1. Computing intersections among line segmentsLine segment Lecture 2 intersection Boolean operations...
12
D7013E Computational Geometry - Håkan Jonsson 1 D7013E Lecture 2 Line segment intersection Boolean operations on polygons Subdivisions Map overlay Doubly-Connected Edge Lists Plane sweep Closest pairs D7013E Computational Geometry - Håkan Jonsson 2 1. Computing intersections among line segments 6 line segments, 15 intersections 7 line segments, 3 intersections Line segment intersection • Compute and report all intersections among a set of n line segments – Intersection means ”have at least one point in common” • A trivial solution based on brute-force: – For each pair of line segments: Compute the point of intersection between the lines that contain the line segments; if this point lie on both line segments, we have found an intersection – There are O(n 2 ) pairs so this takes O(n 2 ) time • So, do we really need to spend O(n 2 ) time? – Yes, there are Ω(n 2 ) intersections in the worst case – But there could also be just a few… • Interesting question: Is there a way to relate the running time to the number of intersections actually reported? D7013E Computational Geometry - Håkan Jonsson 3 D7013E Computational Geometry - Håkan Jonsson 4 Output-sensitive algorithms • An algorithm for which the time (or space) complexity depends not only on the size of the input (n in our case) but also the size of the output – As with Jarvis march for computing convex hulls • Let k be the number of intersections found – ”Number of pairs of intersecting line segments.” • We will now learn about an output-sensitive algorithm that computes all intersections in O(n log n + k log n) time • (There exists faster algorithms that run in O(n log n + k) time. These are optimal, but more complicated, and will not be covered.)
Transcript of 1. Computing intersections among line segmentsLine segment Lecture 2 intersection Boolean operations...

D7013E Computational Geometry - Håkan Jonsson 1
D7013ELecture2Linesegment
intersection
Booleanoperationsonpolygons
Subdivisions
Mapoverlay
Doubly-ConnectedEdgeLists
Planesweep
Closestpairs
D7013E Computational Geometry - Håkan Jonsson 2
1. Computing intersections among line segments
6 line segments, 15 intersections 7 line segments, 3 intersections
Line segment intersection • Computeandreportallintersectionsamongasetofnline
segments– Intersectionmeans”haveatleastonepointincommon”
• Atrivialsolutionbasedonbrute-force:– Foreachpairoflinesegments:Computethepointofintersection
betweenthelinesthatcontainthelinesegments;ifthispointlieonbothlinesegments,wehavefoundanintersection
– ThereareO(n2)pairssothistakesO(n2)time
• So,dowereallyneedtospendO(n2)time?– Yes,thereareΩ(n2)intersectionsintheworstcase– Buttherecouldalsobejustafew…
• Interestingquestion:Isthereawaytorelatetherunningtimetothenumberofintersectionsactuallyreported?
D7013E Computational Geometry - Håkan Jonsson 3 D7013E Computational Geometry - Håkan Jonsson 4
Output-sensitive algorithms • Analgorithmforwhichthetime(orspace)complexity
dependsnotonlyonthesizeoftheinput(ninourcase)butalsothesizeoftheoutput– AswithJarvismarchforcomputingconvexhulls
• Letkbethenumberofintersectionsfound– ”Numberofpairsofintersectinglinesegments.”
• Wewillnowlearnaboutanoutput-sensitivealgorithmthatcomputesallintersectionsin
O(nlogn+klogn)time
• (ThereexistsfasteralgorithmsthatruninO(nlogn+k)time.Theseareoptimal,butmorecomplicated,andwillnotbecovered.)

Lower bound: Ω(nlogn+k) • Thetermkisobvious;wehavetooutputtheresult• Thetermnlogncanbeshownbyareductionfrom:• ELEMENT-UNIQUENESS:
– Givenasetofnnumbers,{x1,x2,…,xn},aretwoofthemequal?
– RequiresΩ(nlogn)comparisons[Ben-Or1983]– (Easytosolvebysorting)
• Recallthatinourmodelallcommonbinaryoperatorslike<,>,=,AND,OR,NOT,+,-,*,/etccanbeperformedinunit(constant)time– So,ELEMENT-UNIQUENESSrequiresΩ(nlogn)time
D7013E Computational Geometry - Håkan Jonsson 5
Lower bound reduction • LetAbeanyalgorithmthatcomputesintersections
amonglinesegments• WecanthensolveELEMENT-UNIQUENESSby
constructingshortlinesegmentsforthenumbersintheset,runA,andchecktheresult– Mapxito,forinstance,thelinesegment[(xi,0),(xi,1)]– Then,Awillreportintersectionsifftherearei≠j,xi=xj
• SinceeverythingelsethanAtakesO(n)time,itmustbeAthattakesΩ(nlogn)time
D7013E Computational Geometry - Håkan Jonsson 6
{x1,x2,…,xn}=>
x1 x5 x4 x3 x2 xn … …
D7013E Computational Geometry - Håkan Jonsson 7
Observation 1 about our intersections
• Onlylinesegmentsthatoverlapifprojectedontothey-axismightintersect!
Algorithmic technique: Plane sweep • Imagineahorizontallinesweepingdownwardsoverthe
plane,startingabovealllinesegments– Alsocalledlinesweep(orjustsweep)
• Asthissweeplineismoved,wekeeptrackofthesetoflinesegmentsthatitintersects-thestatus– Thestatuscontainstheintersectedlinesegmentsorderedin
thex-directionbyhowtheyintersectthesweepline• Ingeneral,thestatusisinvariant.Itonlychangeswhen
thesweeplineverticallyreachesaneventpoint• Aneventpointiseither
– anendpointofalinesegment,or– apointofintersectionbetweentwolinesegments
D7013E Computational Geometry - Håkan Jonsson 8

D7013E Computational Geometry - Håkan Jonsson 9
Example
s3
s7
s1
s5 s6
s2
s4
Start.
D7013E Computational Geometry - Håkan Jonsson 10
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 11
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 12
Example
s3
s7
s1
s5 s6
s2
s4

D7013E Computational Geometry - Håkan Jonsson 13
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 14
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 15
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 16
Example
s3
s7
s1
s5 s6
s2
s4

D7013E Computational Geometry - Håkan Jonsson 17
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 18
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 19
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 20
Example
s3
s7
s1
s5 s6
s2
s4

D7013E Computational Geometry - Håkan Jonsson 21
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 22
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 23
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 24
Example
s3
s7
s1
s5 s6
s2
s4

D7013E Computational Geometry - Håkan Jonsson 25
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 26
Example
s3
s7
s1
s5 s6
s2
s4
D7013E Computational Geometry - Håkan Jonsson 27
Example
s3
s7
s1
s5 s6
s2
s4
Done.
D7013E Computational Geometry - Håkan Jonsson 28
Observation 2 about our intersections
• Iftwolinesegmentsintersect,theymustatsometimeduringthesweeplienexttoeachotherinthestatus!

D7013E Computational Geometry - Håkan Jonsson 29
Algorithm • Useaneventqueue(apriorityqueue)tostore
eventpointsorderedbytheiry-coordinate• Insertall2nendpointsoflinesegmentsinthe
beginning• Startwithanemptystatus,andgo(”sweep”)from
oneeventpointtothenextwhilekeepinginvariantthat:
”Abovethesweeplineallpointsofinter-sectionhavebeencomputed.”
• Important:
– Thestatusdoesnotcontainthecoordinateswherethesweeplineintersects.Itholdstheorderinwhichlinesegmentsintersectthesweepline
D7013E Computational Geometry - Håkan Jonsson 30
Algorithm (cont.) • Thishappensataneventpointwhen…
– Anupperendpointisreached:Insertthenewlinesegment(intothestatus)andtestitforintersectionswithitsneighborsbelowthesweepline;inserttheintersectionpointsaseventpoints,ifany
– Apointofintersectionisreached:Swapthelinesegmentsthatintersectandtestthemforintersectionsbelowthesweeplinewiththeirnewneighbors.Iftheyintersect,insertthepointsasneweventpoints
– Alowerendpointisreached:Deletethelinesegmentandtestwhetherthetwonewneighborsintersectbelow.Iftheyintersect,insertthepointasaneweventpoint
Report intersections!
Data structures used • Eventqueue
– Abalancedbinarysearchtree• AVL-trees,red-blacktrees,etcthatsupport
insertion,deletion,neighbor(successorandpredecessor),andlookupinO(logm)timewhenthetreecontainsmitems
– Defineanorderbetweentheeventpoints(highestfirst,leftmosttobreakties)
• Status– Abalancedbinarysearchtree
• (Onecanstoreanything-notjustnumbers-insuchatreeaslongastheitemsarecomparable)
• NB!Comparisonsbetweenlinesegmentsisdonebycomputingpointsofintersectionwiththesweeplinewhenneededonly
D7013E Computational Geometry - Håkan Jonsson 31 D7013E Computational Geometry - Håkan Jonsson 32
A degenerate case
Special delicate care must be taken if line segments share end points

D7013E Computational Geometry - Håkan Jonsson 33
Analysis
• Weinserted2nendpointsintotheeventqueue:– O(nlogn)time.
• Eachintersectionwasinsertedasaneventpoint:– O(klogn)time.
• Total:– O(nlogn+klogn)=O((n+k)logn)time.
D7013E Computational Geometry - Håkan Jonsson 34
Reflection • O((n+k)logn)time…?Betteranalysispossible-seeLemma2.3!• Thisisworsethanthebrute-forcesolution(O(n2))ifkismorethan
O(n2/logn)butbetterwhenkisless– Itis,however,output-sensitive
• ComparewiththeincrementalalgorithmthatcomputesconvexhullsfromLecture1– Ouralgorithmisalsosort-ofincremental…
• …makesmonotoneprogressandkeepsaninvariant– butstilldifferent
• …considersnotonlyinputpoints(=endpointsoflinesegments)butalsointersectionsthatarefoundduringthecourseofthealgorithm
• Todetermineifthereareintersections,wejustneedtostopthelinesweepassoonasthefirstintersectionisfound,ifitexists– So,this(simpler)problemcanbesolvedinO(nlogn)time
D7013E Computational Geometry - Håkan Jonsson 35
Doubly-Connected Edge Lists (DCEL)
• Adatastructuresuitabletokeeptrackofsubdivisionsoftheplaneintodifferentkindsofregions.
D7013E Computational Geometry - Håkan Jonsson 36
Some basic definitions (Cont.)
• Apolygonalchainisafiniteconcatenationoflinesegmentswhereconsecutivesegmentsshareoneendpoint(”Oneendswherethenextstarts”)
• Asimplepolygonisa”closedpolygonalchainthatdoesn’tself-intersect”– Simplepolygonshaveverticesandedgesthatformstheirboundaries
– Aconvexhullisasimplepolygonvertex
edge

D7013E Computational Geometry - Håkan Jonsson 37
DCEL:s • Geometricaldata:
– Coordinates• Topologicaldata:
– Pointerstoneighboringitems
D7013E Computational Geometry - Håkan Jonsson 38
DCEL:s • Storeddata:
Lists/arrays
D7013E Computational Geometry - Håkan Jonsson 39
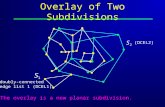
The overlay of two subdivisions Euler’sformula
• Foranembeddingofaplanargraphwithvvertices,eedges,andffaces(regionsboundedbyedges,includingtheouter,infinitely-large,region)withoutcrossingedges,
v−e+f=2
D7013E Computational Geometry - Håkan Jonsson 40
(v=7, e=8, f=3)

D7013E Computational Geometry - Håkan Jonsson 41
Applying plane sweep
• Maintainadoubly-connectededgelistduringthesweepoverthesubdivisions.
D7013E Computational Geometry - Håkan Jonsson 42
An application: Boolean operations
Application:ComputingClosestPairsusingPlaneSweep• Problem:
– Givenasetofpoints,findapairofpointswiththesmallestdistancebetweenthem
• RequiresΩ(nlogn)time– Simplereduction
• SolvedinO(nlogn)timebymanyalgorithms,forinstanceplanesweep
D7013E Computational Geometry - Håkan Jonsson 43
LowerBoundonClosestPairComputations• ReductiontoElementUniqueness:• Givenasetofnumbers{xi}(and
facedwithhavingtodecideifallareunique),we– 1)constructpointspi=(xi,0),– 2)runanyClosestPointalgorithm,and– 3)checkifthedistancebetweenthe
closestpointsreturnedis0ornot• Ifnot0,allareuniqueandotherwise
thereareduplicates• WehavesolvedElementUniqueness
thatrequiresΩ(nlogn)time,andapartfromtheClosestPointalgorithm,everythingwedotakesO(n)time
• So,itmustbetheClosestPointalgorithmthattakesΩ(nlogn)time.
D7013E Computational Geometry - Håkan Jonsson 44
p2 p1p3 p4p5 p0

D7013E Computational Geometry - Håkan Jonsson 45
d
d
d
d
Max 6