1 OF 28 1 OF 62 A Brief Introduction to the Global Positioning System (GPS) CMPE-118 Lecture.
62
1 OF 28 1 OF 62 A Brief Introduction to the Global Positioning System (GPS) CMPE-118 Lecture
-
date post
21-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of 1 OF 28 1 OF 62 A Brief Introduction to the Global Positioning System (GPS) CMPE-118 Lecture.

1 OF 281 OF 62
A Brief Introduction to the Global Positioning System (GPS)
CMPE-118 Lecture

2 OF 282 OF 62
Global Positioning System (GPS)
• Satellite Navigation system
– Multilateration based on one-way ranging signals from 24+ satellites in orbit
– Operated by the United States Air Force
– Nominal Accuracy• 10 m (Stand Alone)• 1-5 m (Code
Differential)• 0.01 m (Carrier
Differential) ©2000 by Todd Walter and Per Enge

3 OF 283 OF 62
Navigation Terminology
• Navigation
– Answer the to the question “Where am I?”– Implies the use of some agreed upon coordinate system
• Related Terminology
– Guidance: Deciding what to do with your navigation information– Control: Orienting yourself/vehicle to follow out the guidance
decision. • Area of Study: GNC
– Guidance, Navigation, Control

4 OF 284 OF 62
Latitude (Parallels) are formed by the intersection of the surface of the earth with a plane parallel to the equatorial plane
Longitude (Meridians) are formed by the intersection of the surface of the earth with a plane containing the earths axis.

5 OF 285 OF 62
Latitude, Longitude and Altitude
• One of many coordinate systems used to described a location on the surface of the earth
• Latitude — parallels measured from the Equator.– North is “+”
• Longitude — meridians measured from Greenwich Observatory.– East is “+”
• Altitude — measured above reference datum: MSL– Normally Up is “+”

6 OF 286 OF 62
Stability of Clocks
Figure from Hewlett-Packard Application Note 1289: The Science of Timekeeping by D. W. Allan, Neil Ashby and Cliff Hodge.
• Clock stability is directly related to Navigation because Earth rotates ~15°/hour.
• Difference between local “celestial” time and reference yields Longitude.
• Atomic clocks are too big and too expensive for general use.

7 OF 287 OF 62
Position Fixing Methods
From Kyton and Fried, Avionics Navigation Systems, 2nd Ed., pp. 113.
a) Bearing and range ( position fixing (DME-VOR)
b) Dual bearing () position fixing (VOR-VOR)
c) Range ( position fixing (DME-DME, GPS)
d) Hyperbolic position fixing (LORAN, Omega)

8 OF 288 OF 62
Position Fixing (2-D)
23
23
23
22
22
22
21
21
21
yyxx
yyxx
yyxx
Assuming you can make the range measurements i , where i = 1,2,3, then the following three equations can be formed:

9 OF 289 OF 62
Fundamentals of Position Fixing
• The figure on the previous page raises to important questions:– How do you estimate or measure the ranges?– How do you solve the equations for the unknown x and y?
• The range based on measuring the time-of-flight of a RF signal that leaves the transmitter at t = t1 and arrives at the user at t = t2 is given by:
• In the presence of a clock error, t (= b/c), the range estimate (or measurement) becomes:
12 ttc
bttctcttcb 1212ˆ

10 OF 2810 OF 62
SV #1 SV #2
SV #3
3
21
cbucbu
cbu
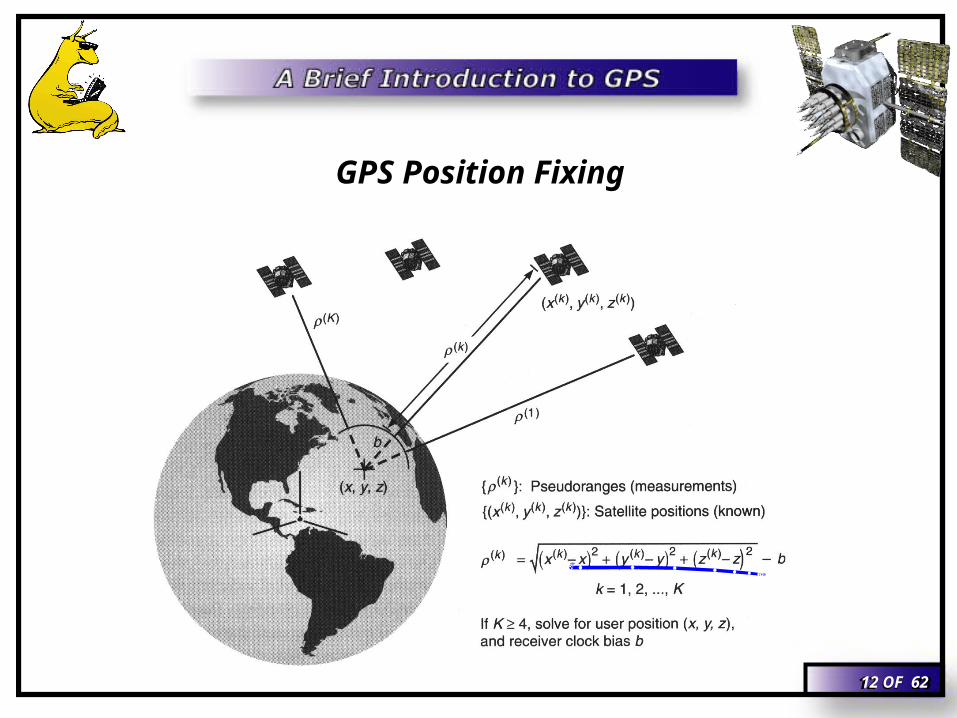
As a user located at point X, the true range measurements to the three GPS satellites are:
uTrue
uTrue
uTrue
cb
cb
cb
33
22
11
Your GPS receiver, however, measures 1, 2 and 3. These range measurement are called pseudoranges.
GPS Pseudoranges

11 OF 2811 OF 62
Psueodranges and Satellite Geometry
PseudorangeMeasurement Error
ResultingPositionUncertaintyAreas
Geometry plays a role in the accuracy of the final solution.
12 OF 2812 OF 62
GPS Position Fixing

13 OF 2813 OF 62
Solving Navigation Equations
• Solve the equations
– Easy and give you insight into the linearization process– GPS navigation equations.
• The position fixing system of equations where three independent range measurements are available was given as:
23
23
23
22
22
22
21
21
21
yyxx
yyxx
yyxx

14 OF 2814 OF 62
Linearization by Expansion
23
23
23
22
22
22
21
21
21
yyxx
yyxx
yyxx
23
23
23
22
22
22
21
21
21
ˆˆˆ
ˆˆˆ
ˆˆˆ
yyxx
yyxx
yyxx
Exact Equations you would solve in an ideal
world
Equations the you can or will solve
yyy
xxxiii
ˆ
ˆ
ˆ

15 OF 2815 OF 62
Linearization by Expansion (2)
iiiiiii 22ˆ 22222 (dropped higher order terms)
For the range measurements,
For the position coordinate x,
xxxxxxxxxx iiii 2ˆ 222
For the position coordinate y,
yyyyyyyyyy iiii 2ˆ 222
ni ,2,1Where,

16 OF 2816 OF 62
Linearization by Expansion (3)
yyyxxx iiiiiiii 2222ˆ 2222
Taking the difference between the true and estimated values,
Normally you have more equations than unknowns. Thus, you can do a least squares solution. That is,
y
x
yyxx
yyxx
yyxx
n
n
n
nn
2
2
2
2
1
1
1
1
2
1
G x
17 OF 2817 OF 62
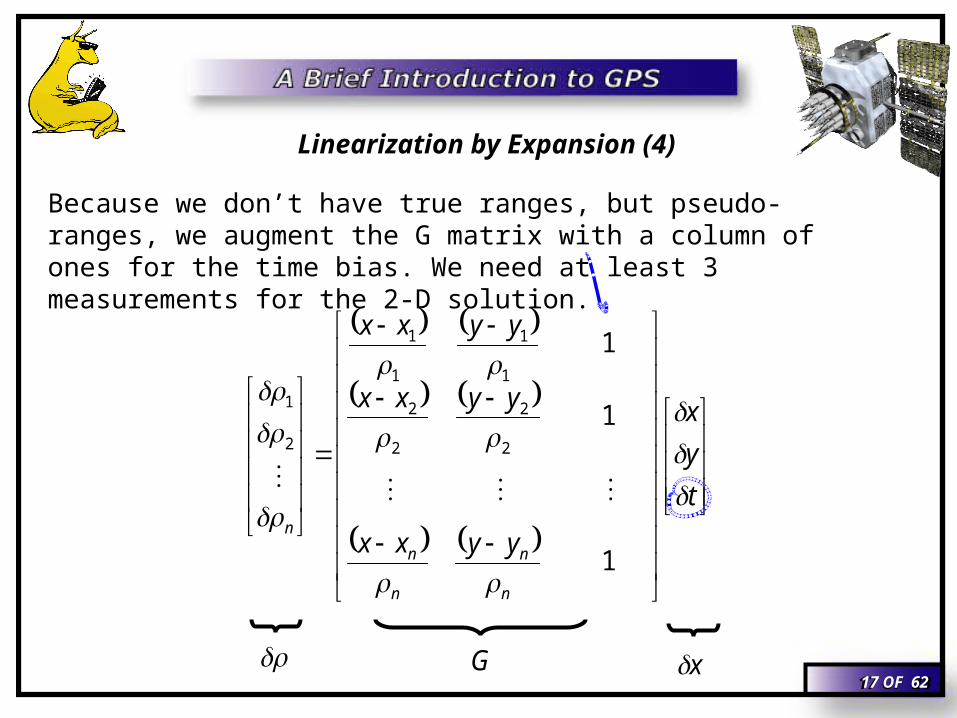
Linearization by Expansion (4)
Because we don’t have true ranges, but pseudo-ranges, we augment the G matrix with a column of ones for the time bias. We need at least 3 measurements for the 2-D solution.
t
y
x
yyxx
yyxx
yyxx
n
n
n
n
n
1
1
1
2
2
2
2
1
1
1
1
2
1
G x

18 OF 2818 OF 62
Least Squares Solution
TT GGGx
1
For the moment, without proof, we state that the least squares solution is given by,
• Algorithm for solving the navigation equation:
– 1) Pick an initial guess for x and y– 2) Compute for as many measurements as you have– 3) Form for all measurements and then form – 4) Solve for– 5) Update your initial guesses for x and y as follows:
– 6) Repeat until convergence
ii G
x
yyy
xxx
)()(
)()(

19 OF 2819 OF 62
Iterated Solution Numerical Example
• Solution is done in MATLAB
• Assumes an initial position of [0,0,0]
• Walks solution in to the final position
• Redraws the range circles at each iteration

20 OF 2820 OF 62
GPS Signal Structure
• GPS broadcasts a modulated carrier on L1 (1575.42 MHz)
• Pseudo-Random Noise (PRN) sequence of 1023 “chips” used to spread the signal
• PRN is carefully chosen to have unique auto— and cross—correlation properties
• All signal components generated from the same 10.23 MHz satellite clock

21 OF 2821 OF 62
GPS L1 Signal Generation

22 OF 2822 OF 62
GPS Signal De-Spreading
• In order to use the PRN code correlation properties to de-spread the GPS signal, need to recover code down to baseband (no carrier)
• Use trigonometric identities to mix down and remove the carrier
)cos()cos()cos()cos(2
)sin()sin()cos()cos()cos(
)sin()sin()cos()cos()cos(

23 OF 2823 OF 62
Graphical Depiction of De-Spreading

24 OF 2824 OF 62
PRN Auto- and Cross-Correlation

25 OF 2825 OF 62
PRN Correlation Example

26 OF 2826 OF 62
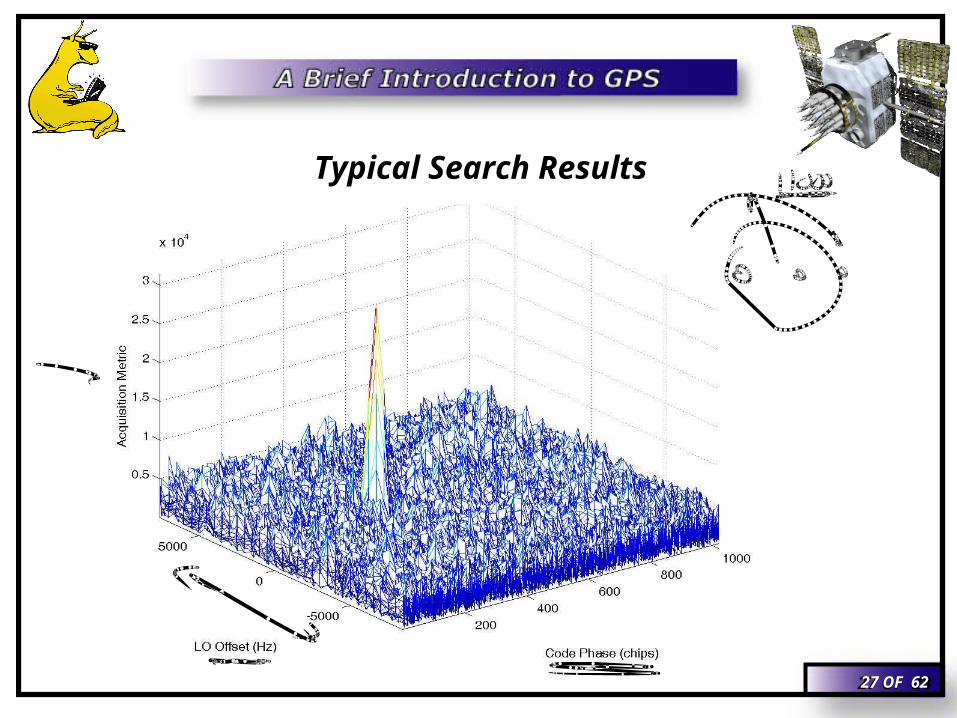
Initial Acquisition Search
• Assume 1 channel & 1 ms dwell period
• Exhaustive search (if real time) requires:
– (32) x (2046) x (20) x 1ms = 1309 seconds
• 12 channel assumption requires:
– (1309) / 12 = 109 seconds
27 OF 2827 OF 62
Typical Search Results

28 OF 2828 OF 62
Things to remember about GPS
• Navigation is a hard problem, and only recently has GPS made this easy!
• GPS is a system that has precise clocks on board that give you position and your time bias.
• PRN signal has correlation properties that allow you to find the signal in the noise even without any knowledge of position.

29 OF 2829 OF 62
Questions?

30 OF 2830 OF 62

31 OF 2831 OF 62

32 OF 2832 OF 62
Latitude Determination Using Polaris
The Sky Above Palo Alto on Jan 6, 2002
Actual location of Polaris is 89o 05’

33 OF 2833 OF 62
Instruments of Navigation
An Astrolabe A Sextant

34 OF 2834 OF 62
View Through a Sextant
Easier to “align” Sun’s (or other celestial body’s) limb with the horizon.

35 OF 2835 OF 62
Latitude Determination Using the Sun
nDeclinatio sSun' Altitude sSun' 900

36 OF 2836 OF 62
The Longitude Problem
• Celestial map changes because of Earth’s 15 o/hr (approximately) rotation rate.

37 OF 2837 OF 62
Longitude Determination
• Longitude Determination Methods– Methods based on time
• Compare the time between a clocks at the current location and some other reference point.
• Requires Stable Clocks
– Celestial Methods• Eclipses of Jupiter’s Moons• Lunar Distance Method

38 OF 2838 OF 62
Fundamentals of Radionavigation
• Radio Frequency (RF) signals emanating from a source or sources.
• The generators of the RF signal are at known locations
• RF signals are used to determine range or bearing to the known location

39 OF 2839 OF 62
Classification of Radio FrequenciesName of Band Frequency Range Wavelength
Very Low Frequency (VLF) < 30 kHz > 10 km
Low Frequency (LF) 30 – 300 kHz 1 - 10 km
Medium Frequency (MF) 300 kHz – 3 MHz 100 m – 1 km
High Frequency (HF) 3 – 30 MHz 10 – 100 m
Very High Frequency (VHF) 30 – 300 MHz 1 – 10 m
Ultra High Frequency (UHF) 300 MHz – 3 GHz 10 cm – 1 m
Super High Frequency (SHF) 3 – 30 GHz 1 – 10 cm
Propagation characteristic of RF signals is a function of their frequency

40 OF 2840 OF 62
Line of Sight Transmission
• VHF (VOR, ILS Localizer) and UHF (ILS Glide Slope, TACAN/DME) are line of sight systems.– Limited Coverage area
• LORAN and OMEGA are over the horizon systems– Large coverage area– In the case of Omega, coverage was global
• Frequency band in which GPS operates makes it a line of sight system. However, because of the location of the satellites, it is able to cover a large geographic area.

41 OF 2841 OF 62
INS and Radionavigation Systems
Land Sea Air
X X
X X
X
X
X
X
X X X
NDB – Non Directional Beacon
LORAN – Long RAnge Navigation
VOR – VHF Omni-directional Range
DME – Distance Measuring Equipment
ILS – Instrument Landing System
MLS – Microwave Landing System
INS – Inertial Navigation System*
Navigation SystemApplication
* INS is not a radionavigation system but is normally used in conjunction with such systems

42 OF 2842 OF 62
Phases of Flight
• The required navigation accuracy and reliability (i.e., integrity, continuity and availability) depend on the phase of flight
• Currently, as well as in the past, this meant that an aircraft had to be equipped with various navigation systems.

43 OF 2843 OF 62
VHF Omni-directional Range (VOR)
• Provides Bearing () Information
• Operates 112 – 118 MHz
• Accuracy 1o to 2 o.
• Principles of Operation (Enge et. al. “Terrestrial Radionavigation, pp. 81)
– Transmits 2 Signals• 1st Signal has azimuth
dependent phase• 2nd Signal is a reference• between the phases of
signal 1st and 2nd signal is

44 OF 2844 OF 62
Distance Measuring Equipment (DME)
• Measures Slant Range ()• Operates between 962 and 1213 MHz• Based on Radar Principle
– Airborne unit sends a pair of pulses– Ground Station receives pulses– After short delay (50 s) ground station resends the pulses back– Airborne unit receives the signal and calculates range by using the following
equation:
)50(2
1sTc

45 OF 2845 OF 62
• Used extensively during approach and landing to provides vertical and lateral guidance• Principle of Operation
– Lateral guidance provided by a signal called the Localizer (108-112 MHz)– Vertical guidance provided by another signal called the Glide Slope (329-335 MHz)
• Distance along the approach path provided by marker beacons (75 MHz)
Instrument Landing System (ILS)

46 OF 2846 OF 62
Time Scales
• Sidereal Time – Based on the time required by Earth to complete one revolution about its axis relative to distant stars.
• Apparent Solar Day - Time required for Earth to complete one revolution with respect to the sun
• Mean Solar Time - Same as apparent solar day except it is based on
– Hypothetical earth – Rotating in a circular orbit around
the sun.– Axis of rotation perpendicular to
the orbital plane– Same as Greenwich Mean Time
(GMT)
Sun
Earth
Earth’s Orbit
An Apparent Solar Day

47 OF 2847 OF 62
Universal & Atomic Time
• Universal Time (UT) – Time based on astronomical observations
– UT0 – Mean Solar Time measured at the prime meridian– UT1 – UT0 Corrected for Earth’s irregular spin rate and polar
motion• International Atomic Time (TAI)
– Based on Ce-133 Atom• Coordinated Universal Time (UTC)
– Set to agree with UT1 on January 1, 1958.– Leap seconds introduced to keep it within 0.9 seconds of UT1

48 OF 2848 OF 62
GPS Time
• GPS Time (GPST) – A continuous time scale (no leap seconds)– Based on Cesium and Rubidium standards– ‘Steered’ to be within fractions of a microsecond modulo one
second from UTC• Thus GPST-UTC = whole number of seconds + a fraction of a
microsecond.
• GPS time information transmitted by the satellites include– GPS second of the week - 604,800 seconds per week– GPS week number – 1024 weeks per epoch

49 OF 2849 OF 62
GPS Time (2)• GPS satellites carry atomic clocks
– Rubidium and/or Cesium frequency standards– Satellite clocks monitored by MCS
• Clock bias is modeled as a quadratic
• Parameters of the Quadratic are uploaded to Satellites which in turn broadcasts them as the navigation message
– Sub-frame 1 of the navigation message
• Clock correction term tr takes into account relativistic effects– Account for speed and location in the gravitation potential of the clocks– Net effect results in satellite clocks gaining ~38.4 sec per day– Compensated for by setting the satellite fundamental frequency of
10.23 MHz 0.00455 Hz lower.
rocfcff tttattaat 22010 )()(

50 OF 2850 OF 62
GPS Coordinate Frames
• Inertial Frame of Reference – Defined to be a non-accelerating or rotating coordinate frame of reference
– e.g., Earth Centered Inertial (ECI)– Required for analysis of satellite motion, inertial
navigation, etc.– Not convenient for terrestrial navigation
• Coordinate systems you will mostly encounter in GPS are
– Earth Centered Earth Fixed (ECEF)– East-North-Up (ENU)– Geodetic Coordinates
• Other coordinate systems used in navigation– North-East-Down (NED) – used widely in aircraft
navigation, guidance and control applications– Wander-Azimuth

51 OF 2851 OF 62
Coordinate Frame Relationships• Geodetic coordinates (h) to ECEF
• ECEF to Geodetic coordinates – Iterative algorithm– See Wgsxyz2lla.m in toolbox
)sin(1
)sin()cos(
)cos()cos(
)sin(1
081819190
m 6378137
2
2
heNz
hNy
hNx
e
aN
.e
a

52 OF 2852 OF 62
Geometry of Earth (1)
• Crude Approximation
– A sphere
– R0 = 6378.137 km
– A spherical model is only good for “back of the envelope” type of calculations
– Need a more precise model for navigation applications (especially inertial navigation)
• A more accurate model is an ellipsoid
– Parameters of the mathematical ellipsoid are defined in WGS-84

53 OF 2853 OF 62
Geometry of Earth (2)
• Topographic Surface – Shape assumed by Earth’s
crust. – Very complicated shape not
amenable to mathematical modeling
• Geoid– An equipotential surface of
Earth's gravity field which best fits, in a least squares sense, global Mean Sea Level (MSL).
• Reference Ellipsoid– Mathematical fit to the geoid
that happens to be an ellipsoid of revolution and minimizes the mean-square deviation of local gravity and the normal to the ellipsoid

54 OF 2854 OF 62
WGS-84 Reference Ellipsoid
• Some geometric facts about the WGS-84 Reference Ellipsoid
– Semi-major axis ( a ) = 6378137 m – Semi-minor axis ( b ) = 6356752 m– Flattening ( f ) = 1-(b/a) = 1/(298.25722)– Eccentricity ( e ) = [f(2-f)]1/2 = 0.081819191
• Given the WGS-84 Ellipsoid parameters, the following are derived quantities:
– RNS =
– REW =
2)(sin31 2 fa
)(sin1 2 fa
where’ )tan()1()tan( 2' f
= Geodetic Latitude’ = Geocentric Latitude
’

55 OF 2855 OF 62
Geoidal Heights

56 OF 2856 OF 62

57 OF 2857 OF 62
Orbital Mechanics• Kepler’s Law
– Based on observations made by Tycho Brahe (1546-1601)• First Law: Each planet revolves around the Sun in an elliptical path, with the
Sun occupying one of the foci of the ellipse. • Second Law: The straight line joining the Sun and a planet sweeps out
equal areas in equal intervals of time.• Third Law: The squares of the planets' orbital periods are proportional to
the cubes of the semi-major axes of their orbits.
• Explanation came later – Isaac Newton (1642-1727)
– Universal Law of Gravitation, where
combined with his second law leads
to ,2 r
r
r
mGMF SE
ES rrr
0)(
333
r
rrr
r
GMrr
r
mMGr ESE

58 OF 2858 OF 62
• Recast the two-body equation of motion.
• Characterize orbital ellipse– Semi-major Axis (A)– Eccentricity (e)
• Characterize orbit’s orientation in space
– Inclination (i)– Right Ascension of the
Ascending Node ()• Characterize ellipse’s
orientation in orbital plane– Argument of Perigee ()
• Position of the satellite in the orbit
– True anomaly ()
Six Keplerian Elements
• Sometimes it is convenient to sum and to form a new variable called argument of latitude

59 OF 2859 OF 62
GPS Orbital Parameters
• Perturbed Orbits - quasi-Keplerian 15 element set
– Non-central gravitational force– gravitational fields of the sun and
moon– solar pressure
• Additional 9 parameters – Three to account for the rate of
changes:• Right Ascension of the Ascending Node
(-dot)• Inclination (i-dot)• Mean motion (n-dot)
– Three pairs (6 parameter total) to correct
• Argument of latitude• Orbit radius• Inclination angle
Pertubative Torque caused by Earth’s Equatorial Bulge
Figure from Bate, Mueller and White, Fundamentals of Astrodynamics (1971), pp. 156

60 OF 2860 OF 62
GPS Constellation and Orbits
• Nominal Constellation – 24 Satellites.– At present more than 24 satellites on
orbit.• Semi-major axis – 26,560 km
• Eccentricity – less than 0.01
• Period – approximately 11 h 58 min
• Six orbital planes– Planes designated A through F– Inclination of 550 relative to the
equatorial plane– RAAN, , for the six orbital planes
separated by 600.– Four Satellites per orbital plane.
Satellites in a given orbital plane are distributed unevenly to minimize the
impact of a single satellite failure.

61 OF 2861 OF 62
GPS Ephemeris Calculation
• Compute the satellites position in the orbital coordinate frame
– Solve Kepler's equation ( E = M + e sin E ) for eccentric anomaly at epoch k, Ek.• Solution requires iteration if orbit is non-circular
– Compute the true anomaly, k
– Compute the argument of latitude k
– Use k to compute the corrections for argument of latitude, radius and inclination then apply the computed corrections.
– Compute the x and y coordinates (xk’ and yk’) of the satellite in it’s orbit.
• Covert the computed xk’ and yk’ position into ECEF coordinates– Compute the correction for the longitude of the ascending node.– Apply the correction to the longitude of the ascending node.– Compute the ECEF coordinates

62 OF 2862 OF 62
GPS Almanac• A subset of clock and ephemeris parameters.
– Limited to seven parameters and the associated reference time (toe)• Square root of semi-major axis ((A)1/2)• Eccentricity (e)• Inclination (i)• Longitude of ascending node (0)• Rate of right ascension (-dot)• Argument of perigee ()• Mean anomaly (M)
– Reduced precision– Allows determining approximate position of satellites
• All satellites broadcast almanac data for all other satellites in the constellation– Sub-frames 4 and 5 of the navigation message– Updated less frequently than the ephemeris parameters in sub-frames 2
and 3.