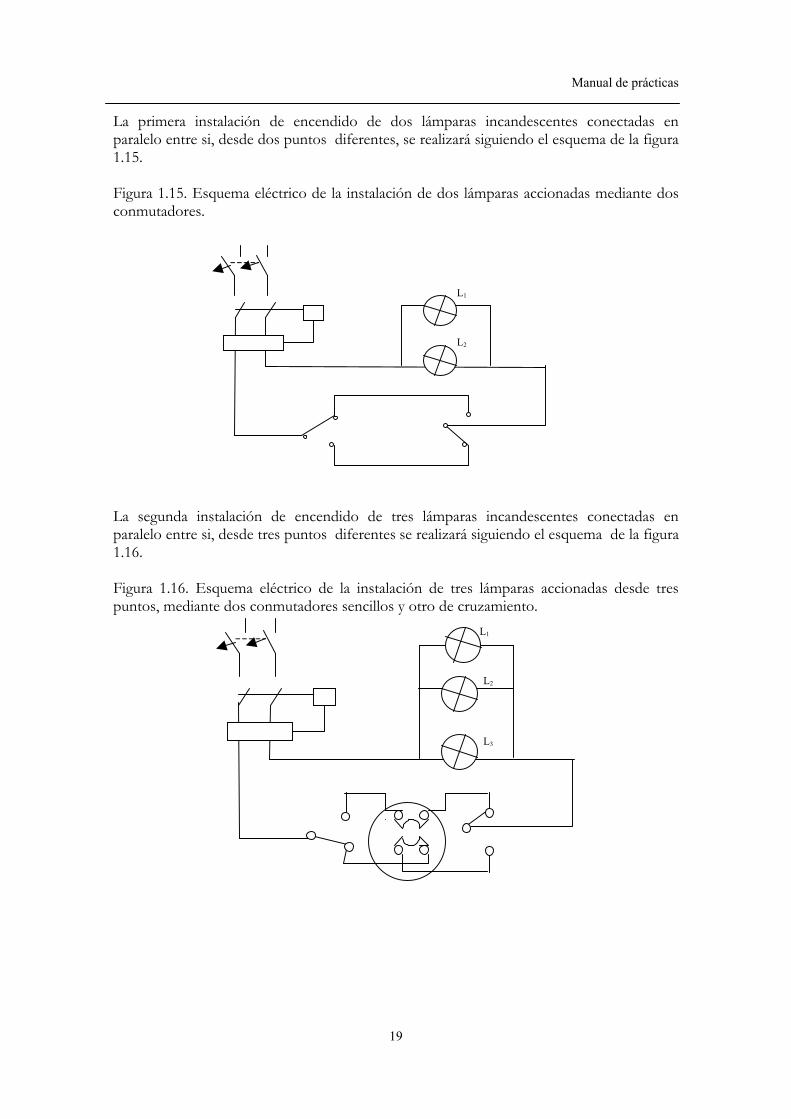
La primera instalación de encendido de dos lámparas incandescentes conectadas en paralelo entre si, desde dos puntos diferentes, se realizará siguiendo el esquema de la figura 1.15. Figura 1.15. Esquema eléctrico de la instalación de dos lámparas accionadas mediante dos conmutadores. La segunda instalación de encendido de tres lámparas incandescentes conectadas en paralelo entre si, desde tres puntos diferentes se realizará siguiendo el esquema de la figura 1.16. Figura 1.16. Esquema eléctrico de la instalación de tres lámparas accionadas desde tres puntos, mediante dos conmutadores sencillos y otro de cruzamiento.
L1
L2
L1
L2
L3

Manual de prácticas
20
6. ACTIVIDADES A REALIZAR POR EL ALUMNO 1º.-Dibujar en los esquemas 1.12, 1.13, 1.14 la colocación de los aparatos de medida que se han utilizado en los circuitos correspondientes. 2º.-¿Qué intensidades están pasando por cada una de las lámparas L1, L2 L3 de los circuitos estudiados? 3º.-¿A qué tensión están sometidas cada una de las lámparas L1, L2 L3 de los circuitos estudiados? 4º.-¿Cuál es el valor de la impedancia en el circuito de la figura 1.11?. 5º.-¿Cuál es el valor de cada impedancia en el circuito de la figura 1.12 y la equivalente del circuito?. ¿Qué potencia activa están consumiendo cada una de ellas? ¿Y la de todo el circuito?. 6º.-¿Cuál es el valor de cada impedancia en el circuito de la figura 1.13 y la equivalente del circuito?. ¿Qué potencia activa están consumiendo cada una de ellas? ¿Y la de todo el circuito?. 7º.-¿Cuál es el valor de cada impedancia en el circuito de la figura 1.14 y la equivalente del circuito?. ¿Qué potencia activa están consumiendo cada una de ellas? ¿Y la de todo el circuito?. 8º.- Conectar un amperímetro, un voltímetro y un vatímetro en cada una de los esquemas para medir la intensidad que pasa por el circuito y la potencia de cada circuito:
¿Qué intensidad está pasando por la lámpara L1 en el circuito correspondiente al esquema 1.15?. ¿Qué intensidad está pasando por la lámpara de L2 en el circuito correspondiente al esquema 1.16?.

Manual de prácticas
21
PRACTICA Nº 2
MAQUINAS ROTATIVAS. FUNCIONAMIENTO COMO GENERADOR.
ALTERNADORES Y DÍNAMOS DE CORRIENTE CONTÍNUA.
1.- FUNDAMENTO DE LOS GENERADORES ROTATIVOS. Energía Mecánica Energía Eléctrica Figura 2.1. Funcionamiento como generador de una máquina eléctrica. Un generador eléctrico transforma la energía mecánica (que recibe en su eje) desde un elemento motor, en energía eléctrica (en bornes de salida), que suministra a una carga o circuito eléctrico de utilización. En los alternadores la forma de esta energía eléctrica es de corriente alterna y en las dinamos se manifiesta en forma de corriente continua. El principio de funcionamiento de estas máquinas, en líneas generales, es el siguiente: Su eje recibe energía mecánica de un elemento que le proporciona este giro; acopladas al mismo se encuentran una serie de espiras en forma de bobinas. Este bloque de bobinas se encuentra solidario al eje y a este conjunto se le denomina rotor. También en el estator se encuentran otra serie de bobinas. A uno de los bobinados se le aplica corriente contínua con lo que se crea un campo magnético, recibiendo entonces el nombre de bobinado inductor. Al girar el otro bobinado en el seno o interior de un campo magnético y sometidas sus bobinas por lo tanto a una variación de flujo, en virtud del principio de inducción electromagnética de Faraday, se induce en ellas una fuerza electromotriz que será proporcional a : -La intensidad del campo magnético. -Velocidad con que se mueve la espira en el interior del campo. -Número de espiras existentes en cada bobina. El valor de la tensión inducida responde a la siguiente expresión:
8i 10vlB10a60
PnNFEM8 −×××=×
××××φ
=−
Siendo: FEM = Tensión máxima inducida en cada bobina en voltios. φi = Flujo magnético en Maxwell N = Número de espiras de cada bobina.
G ~

Manual de prácticas
22
n = Velocidad del motor en r.p.m. P = Número de pares de polos. a = Número de circuitos paralelos del inducido. B = Valor de la inducción en Gauss. l = Longitud del conductor sometido al campo en cm.. v = Velocidad periférica de la espira en cm/s.
Esta f.e.m. inducida aplicada a un circuito exterior da lugar a la circulación de una corriente que, por extensión, también se conoce como corriente inducida El campo magnético puede ser de imán permanente o electromagnético. El primero prácticamente no se usa, salvo en casos muy específicos. El segundo es generado a partir de una corriente continua que se hace pasar por una bobina compuesta por un determinado número de espiras que envuelve a unos elementos de baja reluctancia que reciben el nombre de piezas o masas polares. El conjunto pieza polar y bobina recibe el nombre de polo magnético y su número ha de ser siempre par. La intensidad del campo magnético depende:
- Número de espiras de la bobina. - Intensidad de corriente que se haga pasar por la bobina.
- De la longitud del circuito magnético H = 1,25 N I / L
La inducción magnética depende de la intensidad de campo y del coeficiente de permeabilidad magnética del hierro del circuito magnético Β=µH La corriente que se hace pasar para la generación de este campo recibe el nombre de corriente de excitación. En los alternadores esta corriente es continua y procede de una dínamo colocada en el mismo eje del alternador, que recibe el nombre de excitatriz. En los alternadores el inductor puede estar en el rotor o en el estátor, con lo que el inducido estaría en el estator o en el rotor. En los alternadores de mediana y gran potencia el inductor siempre está en el rotor y se le suele llamar rueda polar. Entonces la f.e.m. se genera en el estátor. Por eso, en éste caso, al rotor se le puede llamar inductor y también circuito primario y al estátor se le puede llamar inducido y también circuito secundario.

Manual de prácticas
23
En las dínamos, el circuito primario o inductor, los polos inductores siempre han de estar en el estátor y el circuito secundario o inducido siempre ha de estar en el rotor. En las dinamos, si la corriente continua de excitación procede de una fuente exterior, la máquina recibe el nombre de dinamo de excitación independiente. Cuando la corriente de excitación proviene de la misma máquina que la genera ésta recibe el nombre de dinamo autoexcitada. Otra forma de obtener el valor de la f.e.m. inducida, sabiendo que depende de la variación de flujo respecto del tiempo, es la siguiente: e = dΦ/d t en valor instantáneo y E = Φ/t = B S / t = B l a/t = B l v siendo E valor máximo de la f.e.m. en voltios B el valor de la inducción en Teslas l la longitud de la masa polar en metros a la anchura de la masa polar o arco polar en metros v la velocidad de la espira en m/s. 2.- APARAMENTA. En esta práctica utilizaremos nuevos dispositivos de los que es necesario tomar conocimiento, como son los convertidores. Genéricamente llamamos convertidores a los dispositivos que aseguran las diversas transformaciones posibles de las características de la energía eléctrica. Dentro de este grupo podemos considerar: a.- Los transformadores y autotransformadores. Permiten la conversión de una corriente alterna de tensión determinada en otra corriente alterna de distinta tensión. El autotransformador.- Es un elemento regulador de tensión, en el que hay una borne de entrada (E), una común para la entrada y salida (C), y otra para la salida (S), que es el eje o cursor. Las tensiones de entrada se aplican entre E y C, obteniéndose la salida entre S y C.(figura 2.2) Figura 2.2. Autotransformador Utilizando los autotransformadores de regulación continua monofásicos y trifásicos, con fuentes de alimentación en corriente alterna, obtendremos las correspondientes fuentes de corriente alterna regulables. Podemos obtener tensiones comprendidas entre el intervalo en el que trabaje dicho autotransformador, dependiendo de las relaciones de transformación. En cada caso las intensidades vienen limitadas por la potencia de los autotransformadores.
E
S C

Manual de prácticas
24
El autransformador trifásico no es más que, una asociación en "tandem" de tres monofásicos. La conexión de estos tres autotransformadores se hace, por regla general, en estrella. b.- Rectificadores.- Son elementos que están formados por asociaciones de diodos, de forma tal que rectifican la corriente alterna, pudiéndola convertir en pulsatoria, continua. Los diodos vienen representados por la siguiente figura.2.3. Figura 2.3. Diodo c.- Onduladores.- Son los convertidores de corriente continua en corriente alterna. Los inversores pueden funcionar indistintamente como rectificadores o como onduladores. Figura 2.4. Ondulador (Inversor) Si al autotransformador que hemos conectado a una fuente de tensión en alterna le añadimos puentes rectificadores obtendremos fuentes de tensión continua pulsatoria cuyo rizado (forma de onda) dependerá del tipo de puente. El conjunto representado en la siguiente figura 2.5, está constituido por un autotransformador trifásico de regulación continua conectado en estrella, y un puente de Graetz trifásico. Si el conjunto lo conectamos a una fuente de alimentación alterna dicho sistema será considerado como una fuente de corriente continua regulable. Figura 2.5. Autotransformador trifásico conectado en estrella y un puente Graetz trifásico Otros elementos a conocer son los variac, reostatos y potenciómetros. Un variac no es más que una bobina con nucleo toroidal de chapa magnética y con un cursor, que permite tomar parte de la tensión producida por autoinducción en la misma. Se trata pues de un autotransformador de regulación continua como los citados en el apartado de fuentes de alimentación.

Manual de prácticas
25
Recibe el nombre de reostato, toda resistencia intercalada en un circuito eléctrico, sea en serie o en derivación, a fin de regular la intensidad o disminuir la tensión. Son resistencias bobinadas sobre núcleos toroidales aislantes (de porcelana) con un cursor que permite modificar la resistencia del mismo, y con ello las condiciones de carga del circuito. Figura 2.6. Reostato Si se conecta el cursor con uno los extremos de la resistencia el montaje se denomina potenciómetro. Por lo tanto con el montaje en potenciómetro de una resistencia, se obtiene una tensión variable desde el valor de alimentación hasta cero. Figura 2.7. Potenciómetro En los reostatos hay que cuidar que no se supere la intensidad máxima admisible, ya que se puede quemar. 3.- OBJETIVOS. En esta práctica se pretende estudiar el funcionamiento de cuatro tipos de generadores de corriente continua (dinamos). Uno de excitación independiente y tres de autoexcitación. En todos los casos se estudiará su funcionamiento tanto en vacío como en carga. Dependiendo de que la corriente generada en la máquina se haga pasar toda o parte de la misma por las bobinas productoras del campo magnético las dínamos autoexcitadas se clasifican:
Dínamos de excitación serie. Dínamos de excitación shunt o paralelo. Dínamos de excitación serie-paralelo (compound).
El campo magnético y todos los elementos que intervienen en su generación reciben el nombre de inductor de la máquina. El elemento que se encuentra en el interior de la acción
F.A.
F.A.

Manual de prácticas
26
de este campo magnético, y donde se inducirá una determinada tensión recibe el nombre de inducido. Los símbolos tanto para el inducido como para el inductor se muestran en la figura 2.8. Figura 2.8. a.-inducido b.-inductor Cuando giran las espiras movidas por el eje de la máquina, éstas cortan las líneas de fuerza en dos sentidos: Las de un lado del eje las cortarán hacia arriba, mientras que las del otro lado las cortarán hacia abajo. Esto significa que, según la ley de Lenz, la tensión inducida en cada parte de la espira tendrá polaridad distinta, determinada por la regla de la mano derecha. Durante cada media vuelta un extremo será positivo y el otro negativo, y en la otra media vuelta las polaridades serán distintas. Luego, la tensión inducida será alterna y en forma senoidal, puesto que la cantidad de líneas cortadas por las espiras o bobinas responde a la función seno.
Figura 2.9. Esquema de dinamo elemental con tres espiras y curvas de tensión originadas en el inducido
G

Manual de prácticas
27
Todas las dínamos disponen de un elemento que recibe el nombre de colector y un número par de escobillas que tiene como misión transformar la corriente generada alterna en corriente continua (rectificarla), según se observa en la figura 2.9. El colector está formado por un número de delgas siempre par ya que cada terminal de las bobinas del inducido acaba en una de éstas. Las delgas se encuentran aisladas entre si por baquelita, mica o cualquier otro aislante de acuerdo con las tensiones máximas inducidas. Caja o placa de bornes.- No hay una norma oficial en España sobre la normalización de bornes en máquinas de corriente continua, aunque desde hace bastantes años viene prevaleciendo la designación propuesta por las normas DIN, que es la que utilizaremos. Al abrir la caja de bornes de una máquina de c.c. o en la misma tapa se observará que cada borne se encuentra señalada por una letra. Sabiendo el significado de cada letra, se puede conocer de inmediato a qué clase de máquina corresponde. A continuación se especifica el significado de cada letra:
- A y B : Bobina del inducido. - C y D : Bobina del inductor en paralelo o shunt.
- E y F : Bobinado inductor serie. - G y H : Bobinado correspondiente a polos auxiliares o de conmutación. - J y K : Bobinado inductor de excitación independiente.
Manual de prácticas
28
A.-EXCITACION INDEPENDIENTE
A.1. MATERIAL El material que se utilizará en esta parte de la práctica será fundamentalmente:
Dinamo de excitación independiente. Un motor universal para accionar el eje de la dinamo. Corriente continua, para la cual se obtendrá a partir de corriente alterna, con un rectificador. Autotransformador Para estudiar las dinamos autoexcitadas en carga utilizaremos un reostato con una graduación de 0-100 partes. Aparatos de medida: voltímetros, amperímetros, tacómetros.
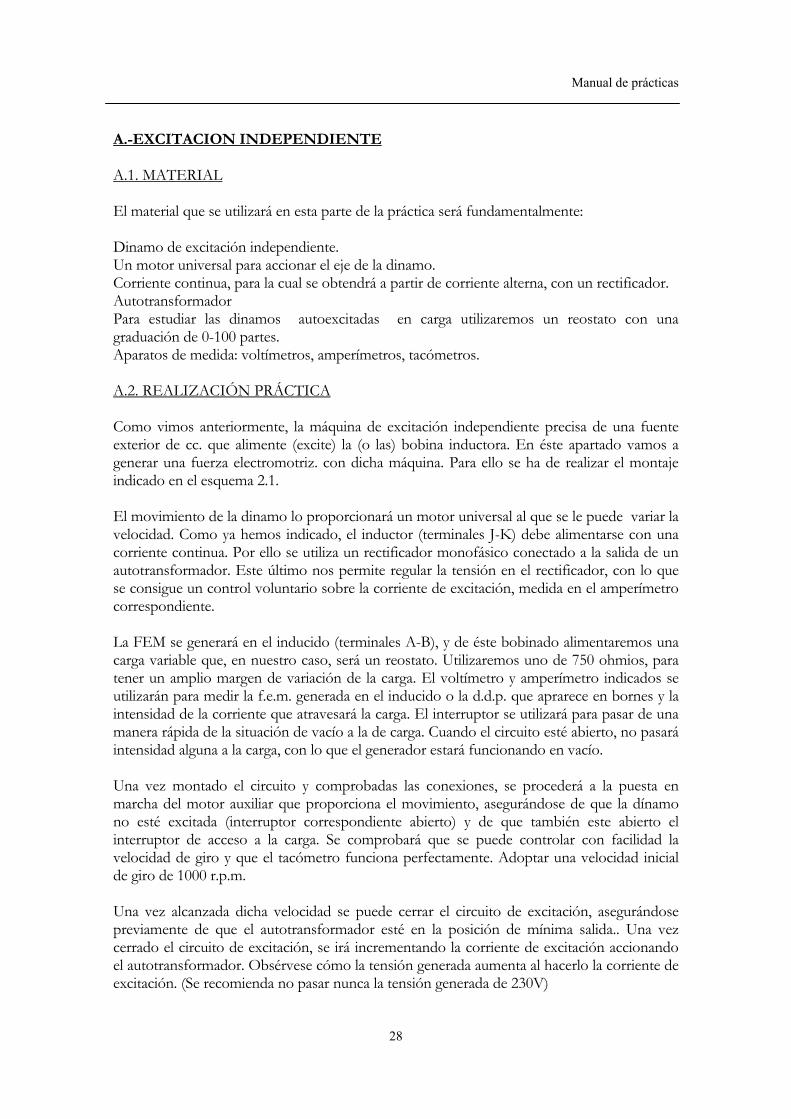
A.2. REALIZACIÓN PRÁCTICA Como vimos anteriormente, la máquina de excitación independiente precisa de una fuente exterior de cc. que alimente (excite) la (o las) bobina inductora. En éste apartado vamos a generar una fuerza electromotriz. con dicha máquina. Para ello se ha de realizar el montaje indicado en el esquema 2.1. El movimiento de la dinamo lo proporcionará un motor universal al que se le puede variar la velocidad. Como ya hemos indicado, el inductor (terminales J-K) debe alimentarse con una corriente continua. Por ello se utiliza un rectificador monofásico conectado a la salida de un autotransformador. Este último nos permite regular la tensión en el rectificador, con lo que se consigue un control voluntario sobre la corriente de excitación, medida en el amperímetro correspondiente. La FEM se generará en el inducido (terminales A-B), y de éste bobinado alimentaremos una carga variable que, en nuestro caso, será un reostato. Utilizaremos uno de 750 ohmios, para tener un amplio margen de variación de la carga. El voltímetro y amperímetro indicados se utilizarán para medir la f.e.m. generada en el inducido o la d.d.p. que aprarece en bornes y la intensidad de la corriente que atravesará la carga. El interruptor se utilizará para pasar de una manera rápida de la situación de vacío a la de carga. Cuando el circuito esté abierto, no pasará intensidad alguna a la carga, con lo que el generador estará funcionando en vacío. Una vez montado el circuito y comprobadas las conexiones, se procederá a la puesta en marcha del motor auxiliar que proporciona el movimiento, asegurándose de que la dínamo no esté excitada (interruptor correspondiente abierto) y de que también este abierto el interruptor de acceso a la carga. Se comprobará que se puede controlar con facilidad la velocidad de giro y que el tacómetro funciona perfectamente. Adoptar una velocidad inicial de giro de 1000 r.p.m.
Una vez alcanzada dicha velocidad se puede cerrar el circuito de excitación, asegurándose previamente de que el autotransformador esté en la posición de mínima salida.. Una vez cerrado el circuito de excitación, se irá incrementando la corriente de excitación accionando el autotransformador. Obsérvese cómo la tensión generada aumenta al hacerlo la corriente de excitación. (Se recomienda no pasar nunca la tensión generada de 230V)

Manual de prácticas
29
ESQUEMA 2. 1. ESQUEMA ELÉCTRICO DE LA DINAMO DE EXCITACIÓN INDEPENDIENTE
Manual de prácticas
30
A.3. ACTIVIDADES A REALIZAR POR EL ALUMNO
a.- Ensayo en vacío
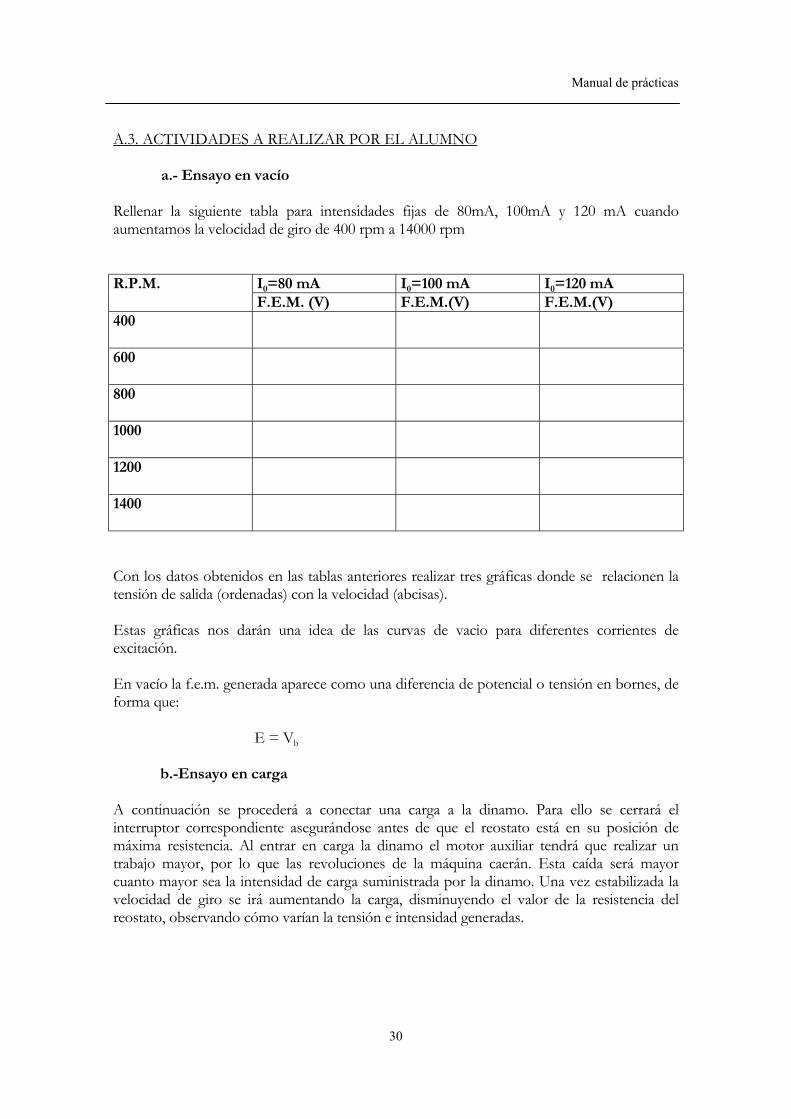
Rellenar la siguiente tabla para intensidades fijas de 80mA, 100mA y 120 mA cuando aumentamos la velocidad de giro de 400 rpm a 14000 rpm
I0=80 mA I0=100 mA I0=120 mA R.P.M. F.E.M. (V) F.E.M.(V) F.E.M.(V)
400
600
800
1000
1200
1400
Con los datos obtenidos en las tablas anteriores realizar tres gráficas donde se relacionen la tensión de salida (ordenadas) con la velocidad (abcisas). Estas gráficas nos darán una idea de las curvas de vacio para diferentes corrientes de excitación. En vacío la f.e.m. generada aparece como una diferencia de potencial o tensión en bornes, de forma que: E = Vb b.-Ensayo en carga A continuación se procederá a conectar una carga a la dinamo. Para ello se cerrará el interruptor correspondiente asegurándose antes de que el reostato está en su posición de máxima resistencia. Al entrar en carga la dinamo el motor auxiliar tendrá que realizar un trabajo mayor, por lo que las revoluciones de la máquina caerán. Esta caída será mayor cuanto mayor sea la intensidad de carga suministrada por la dinamo. Una vez estabilizada la velocidad de giro se irá aumentando la carga, disminuyendo el valor de la resistencia del reostato, observando cómo varían la tensión e intensidad generadas.

Manual de prácticas
31
En carga la f.e.m. generada será la misma que en vacío, pero al circular una corriente de intensidad I, siendo r la resistencia interior de la dínamo, se produce una caída de tensión interior en la dinamo y aparece una diferencia de potencial o tensión en bornes, de valor:: E – r I = Vb Rellénese la siguiente tabla. Para ello debe mantenerse constante la corriente de excitación. Elegimos una intensidad de excitación de 100mA. La velocidad de giro debe ser también constante, eligiéndose una velocidad entre 1000 y 2000 rpm. Se irán tomando los datos de tensión e intensidad generadas para diferentes valores de la resistencia de carga. Como ésta tiene una graduación de 100 partes, se realizarán 10 medidas, tomando de 10 en 10 el aumento de la resistencia de carga. VELOCIDAD DE GIRO: 1000 rpm
INTENSIDAD DE EXCITACIÓN: 100 mA Posición reostato (%) Tensión de salida (V) Intensidad de carga (A) Resistencia ( Ω ) 100
90
80
70
60
50
40
30
20
Con los datos obtenidos en la tabla se confeccionará un gráfico de tensión/intensidad de generación. Realícese la misma tabla pero con una velocidad de giro superior, confeccionando igualmente la misma gráfica. Comprobar con las gráficas en la mano que los datos obtenidos en la práctica se corresponden con lo estudiado en la teoría, fundamentalmente que al aumentar la intensidad de carga disminuye la tensión generada.

Manual de prácticas
32
B.-DINAMOS AUTOEXCITADAS. B.1. INTRODUCCIÓN En este apartado de la práctica vamos a estudiar las dínamos autoexcitadas, que son aquellas que no precisan una corriente externa de excitación. A continuación se describirá brevemente cada uno de los tres tipos de dinamos de autoexcitación con los que vamos a trabajar DINAMO SERIE En este caso, como toda la corriente pasa por las bobinas del campo, suele tener pocas espiras y de hilo grueso con el fin de ofrecer poca resistencia a la corriente de carga. Trabajan en la parte de tensión constante para suministrar una corriente constante. En el esquema 2.2. tenemos su representación. Esquema 2.2. Dinamo autoexcitación serie DINAMO SHUNT. El campo de esta dínamo consta de muchas espiras y de hilo fino, con el fin de emplear poca corriente para conseguir el campo necesario, y se encuentra conectado a la salida del inducido. La tensión de salida disminuye al aumentar la carga. En el esquema 2.3 tenemos su representación. Esquema 2.3. Dinamo autoexcitación paralelo
G
V
A B
A
A
C D
A
G
V
A B E
Manual de prácticas
33
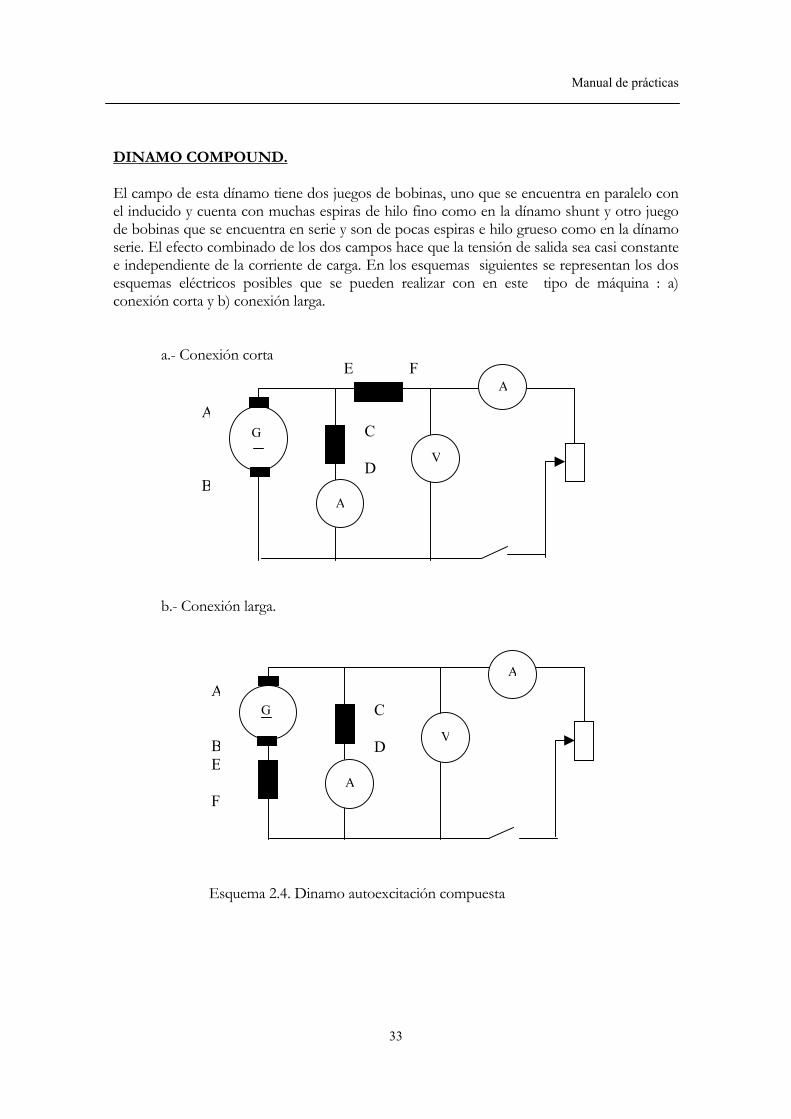
DINAMO COMPOUND. El campo de esta dínamo tiene dos juegos de bobinas, uno que se encuentra en paralelo con el inducido y cuenta con muchas espiras de hilo fino como en la dínamo shunt y otro juego de bobinas que se encuentra en serie y son de pocas espiras e hilo grueso como en la dínamo serie. El efecto combinado de los dos campos hace que la tensión de salida sea casi constante e independiente de la corriente de carga. En los esquemas siguientes se representan los dos esquemas eléctricos posibles que se pueden realizar con en este tipo de máquina : a) conexión corta y b) conexión larga.
a.- Conexión corta
b.- Conexión larga.
Esquema 2.4. Dinamo autoexcitación compuesta
G
V
A BE F
A
A
C D
G
V
A B
A
A
C D
E F

Manual de prácticas
34
CEBADO DE LAS DINAMOS DE AUTOEXCITACIÓN La corriente de excitación la suministra la propia máquina, tomando parte de la generada. Sin embargo, al comenzar el movimiento, no hay corriente de excitación ya que la máquina estaba en reposo, y al no haber corriente de excitación no se generará nada. Esto puede parecer un círculo vicioso, pero la realidad es bien distinta: En los polos inductores (donde se alojan los devanados inductores) queda un magnetismo residual que proviene de anteriores operaciones con la máquina. Con este pequeño magnetismo, que sustituye momentáneamente al campo magnético que deben crear las bobinas inductoras, se comenzará a inducir tensión en el bobinado inducido, con lo que ya se puede tomar corriente para los bobinados inductores. Este proceso inicial recibe el nombre de CEBADO. Veamos qué casos se pueden presentar:
a) El magnetismo residual de los polos inductores procedente de operaciones previas de la máquina tiene la polaridad indicada en la figura. La pequeña FEM generada en el inducido estará dirigida de tal forma que su corriente anula el magnetismo residual anulándose la FEM. En este caso la máquina no se ceba.
b) Se han invertido los terminales del inductor. La FEM generada en el inducido refuerza el magnetismo remanente incrementando la FEM. Existe un valor crítico de la resistencia del inductor por encima del cual no es posible el cebado de la máquina. Es preciso que la recta. V = Rf x If corte a la característica en vacío de la máquina. Rf = Rb es el valor crítico. Para cada velocidad se modifica la característica en vacío y también la resistencia crítica del inductor.
V
If
Ra
Rb Rc

Manual de prácticas
35
c) Se ha invertido el sentido de giro. También es posible el cebado de la máquina.
d) Aplicando una tensión continua exterior se ha invertido el signo del campo
residual.
Las razones que impiden el cebado de una máquina son por tanto: - Carencia del magnetismo remanente. - Inversión de los terminales del devanado inductor. - Excesiva resistencia en el circuito inductor debido a:
* Circuito abierto. * Valor excesivo del reostato exterior. * Contacto defectuoso en las escobillas. * Colector sucio o grasiento.
B.2. MATERIAL En esta parte de la práctica vamos a estudiar los tres tipos fundamentales de dínamos autoexcitadas: Excitación serie, shunt y compound. Para ello disponemos de una máquina con tres bobinados: El inducido y dos inductores, uno para conectar en serie y el otro en paralelo. Los esquemas de conexión para los diferentes tipos se tienen en las páginas anteriores esquemas 4.2, 4.3, 4.4). Como en el caso anterior el movimiento del eje nos lo proporciona un motor universal con un sistema de fácil de elección de velocidad. Para estudiar las dinamos autoexcitadas en carga, utilizaremos un reostato con una graduación de 0-100 partes. Aparatos de medida: voltímetros, amperímetros, tacómetros. B.3. REALIZACIÓN PRÁCTICA Realizar el montaje y conexionado del tipo de excitación elegida de acuerdo con los esquemas correspondientes, esquema 4.2 (dinamo de autoexcitación serie), esquema 4.3 (dinamo de autoexcitación paralelo) y esquema 4.4 (dinamo de autoexcitación compuesta). Una vez comprobadas las conexiones se procederá a poner en funcionamiento el motor auxiliar, asegurándose antes de que la dínamo esté en vacío (interruptor abierto). Regular la velocidad de tal manera que nunca se generen más de 250 v. Si no se genera tensión alguna puede ser que la máquina no se haya cebado. Comprobar por tanto este supuesto y obrar en consecuencia.

Manual de prácticas
36
B.4. ACTIVIDADES A REALIZAR POR EL ALUMNO
a.- Ensayo en vacío
Una vez comprobado que se genera tensión se procederá a confeccionar la curva de vacío, por lo que iremos anotando las tensiones generadas para diferentes velocidades de giro. Repitiendo las medidas para cada tipo de dinamo de autoexcitación Se anotarán los valores en la siguiente tabla.
Din. serie Din. Paralelo Din. Compuesta R.P.M. F.E.M. (V) F.E.M. (V) F.E.M. (V)
400
600
800
1000
1200
1400
Con los datos obtenidos en la tabla anterior dibujar las curvas de vacío para cada tipo de dinamo de autoexcitación (Tensión/velocidad).
a.-Ensayo en carga
A continuación se estudiará el comportamiento de las dinamos de autoexcitación serie, paralela y compuesta en carga. Para ello se procederá a cerrar el interruptor correspondiente, asegurándose antes de que el reostato de carga se encuentra en su posición de máxima resistencia. Una vez puesto el circuito en carga se tomarán datos para realizar las curvas características de funcionamiento en carga para cada una de las dinamos de autoexcitación estudiadas. Para ello se tomarán datos de la tensión y corriente generadas para diferentes valores de la resistencia de carga. Como ésta tiene una graduación de 100 unidades, se incrementará la resistencia de 10 en 10 unidades, confeccionando una tabla similar a la segunda tabla como la siguiente para cada tipo de dinamo de autoexcitación. Por supuesto, en la confección de esta tabla la velocidad de giro debe ser en todo momento la misma. Elíjase un valor entre 750 y 1000 rpm.

Manual de prácticas
37
VELOCIDAD DE GIRO: 1000 rpm
DINAMO AUTOEXCITACIÓN SERIE Posición reostato (%) Tensión de salida (V) Intensidad de carga (A) Resistencia ( Ω ) 100
90
80
70
60
50
40
30
20
VELOCIDAD DE GIRO: 1000 rpm
DINAMO AUTOEXCITACIÓN PARALELO(SHUNT) Posición reostato (%) Tensión de salida (V) Intensidad de carga (A) Resistencia ( Ω ) 100
90
80
70
60
50
40
30
20

Manual de prácticas
38
VELOCIDAD DE GIRO: 1000 rpm
DINAMO AUTOEXCITACIÓN COMPUESTA(COMPOUND) Posición reostato (%) Tensión de salida (V) Intensidad de carga (A) Resistencia ( Ω ) 100
90
80
70
60
50
40
30
20
Con los datos obtenidos en la tabla anterior, dibujar la característica de la dínamo en carga (tensión/intensidad). Realícense los dos pasos anteriores con una velocidad de giro diferente, con el objeto de comparar las gráficas en carga para diferentes regímenes de giro. Observando estas gráficas se podrá comprobar las características de las dínamos y comprobar que se cumple lo que se estudió en la teoría. Para concluir la práctica, el alumno deberá realizar un comentario sobre las cuatro máquinas estudiadas en el que verterá las conclusiones que haya obtenido a la vista del desarrollo de la práctica. Así mismo comentará los datos obtenidos en las diferentes tablas así como en las gráficas. Para terminar comentará las cuatro máquinas en conjunto y explicará las ventajas e inconvenientes de cada una de ellas.

Manual de prácticas
39
PRACTICA 3.
MAQUINAS ROTATIVAS.FUNCIONAMIENTO COMO MOTOR.
MOTOR TRIFÁSICO DE INDUCCIÓN
1.- OBJETIVOS En esta práctica vamos a estudiar el motor trifásico de inducción por ser uno de los motores más utilizados en la actualidad, aunque se dará en primer lugar algunas consideraciones de otro tipo de motor utilizado también en bastantes ocasiones como es el motor universal. Concreatamente en el motor trifásico se pretende:
Estudiar las conexiones estrella triángulo. Ver lo que ocurre en el momento de arranque del motor. Cambiar el sentido de giro del motor.
Dibujar esquemas elementales.
Para ello se hace necesario utilizar nuevos dispositivos de los que se hace necesario tomar conocimiento, por lo que debemos examinar la siguiente aparamenta. 2.- APARAMENTA. Nos referimos aquí a la aparamenta que nos permitirá aplicar o interrumpir las magnitudes eléctricas en juego, como pueden ser, además de los interruptores y conmutadores, ya conocidos, los pulsadores, contactores y relés, así como los relés térmicos y los guardamotores: Pulsadores.- Son mecanismos destinados a abrir o cerrar circuitos, normalmente de maniobra, solamente durante el tiempo que se mantienen presionados. Están constituidos por un botón aislante solidario con uno o varios contactos que se mantienen en una determinada posición (abiertos o cerrados) gracias a un resorte antagonista que, al ser presionado, cede y origina la inversión de los contactos. Figura 3.1. Pulsador

Manual de prácticas
40
Contactores y relés. Son interruptores gobernados a distancia por la actuación de una bobina que acciona un núcleo de hierro (electroimán) al que van solidariamente unidos, mecánicamente, dos tipos de contactos. Los contactos principales o de fuerza, que estarán en el circuito de potencia o de fuerza motriz y los contactos auxiliares o de maniobra, que estarán en el circuito de maniobra, mando y control, con funciones de mando, control, protección, enclavamiento, etc. La bobina hace pasar a los contactos de su posición de reposo a la de trabajo cuando se le aplica la tensión correspondiente, es decir, cuando se cierra el circuito de la bobina. Los contactos de fuerza, en reposo, siempre estarán abiertos, mientras que de los de maniobra, siempre habrá en reposo, al menos, dos normalmente abiertos y dos normalmente cerrados. Contactores que no conectan potencia y por ello no disponen de contactos de fuerza, se denominan "contactores auxiliares" o relés y sirven exclusivamente para funciones de mando, control y enclavamiento. A veces derivan en relés de tiempo, relés de protección, etc. En la figura se representa el esquema del contactor que va a utilizarse en las prácticas, con intensidad de empleo de cargas no inductivas de 10 A., y con una potencia admisible de 2'2 KW ó 3 CV. Los terminales numerados 1-2, 3-4 y 5-6 corresponden a los contactos principales, los numerados 9-10 y 11-12 a los contactos auxiliares y los terminales A-B corresponden a la bobina.. Cuando a la bobina se le aplica tensión todos los contactos pasan de su posición de reposo a la de trabajo. Para cerrar el circuito de mando pueden emplearse alguno de los métodos comentados anteriormente. Es interesante en los esquemas representar aparte el circuito de mando, con lo que se consigue simplificar el diagrama, no entrecruzando líneas de los circuitos de potencia y mando. Al lado de cada dispositivo se señala la denominación del órgano al que pertenece (Figura 3.2).
Figura 3.2 Representación de un contactor.

Manual de prácticas
41
(a) (b) (c) Figura 3. 3. Esquema de un contactor (a); contactor unido a un relé térmico (b) (conjunto guardamotor) y (c) relé. Veamos ahora, sobre esquemas, algunos conceptos que se manejarán más tarde en la técnica de control, regulación y mando. Se denomina contacto de retención a un contacto normalmente abierto que se conecta en paralelo con el pulsador de arranque (figura 3.4), A, Como su función es la de seguir alimentando (reteniendo) a la bobina del contactor, cuando deja de accionarse el pulsador, también se le conoce como contacto de realimentación. Obsérvese que en la representación del esquema de mando se prescinde de los contactos principales. Con ello conseguimos separar el circuito principal (o de fuerza) del circuito de mando, lo que da mayor claridad al esquema. Nótese también que conectamos el extremo "a" de la bobina (que no se une a elementos de mando) al neutro. De esta forma no quedará bajo tensión cuando el circuito de mando esté abierto y se evitarán así, tanto derivaciones en caso de fallo de aislamiento, como accidentes, además de alargar la vida de la bobina.
Figura 3.4. Esquema de un contacto de retención.

Manual de prácticas
42
En la figura 3.5, podemos ver esquema de conexión en "bloqueo mutuo". Consiste en poner en serie con la bobina de un contactor, un contacto normalmente cerrado del otro. Así, si un contactor se activa su contacto normalmente cerrado se abre, antes de cerrarse su contacto normalmente abierto, impidiendo la activación del otro contactor y el funcionamiento simultáneo de dos contactores que nunca debería poder producirse . Un caso práctico se produce cuando se arranca un motor trifásico en estrella triángulo, donde hay que asegurarse de que los contactores correspondientes no estén activados simultáneamente, porque se produciría un cortocircuito en la red. Igual ocurre en el caso de la inversión del sentido de giro de un motor.
Figura 3.5. Esquema de bloqueo mutuo. Guardamotor. El guardamotor se utiliza para la protección del motor contra sobrecargas. Está constituido por el acoplamiento de un contactor y de un relé térmico de protección. Este relé tiene dos partes fundamentales: a) Láminas bimetálicas como elementos de dilatación por intensidad/temperatura. b) Mecanismo de desconexión o de disparo. Las láminas bimetálicas se calientan al paso de la corriente del motor, de tal manera que cuando alcanzan su temperatura de reacción se dilatan y disparan el mecanismo de desconexión. La lámina está formada por dos metales de distinto coeficiente de dilatación. La figura 3.6 representa la acción de las tres láminas bimetálicas (una por cada fase) sobre la reglilla móvil, de tal manera que cuando se alcanza la intensidad límite del relé las láminas desplazan la reglilla móvil y ésta a su vez hace abrir el contacto conmutado de la posición 4, en serie con la bobina del contactor, desconectándolo y además si se pasa a la posición 30, puede conectar una lámpara de señalización u otra alarma o automatismo cualquiera, como ordenar el arranque de otro motor, etc.. Cada relé tiene una gama de regulación para la intensidad. Una vez establecido el valor límite de la corriente de regulación, se disparará en un tiempo que dependerá del valor de la intensidad que pase por él. En la siguiente figura se dan curvas características de disparo de los relés térmicos utilizados en las prácticas, siendo I la curva correspondiente a las láminas frías y II a las láminas calientes.

Manual de prácticas
43
Figura 3.6. Relé térmico. Como puede observarse, en la figura 3.7 cuando la intensidad que circula es el doble del valor de regulación del relé, éste se dispara a los 60 segundos si están las láminas frías, y a los 40 segundos si están calientes.
Figura 3.7. Curvas de disparo de un relé térmico. El relé térmico protege al motor de una sobrecarga más o menos prolongada y para su actuación requiere de un tiempo. Son relés de tiempo inverso, que quiere decir que a mayor sobrecarga, menor tiempo de respuesta. Por tanto no se produce una desconexión instantánea, lo que indica que este relé no protege al motor de un cortocircuito que provoca una intensidad instantánea muy elevada y que precisa una desconexión también instantánea. La protección de un motor contra un cortocircuito debe hacerse utilizando fusibles en las tres fases que alimentan al motor, del tipo aM. Se pueden sustituir a los fusibles por un interruptor magnetotérmico, también de acción instantánea.

Manual de prácticas
44
En la figura 3.8 se muestra el esquema eléctrico del relé térmico, donde las láminas bimetálicas están intercaladas en la línea que alimenta el motor o circuito de fuerza motriz o principal, conectándose a éste por las bornas U, V y W. El contactoauxiliar 3-4 se conecta en serie con la bobina del contactor 3 u v w 4 30 Figura 3.8. Esquema eléctrico de un relé térmico. Fasímetro. Es un aparato destinado a medir el factor de potencia de una instalación. La figura 3.9. representa el esquema eléctrico con las bornas de conexión correspondientes. Figura 3.9. Esquema eléctrico de un fasímetro Temporizador. Es un relé de tiempo que permite desconectar un circuito y/o conectar otro, cuando ha transcurrido un tiempo determinado desde su puesta en funcionamiento. Cuando la bobina se pone en tensión comienza a contar el tiempo, de tal manera que cuando transcurre el tiempo regulado previamente el interruptor pasa de la posición 3 a la 2. 1 A 2 3 B Figura 3.10. Esquema eléctrico de un temporizador
Cos ϕ
Manual de prácticas
45
3.- INTRODUCCIÓN Motor universal. El motor universal es fundamentalmente una máquina de c.c. serie. Como sabemos, toda máquina de corriente continua lleva un elemento rectificador que recibe el nombre de colector. Hay que aclarar que algunas máquinas de corriente alterna también disponen de colector, con el fin de participar de las ventajosas características de regulación que presentan las máquinas de corriente continua. Pensemos en cómo trabajan ciertas máquinas herramientas y electrodomésticos, por ejemplo, un taladro. La potencia de corte de la broca mayor que acepta es
nDPmáx ××Π=
Siendo: Pmáx: potencia de corte máxima. D: diámetro broca. N: velocidad de corte. Cuando pongamos otra broca menor, la velocidad de corte será superior. Resulta pues, que con una máquina serie en una de estas herramientas no tenemos necesidad de regular la velocidad, ya que ella sola se autoregula. Luego, tanto en tracción como pequeñas máquinas de la industria y el hogar, pulidoras, taladros, molinillos, ventiladores, máquinas de afeitar, etc., el motor serie presenta más ventajas que inconvenientes. Sin embargo, en tracción con largas distancias se tiene el grave inconveniente de transporte de potencia en corriente continua. que, como se sabe, no es rentable, prefiriéndose el transporte en corriente alterna. y su posterior rectificación. Pero hace algún tiempo esto no era posible, por lo que los ferrocarriles utilizaron y utilizan, aun hoy, máquinas de corriente alterna. con colector de inducido en serie. En el caso particular del motor monofásico con colector se obtiene el motor universal, llamado así porque puede utilizarse con corriente alterna. o corriente continua. Motor trifásico de inducción.
Este tipo de motor es el más utilizado en la industria por su sencillez constructiva, su gran eficacia y su fácil mantenimiento. El principio de funcionamiento de estos motores, es el principio de inducción electromagnética, en virtud del cual al aplicar o alimentar, por un sistema trifásico de corrientes alternas sinusoidales de baja frecuencia, a tres bobinas situadas en el estator y desfasadas 120° eléctricos, se crea un campo magnético giratorio en el circuito magnético de la máquina. Este campo magnético giratorio induce fuerzas electromotrices en los conductores del rotor, constituido por barras conductoras y dos aros (aluminio o cobre) en forma de jaula, que al estar en cortocircuito dan lugar a la circulación de corrientes de cortocircuito en dicho rotor, (ver figura) las cuales a su vez originan un par que trata de oponerse a la causa que lo produce (ley de Lenz), haciendo girar al rotor con una velocidad muy próxima a la del campo magnético creado por el estator.

Manual de prácticas
46
Figura 3.11. Esquema de motor asíncrono
Designando por n la velocidad del rotor, ns a la del campo giratorio (velocidad de sincronismo) y por s el deslizamiento de la máquina que es la diferencia porcentual entre ambas, se tiene:
fpn
nnns
s
s
××
−=−
=60
1
donde: p es el número de pares de polos de la máquina
f es la frecuencia de la red.
Cuando el deslizamiento varía también el consumo varía. Por ejemplo, para una máquina de 4 polos que, conectada a una red de 50 Hz, girase a 1450 rpm. se tendría un deslizamiento del 3'333 % . Si cargamos la máquina el deslizamiento aumenta, el campo al que está sometido el rotor aumenta, la fuerza electromotor generada en el rotor aumenta, la corriente inducida aumenta y el consumo aumenta. En el arranque el deslizamiento vale 1, el consumo es fuerte y de ahí que las compañías puedan exigir y a los particulares puedan interesar sistemas especiales para arrancar estos motores con carga a partir de ciertas potencias. Estos sistemas consistirán en actuar sobre el circuito del estator, reduciendo la tensión de alimentación en el arranque. Ello se puede conseguir con el arranque en estrella/triángulo, con el arranque por autotransformador o con el arranque por resistencias. Si la máquina, arrastrada por una causa externa, superase la velocidad de sincronismo, obtendríamos un deslizamiento negativo y, como consecuencia, se produciría un funcionamiento como generador (hipersincronismo). Esta circunstancia se aprovecha en las grúas como servicio de frenado. Sin embargo, el uso casi exclusivo de estas máquinas es como motor: deslizamiento positivo (s>0) y así vamos a considerarlo en esta práctica.
U V W
Z X Y
Manual de prácticas
47
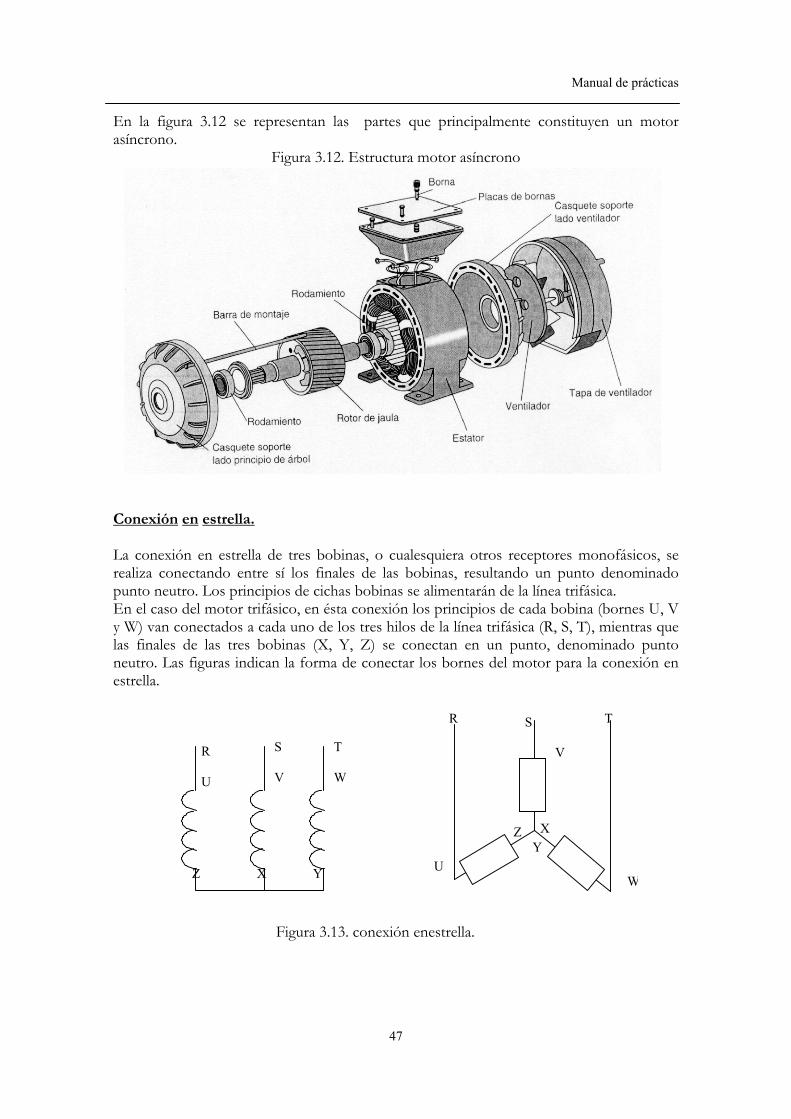
En la figura 3.12 se representan las partes que principalmente constituyen un motor asíncrono.
Figura 3.12. Estructura motor asíncrono
Conexión en estrella. La conexión en estrella de tres bobinas, o cualesquiera otros receptores monofásicos, se realiza conectando entre sí los finales de las bobinas, resultando un punto denominado punto neutro. Los principios de cichas bobinas se alimentarán de la línea trifásica. En el caso del motor trifásico, en ésta conexión los principios de cada bobina (bornes U, V y W) van conectados a cada uno de los tres hilos de la línea trifásica (R, S, T), mientras que las finales de las tres bobinas (X, Y, Z) se conectan en un punto, denominado punto neutro. Las figuras indican la forma de conectar los bornes del motor para la conexión en estrella. Figura 3.13. conexión enestrella.
Z X Y
R U
S V
T W
V
U W
Z X Y
R S T

Manual de prácticas
48
Conexión en triángulo. La conexión en triángulo de tres bobinas, o cualesquiera otros receptores monofásicos, se realiza uniendo el principio de cada bobina con el final de la bobina siguiente. En el caso del motor trifásico, en ésta conexión, cada bobina debe estar conectada a la tensión de la línea, por lo tanto, el principio de cada bobina ( U, V y W ) estará conectado a una fase ( R, S y T ) quedando todas las bobinas sometidas a la tensión de línea o compuesta. Las figuras siguientes muestran la forma de conexión en triángulo. Figura 3.14. conexión entriángulo. Conexión del motor trifásico en estrella y triángulo. Conexionado de protección. Los motores trifásicos de jaula se fabrican para dos tensiones, por ejemplo 220/380 V. Esto quiere decir que la potencia del motor y su par de arranque nominales están calculados para la tensión más alta cuando se conecta en estrella y para la más baja cuando se hace en triángulo. La más frecuente es 380/660 V. y cada vez más, en instalaciones aisladas, como p.e. una EDAR, los motores serán para una sola tensión y arranque directo. Así pues, la placa de bornas de estos motores dispone tanto de los principios como de los finales de cada bobinado, estando internacionalmente normalizadas sus designaciones, así como su situación. Los principios se designan por U, V y W, mientras que los respectivos finales por X, Y y Z. Obsérvese que, en la figura 3.15 en las placas de bornas se desplaza la borna final X a la segunda posición para facilitar la conexión en triángulo mediante puentes verticales. La conexión en estrella se hace mediante puentes horizontales en los finales de las bobinas según se puede observar. a) b)
Figura 3.15. Conexión de un motor trifásico en a) estrella y b) triángulo
U V W
Z X Y
U V W
Z X Y
R U
S V
T W
Z X Y
V
U
WZ
X
Y
R S T

Manual de prácticas
49
Arranque directo e inversión de giro del motor trifásico. Para invertir el sentido de la marcha en estos motores basta con cambiar el orden de dos fases a la entrada del motor. Así, si R, S y T tienen una secuencia que unidas a U, V y W hacen girar en sentido horario al motor (figura3.16), las combinaciones S, R y T o R, T y S lo harán girar en sentido antihorario (figura 3.17). Figura 3.16. Motor trifásico funcionando en estrella en sentido horario Figura 3.17. Motor trifásico funcionando en estrella en sentidoantihorario Cuando el mando de uno de estos motores es automático hay que tener presente el orden de sucesión de fases para no producir averías y situar los contactores de inversión delante de los de arranque estrella-triángulo. Por otra parte, la elevada intensidad de arranque consumida por estos motores hace que sean necesarias protecciones especiales para esta fase inicial. La protección magnética de máxima intensidad no vale para estos motores por cuanto en el arranque se tienen consumos de hasta 7 veces el nominal, sin embargo, sí vale la protección térmica (bimetal) ya que el tiempo que transcurre hasta alcanzar la intensidad de régimen es muy corto. En nuestro caso, dada la pequeña potencia del motor, podemos arrancarlo directamente en triángulo a una red de 220V. o en estrella a una de 380V.
U V W
Z X Y
R S T
U V W
Z X Y
S R T
Manual de prácticas
50
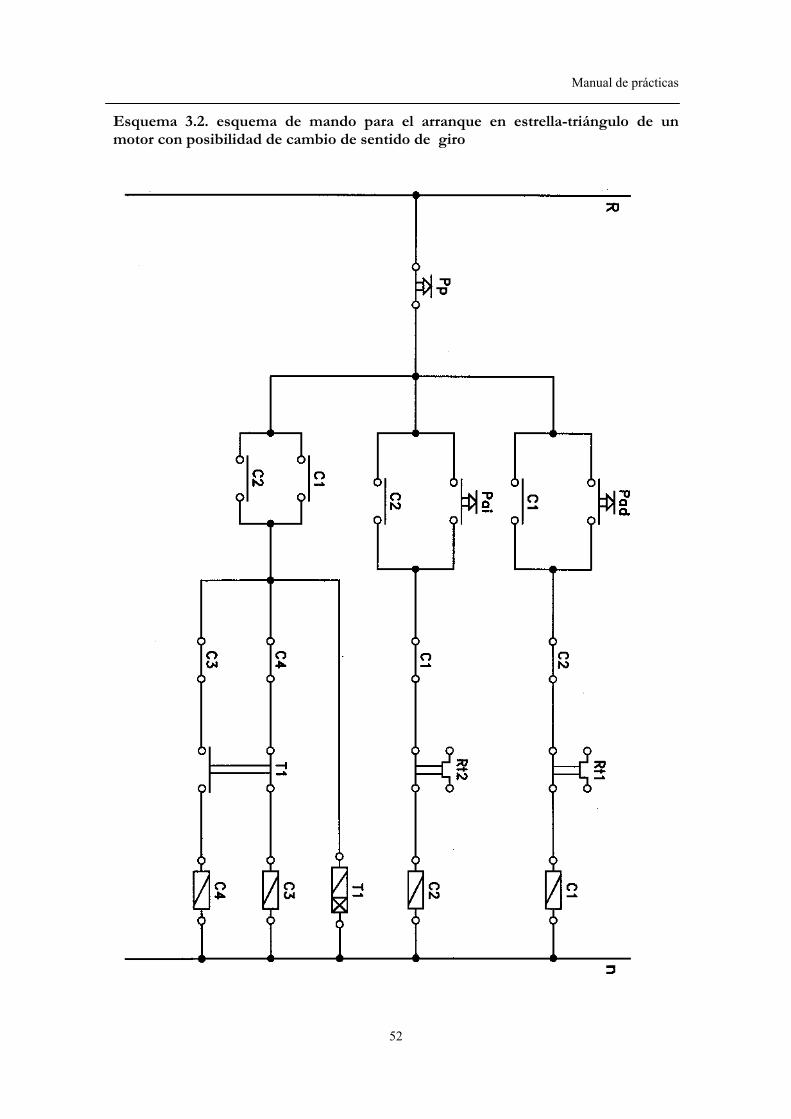
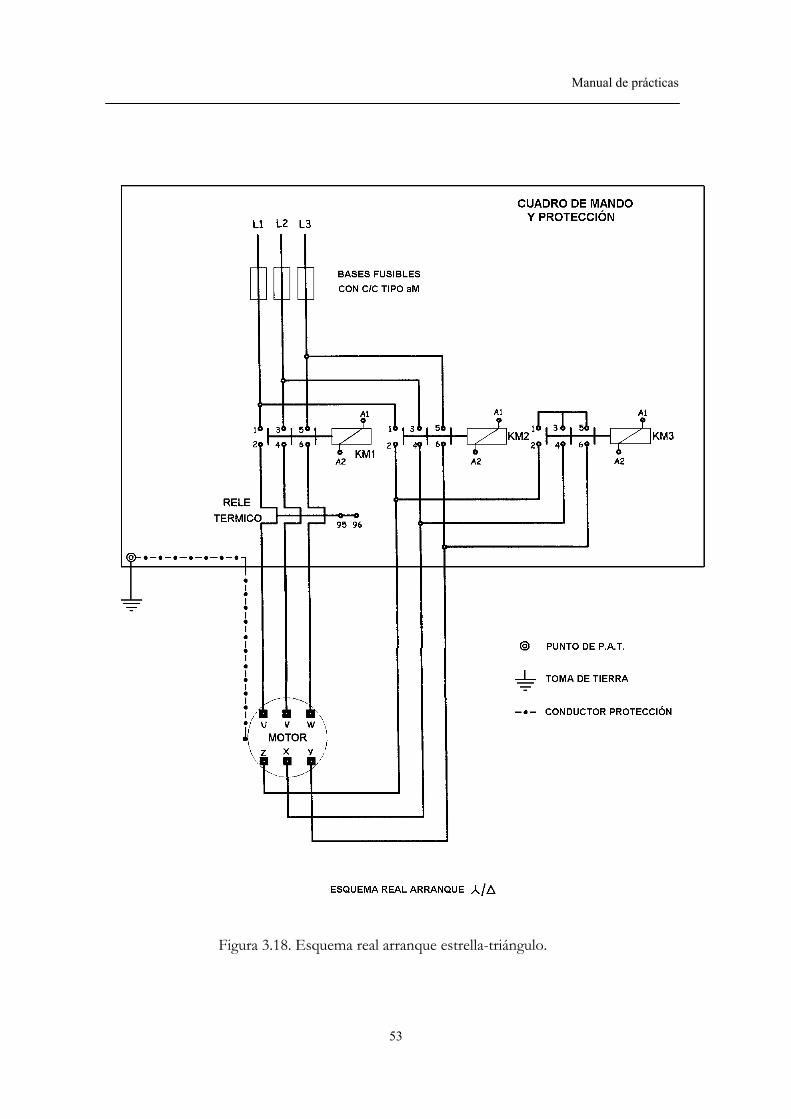
4.- MATERIAL Motor trifásico Contactores Guardamotores Temporizador y pulsadores para maniobrar. Aparatos de medida: voltímetro, amperímetro, fasímetro, vatímetro. 5.- EJECUCIÓN PRÁCTICA A continuación vamos a realizar un montaje práctico para estudiar algunos métodos de control de motores trifásicos. Para ello, realícese el montaje indicado en el esquema de fuerza 3.1. Como puede verse, se trata de un motor trifásico simple. Vamos a utilizar el conexionado en estrella y en triángulo. Para ello se dispone de una serie de contactores controlados por un temporizador. Este temporizador, una vez accionado por el pulsador de arranque, conecta el contactor de montaje en estrella. Transcurrido el tiempo prefijado en el temporizador, éste desconecta el contactor de montaje en estrella y conecta el de montaje en triángulo. Se dispone asímismo de otros contactores que, conectados antes de los anteriores, permiten permutar las fases entre si, con lo que se podrá controlar el sentido de giro del citado motor (arranque en sentido horario y en sentido antihorario). En el esquema 3.2 se encuentra el esquema detallado del circuito de mando. Los contactores C1 y C2 son los que controlan el sentido de giro permutando dos fases entre si. El relé térmico Rt1 es el encargado de proteger al motor frente a sobrecargas.. El contactor C3 es el que se encarga del conexionado en estrella, uniendo entre si los finales de las tres bobinas del motor. El contactor C4 conecta el motor en triángulo, ya que conecta los finales de las bobinas a otra fase diferente de la que se presenta a la entrada de las mismas. Evidentemente los contactores C3 y C4 no pueden actuar conjuntamente, ya que ello provocaría un cortocircuito entre fases. Por tanto se conectan en bloqueo mutuo. De forma similar se opera con los contactores C1 y C2 . El temporizador T1 es utilizado para controlar los contactores C3 y C4. En el instante inicial el temporizador arranca el motor con conexión en estrella. Cierto tiempo después se pasa a la conexión en triángulo. Un dato importante a tener en cuenta es que el motor del que disponemos para la práctica tiene un límite de tensión para sus bobinas de 220 V. Por ello, no puede ser conectado a una línea trifásica de 220/380 V. en triángulo, ya que en ese caso cada bobina soportaría 380 V. Para solventar este problema vamos a utilizar un autotransformador trifásico conectado en estrella para bajar la tensión de 220/380 a 127/220 V. El autotransformador trifásico se puede conseguir conectando en estrella tres autotransformadores monofásicos. Una vez realizado el montaje comprobar la efectividad del mismo conectando y desconectando el motor, cambiando el sentido de giro y las variaciones en la lectura de los amperímetros y voltímetros al pasar de la conexión de estrella a la de triángulo.

Manual de prácticas
51
Esquema 3.1. esquema de fuerza para el arranque en estrella-triángulo de un motor con posibilidad de cambio de sentido de giro
Manual de prácticas
52
Esquema 3.2. esquema de mando para el arranque en estrella-triángulo de un motor con posibilidad de cambio de sentido de giro
Manual de prácticas
53
Figura 3.18. Esquema real arranque estrella-triángulo.
Manual de prácticas
54
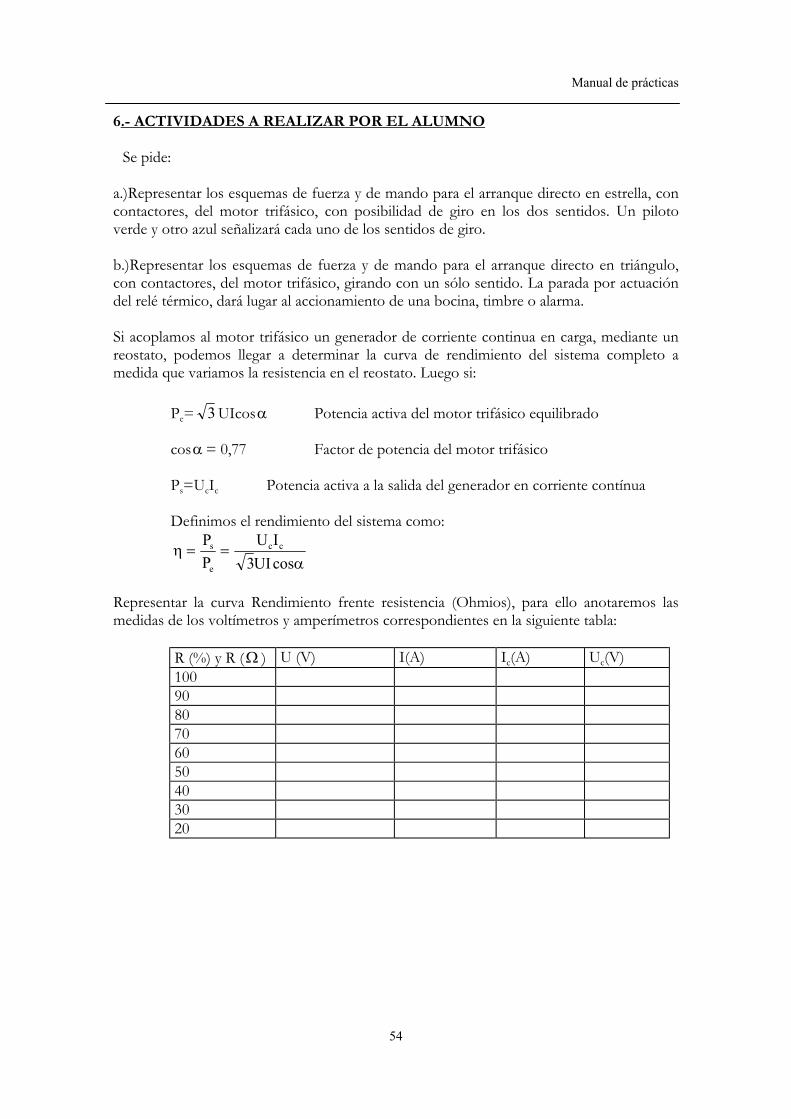
6.- ACTIVIDADES A REALIZAR POR EL ALUMNO Se pide: a.)Representar los esquemas de fuerza y de mando para el arranque directo en estrella, con contactores, del motor trifásico, con posibilidad de giro en los dos sentidos. Un piloto verde y otro azul señalizará cada uno de los sentidos de giro. b.)Representar los esquemas de fuerza y de mando para el arranque directo en triángulo, con contactores, del motor trifásico, girando con un sólo sentido. La parada por actuación del relé térmico, dará lugar al accionamiento de una bocina, timbre o alarma.
Si acoplamos al motor trifásico un generador de corriente continua en carga, mediante un reostato, podemos llegar a determinar la curva de rendimiento del sistema completo a medida que variamos la resistencia en el reostato. Luego si: Pe= 3 UIcos α Potencia activa del motor trifásico equilibrado cosα = 0,77 Factor de potencia del motor trifásico
Ps=UcIc Potencia activa a la salida del generador en corriente contínua
Definimos el rendimiento del sistema como:
ηα
= =PP
U IUI
s
e
c c
3 cos
Representar la curva Rendimiento frente resistencia (Ohmios), para ello anotaremos las medidas de los voltímetros y amperímetros correspondientes en la siguiente tabla:
R (%) y R ( Ω ) U (V) I(A) Ic(A) Uc(V) 100 90 80 70 60 50 40 30 20
Manual de prácticas
55
PRÁCTICA Nº 4
CORRECCIÓN DEL FACTOR DE POTENCIA O COMPENSACIÓN DE ENERGÍA REACTIVA.
1. INTRODUCCIÓN Todas las máquinas eléctricas alimentadas con corriente alterna (motores, transformadores,..) así como otros receptores (reactancias, bobinas, …) necesitan para su funcionamiento dos tipos de energía:
• Energía activa: es la que se transforma, íntegramente en trabajo o en calor (pérdidas) y se mide en kWh.
• Energía reactiva: se pone de manifiesto cuando existe un trasiego de energía activa entre la fuente y la carga. generalmente está asociada a los campos magnéticos internos de las máquinas y receptores y se mide en kVAr.h. Como ésta energía provoca sobrecargas en los generadores, transformadores y líneas , sin producir un trabajo útil, es necesario neutralizarla o compensarla.
Los condensadores generan la energía reactiva consumida por dichas cargas, evitando la sobrecarga de la instalación. Al instalar condensadores, se reduce el consumo total de energía (activa+reactiva), por lo que se consiguen las ventajas de todos conocidas. 1.1. TIPOS DE COMPENSACIÓN.- La compensación, en baja tensión, puede ser de tres tipos:
• Compensación global. Se realiza en la salida en B.T. del Transformador y presenta las siguientes características: Descarga el C.T. , aumentando la potencia disponible en kW. La energía reactiva y la intensidad reactiva, están presentes en toda la instalación. Las pérdidas por efecto Joule en los cables no disminuyen.
• Compensación parcial. Se realiza a la entrada de cada instalación particular y Optimiza una parte de la instalación
• Compensación individual. Se realiza en los bornes de cada receptor de tipo inductivo. Optimiza toda la instalación. La energía reactiva y la intensidad reactivan, no están presentes en los cables de la instalación, pues se abastece en el mismo lugar de consumo.
1.2. FORMAS DE COMPENSACION.- La compensación puede hacerse de dos formas: compensación fija o compensación automática, variable.

Manual de prácticas
56
• Compensación fija. Es aquella en la que suministramos a la instalación, de manera constante, la misma potencia reactiva, debido a que la demanda es constante. Suele darse cuando la potencia reactiva no llega al 15% de la activa.
• Compensación automática, variable. Es aquella en la que suministramos a la instalación, la potencia reactiva, según las necesidades de la instalación y de forma automática, debido a que la demanda es variable y suele superar el 15 % de la potencia activa. Para ello se utilizan las baterías automáticas de condensadores, formadas básicamente por condensadores y contactores y un regulador que detecta la demanda de reactiva.
1.3.CÁLCULO DE LA POTENCIA REACTIVA DE BATERÍA Y CONDENSADORES.- Para ello es necesario conocer:
• La potencia activa consumida en kW. • El cos α iniciall. • El cos α deseado
Si el régimen de funcionamiento no es dispar y se conocen las horas de funcionamiento, se producen resultados aceptables a partir del recibo de la compañía eléctrica. Tanto el motor universal como el motor trifásico son motores inductivos, luego para corregir el factor de potencia tendremos que conectar condensadores en paralelo. de capacidad apropiada.
a.-Para el motor universal
Tenemos un receptor monofásico con un triángulo de potencias inicial: P1; Q1; S1; y factor de potencia inicial cosα1 . Se quiere mejorar el factor de potencia del motor añadiendo condensadores hasta un valor cosα 2 manteniendo la misma potencia activa P2=P1; Q2; S2; Para saber el condensador que hay que añadir habrá que calcular en primer lugar la potencia reactiva que nos tiene que proporcionar los condensadores Qc :
Qc = P (tgα1 - tgα2 ) = U2 w C
wU
QC c2=
Q1 S1
S2
P1=P2
QC
Q2
α 2
α1

Manual de prácticas
57
Siendo: U tensión a la que están sometidos los condensadores en voltios
C capacidad de los condensadores en faradios w pulsación que es igual a 2π f f frecuencia (50 Hz)
b-Para el motor trifásico El problema se resuelve con el mismo procedimiento anterior. Al ser el motor equilibrado, el sistema de condensadores que hay que añadir también lo será, luego si el problema lo planteamos: dado un receptor trifásico equilibrado con unas características iniciales de trabajo: P1; Q1; S1; cosα1 y queremos mejorar el factor de potencia del motor hasta un valor cos α 2 añadiendo condensadores, manteniendo la misma potencia activa P2=P1; Q2; S2. Al hacer el estudio con las potencias tenemos el triángulo de potencias anterior, pudiendo ser para una fase o para las tres fases., tendremos los mismos resultados, sólo que para las tres fases será 3 veces más grande. Si ponemos los valores de la potencia total activa del motor obtendremos la potencia reactiva total trifásica a aportar; si ponemos la monofásica, el resultado lo multiplicamos por 3 y obtendremos lo mismo. Q1= P1 tgα1
Q2= Q1-Qc= P2 tgα2 = P1 tgα2 Luego, la potencia reactiva total que hemos de aportar a la red será
Qc = P (tgα1 - tgα2 ) = 3 Uc2w Ci
siendo Uc la tensión a la que está sometido cada condensador; w la pulsación y Ci la capacidad de cada condensador. a.- Si los condensadores los conectamos en asociación triángulo: La tensión Uc coincide con la tensión de linea U del sistema trifásico, por lo que la capacidad de cada condensador será:
C QU wt
c=3 2
b.- Si los condensadores los conectamos en asociación estrella: La tensión Uc coincide con una tensión de fase U´ del sistema trifásico, por lo que la capacidad de cada condensador será:

Manual de prácticas
58
Ce QU w
QU w
c c=
=
33
2 2
Luego, para obtener la misma potencia reactiva, si ponemos los condensadores en asociación en estrella necesitaremos condensadores tres veces mayores que si los montamos en triángulo. 2.OBJETIVOS En esta práctica se pretende medir el factor de potencia de :
a.-) Un motor universal funcionando con corriente alterna monofásica. b.-) Un motor trifásico funcionando en estrella y en triángulo.
Y corregirlo con diversas asociaciones de condensadores, viendo así cual de ellas puede ser la más conveniente. 3.- RELIZACIÓN PRÁCTICA a.-) Un motor universal En primer lugar mediremos el factor de potencia de dicho motor funcionando en vacío, para ello se realizará el montaje del esquema 6.1. Donde anotaremos las lecturas de los aparatos que tenemos conectados: voltímetro (V), amperímetro(A), fasímetro (cosα) y vatímetro (W). Con estos valores podremos calcular el triángulo de potencias del motor funcionando en vacío. Para corregir el factor de potencia del motor le vamos a ir añadiendo condensadores de distintas capacidades según el esquema 1; concretamente:
1.-Tres condensadores en serie de 9 microfaradios cada uno. 2.-Dos condensadores en serie de 9 microfaradios cada uno. 3.-Dos condensadores en serie entre sí con uno en paralelo de 9 microfaradios cada uno. 4.-Uno en paralelo de 9 microfaradios cada uno. 5.-Dos en paralelo de 9 microfaradios cada uno.
Para cada una de estas asociaciones anotaremos las lecturas de los aparatos que tenemos conectados: voltímetro (V), amperímetro(A), fasímetro(cosa) y vatímetro (W) en la tabla siguiente:

Manual de prácticas
59
Vacio 3 Serie 2Serie 2 S 1P 1 Parl. 2 Parl. V(V)
I(A)
cos α
P(W)
Q(VAr)
S(VA)
Se pide:
a.) Calcular y representar el triángulo de potencias del motor en vacío (condiciones iniciales) b.) Calcular y representar el triángulo de potencias del motor una vez que se le han añadido las distintas asociaciones de condensadores. ¿Qué capacidad de condensador será la solución más idónea para mejorar el factor de potencia de este motor?
b.-) Un motor trifásico funcionando en estrella y en triángulo. De la misma forma que en el caso anterior en primer lugar mediremos el factor de potencia del motor trifásico en triángulo y en estrella (receptor equilibrado) funcionando en vacío. Anotaremos las lecturas de los aparatos que tenemos conectados: voltímetro (V), amperímetro(A) y fasímetro (cosα). Con estos valores podremos calcular el triángulo de potencias del motor funcionando en vacío. Para corregir el factor de potencia tanto del motor trifásico funcionando en estrella como en triángulo le vamos a conectar en primer lugar una asociación de condensadores en estrella como se indica en el esquema 6.2. Y luego los mismos condensadores conectados en triángulo se lo asociaremos al motor trifásico como indica el esquema 6. 3. Concretamente tendremos los siguientes casos:
1.-Motor trifásico en estrella y condensadores en estrella. 2.-Motor trifásico en estrella y condensadores en triángulo. 3.-Motor trifásico en triángulo y condensadores en estrella. 4.-Motor trifásico en triángulo y condensadores en triángulo.
Para cada una de estas asociaciones anotaremos las lecturas de los aparatos que tenemos conectados: voltímetro (V), amperímetro(A) y fasímetro(cosα) en la tabla siguiente:

Manual de prácticas
60
Vacío estrella
Vacío triángulo
Me-Ce Me-Ct Mt-Ce Mt-Ct
V(V) I(A) Cos α
Se pide:
a.)Calcular y representar el triángulo de potencias del motor trifásico en estrella y en triángulo funcionando en vacío (condiciones iniciales) b.)Calcular y representar el triángulo de potencias de los motores en estrella y en triángulo una vez que se le han añadido las distintas asociaciones de condensadores. ¿Qué relación entre las capacidades de los condensadores puedes sacar al asociar en estrella o en triángulo los condensadores con el motor trabajando en triángulo?. ¿Y en estrella?.

Manual de prácticas
61
Esquema 4.1. Fuerza y mando para la corrección del factor de potencia del motor monofásico.

Manual de prácticas
62
Esquema 4.2.Fuerza y mando para la corrección del factor de potencia del motor trifásico funcionando en estrella o triángulo con una batería de condensadores en estrella.

Manual de prácticas
63
Esquema 4.3.Fuerza y mando para la corrección del factor de potencia del motor trifásico funcionando en estrella o triángulo con una bateria de condensadores en triángulo.

Manual de prácticas
64