
1 Honors Physics 1 Class 15 Fall 2013 Rolling motion Noninertial reference frames Fictitious forces.
20
Honors Physics 1 Class 15 Fall 2013 Rolling motion Noninertial reference frames Fictitious forces
-
Upload
dwight-brown -
Category
Documents
-
view
213 -
download
0
Transcript of 1 Honors Physics 1 Class 15 Fall 2013 Rolling motion Noninertial reference frames Fictitious forces.

1
Honors Physics 1Class 15 Fall 2013
Rolling motion
Noninertial reference frames
Fictitious forces

2
Rolling motion
We will treat the case where
1)the axis of rotation passes through the center of mass.
2)the axis of rotation does not change direction.
Example = Rolling wheel

3
11.2 Rolling

4
11.3 The Kinetic Energy of Rolling
If we view the rolling as pure rotation about an axis through P, then
( is the angular speed of the wheel and IP is the rotational inertia of the wheel about the axis through P).
Using the parallel-axis theorem (I P= Icom +Mh2),
(M is the mass of the wheel, Icom is its rotational inertia about an axis through its center of mass, and R is the wheel’s radius, at a perpendiculardistance h).
Using the relation vcom =R, we get:
A rolling object, therefore has two types of kinetic energy: 1.a rotational kinetic energy due to its rotation about its center of mass (=½ Icom2), 2.a translational kinetic energy due to translation of its center of mass (=½ Mv2
com)

5
The Forces of Rolling: Friction and Rolling
A wheel rolls horizontally without sliding while accelerating with linear acceleration acom. A static frictional force fs acts on the wheel at P, opposing its tendency to slide.
The magnitudes of the linear acceleration acom, and the angular acceleration can be related by:
where R is the radius of the wheel.

6
The Forces of Rolling: Rolling Down a Ramp
A round uniform body of radius R rolls down a ramp. The forces that act on it are the gravitational force Fg, a normal force FN, and a frictional force fs pointing up the ramp.

7
Sample problem: Rolling Down a Ramp
A uniform ball, of mass M=6.00 kg and radius R, rolls smoothly from rest down a ramp at angle =30.0°.a) The ball descends a vertical height h=1.20 m to reach the bottom of the ramp. What is its speed at the bottom?Calculations: Where Icom is the ball’s rotational inertia about an axis through its center of mass, vcom is the requested speed at the bottom, and is the angular speed there.Substituting vcom/R for , and 2/5 MR2 for Icom,
b) What are the magnitude and direction of the frictional force on the ball as it rolls down the ramp?
Calculations: First we need to determine the ball’s acceleration acom,x :
We can now solve for the frictional force:

8
A wheel and a cube, both of mass M are made to race down a slope.The wheel rolls without slipping. The cube slides without rolling.
Which one gets to the bottom first?
Which one has greater KE at the bottom?

9
Energy analysis of rolling down a ramp
a) A cubical block with mass M and side 2R is allowed to slide without rolling down a ramp/slide from height h to height 0. How fast does the center of mass travel at the bottom of the slope?
b) A wheel with mass M and radius R is allowed to roll without slipping on a ramp of height h to the level ground at height 0. How fast does its center of mass travel at the bottom of the ramp?

10
The Yo-Yo

11
Galilean transformationsConsider measurements of the motion of a mass m made
from each of two coordinate systems.
For simplicity let’s assume that corresponding axes are parallel and the scale units (time and distance) are the same.
The origins of the two systems are displaced by S so
r r S
If the two systems move at a fixed velocity with respect to one another,
then
Observer sees the object moving with velocity .
Observer sees the object moving with velocity
V
dSV
dtdr
vdtd
v
.
r drV
dt dt

12
Galilean transformations 2
2
2
2 2
2 2
Observer measures acceleration .
Observer measures acceleration .
If V is constant then and
and Newton's second law is the same.
d ra
dt
d r d r dVa
dtdt dt
a a
F ma ma F

13
XKCD LINK

14
Linearly Accelerating FrameFictitious forces
How is Newton’s second law affected by measurement in accelerating frames?
assuming constant
Assuming the frame is inertial, then the frame observer
measures an additional force.
fict
a a A A
F ma
F ma mA F mA
F F F
15
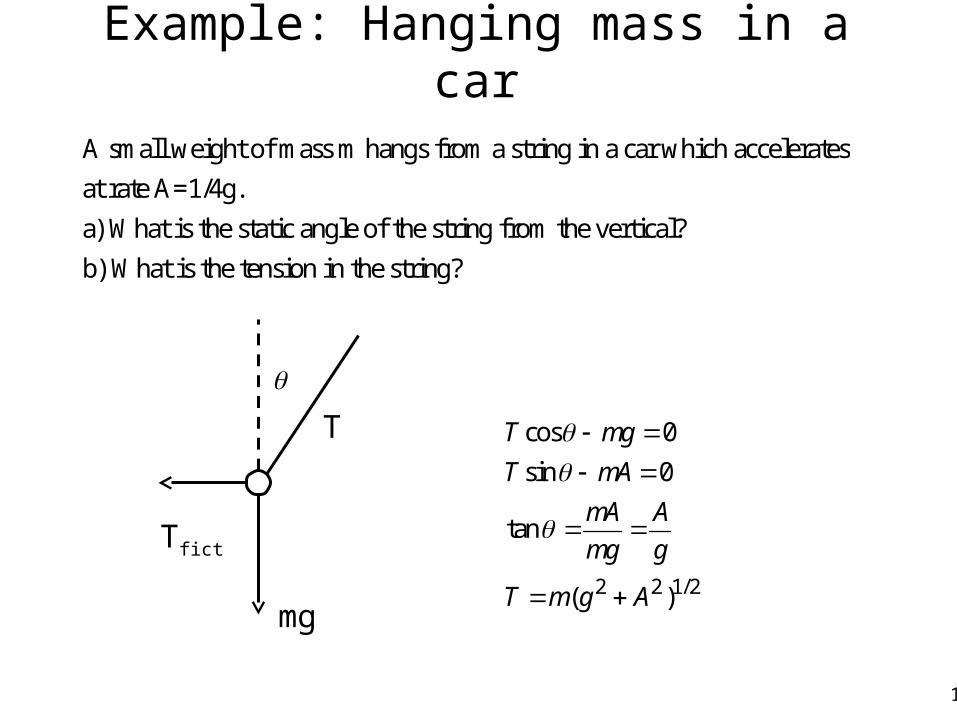
Example: Hanging mass in a carA small weight of mass m hangs from a string in a car which accelerates
at rate A=1/4g.
a) What is the static angle of the string from the vertical?
b) What is the tension in the string?
T
Tfict
mg
2 2 1/2
cos 0
sin 0
tan
( )
T mg
T mA
mA A
mg g
T m g A

16
Principle of Equivalence
In the example problem, we treated acceleration A in the same way as we treated gravitational acceleration.
The Principle of Equivalence states that there is no way to distinguish locally* between a gravitational acceleration and an acceleration of the coordinate system.
*Locally means that we don’t look outside the system for the cause of an acceleration or gravity.

17
Rotating motion and fictitious forces
Consider two reference frames, one rotating about the z axis, the other inertial. Origins coincide. Z axes coincide.What fictitious forces are observed in the rotating frame?We already have some experience with this from analyzing forces in the spinning terror ride and centripetal acceleration.

18
Rotating frames
Let's consider the time derivatives of a changing particle position
in inertial and rotating (primed parameters) frames.
Let the x,y,z and x',y',z' coordinates of the particle coincide at t=0.
At a later time ( ) ( ) so ( ) ( ).
Since observer' and observer(inertial) started in the same position,
' ( ) '( )
From the drawing we see that ' '( ) - ( )
r t t r t r r r t t r t
r r t t r t
r r r t r t

19
Rotating frames
We can easily calculate the difference between ( ) and '( ) :
'( ) ( )
'so or
This approach was general and applies to the time derivative of
any vect
inertial rot
r t r t
r t r t r t
dr drr v v r
dt dt
or, so we can apply it to and .
a
and using we have
2
From
in ininertial in
in rot
in rot
in rot rotrot
rot in rot
v a
dv dvv
dt dt
v v r
da v r v r
dt
a a v r
which, 2fict rotF m v m r

20
Fictitious forces in rotating frames
2
with
centrifugal force
m2 Coriolis force
fict rot
rot in
rot
F m v m r
v v r
m r
v


















