
1 Application of Soft Computing Techniques in Tunnelling ... Corner/2019/Shreyas and Dey, IIS,...
33
1 Application of Soft Computing Techniques in Tunnelling and Underground Excavations: 1 State of the Art and Future Prospects 2 3 ABSTRACT 4 This article aims to provide a concise review on the state-of-the-art application of soft computing techniques to 5 predict various parameters in tunnelling and underground excavations. Various soft computing techniques 6 involving Data Mining and Machine learning have found their application in the tunnelling related problems. This 7 article explores the application of Artificial Neural Networks (ANN), Radial Basis Functions (RBFs), Decision 8 trees (DT), Random Forest (RF) method, Support Vector Machines (SVM), non-linear regression methods like 9 Multi-Adaptive Regression Splines (MARS) and hybrid intelligent models in the prediction of engineering 10 response of tunnels and underground excavations. They help in predicting crucial parameters that decide the 11 serviceability of tunnels and associated structures lying above the tunnel cavity. The researchers working in this 12 domain have utilized the real time data available from the construction projects in creating various machine- 13 learning models. It is observed that there are no proper guidelines to obtain an optimal network architecture in 14 ANN for assessing the parameters of the stated problem. RBFs and Wavelet Neural Networks (WNN), which 15 evolved from ANN, showed improvement in prediction accuracy. SVM and MARS methods are ornamented with 16 improved computational efficiency and robustness of the algorithm. DT and RF methods are interpretable and 17 computationally less expensive compared to neural networks. Hybrid intelligent models provided globally optimal 18 solutions for non-linear complex problems than simple neural network models. The limitations of the adopted soft 19 computing methods are also emphasized. Overall, this article provides an intricate insight on the various soft 20 computing techniques used by researchers to improve the performance of the machine learning models. 21 22 Keywords Soft Computing; Neural Networks; Radial Basis Functions; Support Vector Machines; Multivariate 23 Adaptive Regression Splines; Random forest; Decision trees; Hybrid Intelligent models; Tunnelling and 24 Underground Excavation 25 26 27 28 29 30
Transcript of 1 Application of Soft Computing Techniques in Tunnelling ... Corner/2019/Shreyas and Dey, IIS,...

1
Application of Soft Computing Techniques in Tunnelling and Underground Excavations: 1
State of the Art and Future Prospects 2
3
ABSTRACT 4
This article aims to provide a concise review on the state-of-the-art application of soft computing techniques to 5
predict various parameters in tunnelling and underground excavations. Various soft computing techniques 6
involving Data Mining and Machine learning have found their application in the tunnelling related problems. This 7
article explores the application of Artificial Neural Networks (ANN), Radial Basis Functions (RBFs), Decision 8
trees (DT), Random Forest (RF) method, Support Vector Machines (SVM), non-linear regression methods like 9
Multi-Adaptive Regression Splines (MARS) and hybrid intelligent models in the prediction of engineering 10
response of tunnels and underground excavations. They help in predicting crucial parameters that decide the 11
serviceability of tunnels and associated structures lying above the tunnel cavity. The researchers working in this 12
domain have utilized the real time data available from the construction projects in creating various machine-13
learning models. It is observed that there are no proper guidelines to obtain an optimal network architecture in 14
ANN for assessing the parameters of the stated problem. RBFs and Wavelet Neural Networks (WNN), which 15
evolved from ANN, showed improvement in prediction accuracy. SVM and MARS methods are ornamented with 16
improved computational efficiency and robustness of the algorithm. DT and RF methods are interpretable and 17
computationally less expensive compared to neural networks. Hybrid intelligent models provided globally optimal 18
solutions for non-linear complex problems than simple neural network models. The limitations of the adopted soft 19
computing methods are also emphasized. Overall, this article provides an intricate insight on the various soft 20
computing techniques used by researchers to improve the performance of the machine learning models. 21
22
Keywords Soft Computing; Neural Networks; Radial Basis Functions; Support Vector Machines; Multivariate 23
Adaptive Regression Splines; Random forest; Decision trees; Hybrid Intelligent models; Tunnelling and 24
Underground Excavation 25
26
27
28
29
30

2
1. INTRODUCTION 31
Tunnels are quite common in many metropolitan cities around the world, utilized especially to divert the vehicle 32
flow and to ensure safety and comfort to the pedestrians through underground walkways. These underground 33
excavations find their necessary application in roadways, railways, mining ores, subways, and channels for 34
conducting water and sewage. Tunnels can be excavated through hills, under the sea or rivers, and even under 35
major structures or buildings. The interference of tunnels with buildings and other structures influence the decision 36
made at the design stage and during construction. Some of the common methods used in tunnel construction are 37
(a) the cut and cover method, (b) the pipe jacking method, and (c) the bored tunnel method [1,2]. The cut and 38
cover method is used to build shallow tunnels, where a trench is cut in the soil and is covered by a load bearing 39
support. The pipe jacking method is used to construct tunnels under roads or railways by driving specially made 40
pipes in the ground using hydraulic jacks. Tunnel Boring Machines (TBMs) are used in bored tunnel method that 41
encompasses an easier and automatic tunnelling process. During the excavation process, the difficulty increases 42
with the size of opening, which, in turn, lead to complications such as surface settlements, convergence inside the 43
opening and delay in the production rates of tunnel cycle. To predict the magnitude of surface settlements, 44
empirical and semi empirical methods are available in literature [3-6]. There are analytical techniques, prescribed 45
in literature, to estimate the tunnel convergence with the aid of convergence-confinement method [7,8], and the 46
compressibility and flexibility method [9]. The analytical methods to estimate convergence involve many 47
simplifications and assumptions pertaining to elastic behavior [10] and soil isotropy [11]. The prediction of 48
settlement or convergence involves multiple input parameters that correlate to the influential factors such as rock 49
mass properties, tunnel geometry and engineering ground conditions [43]. Since the estimation of desired output 50
is affected by several input parameters, due consideration of their inter-correlations is critical in analysis and 51
design. The empirical and analytical approaches fail to account for the simultaneous effects of all factors that 52
concurrently influence the desired output. A designer uses empirical formulae for estimations based on previous 53
experiences at initial stages of design, but the final design stage requires rigorous stress-deformation analysis, 54
utilizing finite difference or finite element methods [21]. Hard computing techniques, such as numerical 55
modelling, which are referred as precise models, are widely used in tunnelling projects [12-18]. Maji and Adugna 56
[19] developed a numerical model to evaluate critical face pressure and grout pressure by analysing the soil 57
movements (vertical deformation and horizontal displacements) around the tunnel. Do et al. [20] developed a 58
three-dimensional numerical model of mechanised tunneling process to predict ground movements and structural 59
forces induced in a tunnel lining. Implementing a numerical model is highly complex, especially when mechanised 60
3
process of shield excavation is considered [21]. The predictive performance of numerical models highly depends 61
on the model describing soil behaviour [22]. Detailed information on soil properties which is required for 62
simulations is unavailable in many cases which further complicates the development of a practical constitutive 63
soil model [23]. It requires significant computational effort to correlate the ground movements with various soil 64
parameters [21]. Soft computing techniques provide an alternative solution for solving complex non-linear 65
problems through mathematical mapping. They exploit the given tolerance of imprecision, partial truth, and 66
uncertainty for a particular problem. Soft computing techniques such as Fuzzy logic [24-26], Hybrid Intelligent 67
models [27-29], Neural Networks [30], and Machine learning methods [31,32] are widely applied in the field of 68
tunnelling. 69
70
This paper provides a succinct review of the studies related to the application of various soft computing methods 71
in the context of tunnelling and underground excavations. The merits and shortcomings of different methods are 72
elucidated, thereby highlighting the efficacy and limitation of application of these various approaches. 73
Considering the benchmark researches conducted in this domain, the possible future of the application of soft 74
computing in tunnelling and underground excavation is presented. 75
76
2. APPLICATION OF SOFT COMPUTING TECHNIQUES IN TUNNELLING ENGINEERING 77
Soft computing tends towards solving scientific, economic and engineering problems using flexible, non-rigid 78
tools, such as fuzzy logic, statistical tools or neural networks. Artificial Intelligence (AI) involves in the 79
development of tools towards building intelligent systems, that learn, are adaptable and to some extent, and can 80
emulate, or even exceed, human intelligence. Soft computing techniques use similar tools to solve real world 81
problems. AI has wide range of applications covering many fields of research namely deep learning, social 82
network analysis, machine learning, internet of things, image analytics, graph analytics, audio analytics, virtual 83
personal assistant, and natural language processing. In terms of the approaches, AI has a wide range of branches 84
as shown in Fig. 1. Artificial Neural Network (ANN) is a computational model which works similar to the 85
functioning of human nervous system. Based on mathematical operations and parameters required to determine 86
the output from a neural architecture, six types of ANN are commonly used in machine learning, namely Feed 87
Forward Neural Network (FFNN), Radial Basis Function Network (RBFN), Recurrent Neural Network (RNN), 88

4
Modular Neural Network (MNN), Convolutional Neural Network (CNN), and Kohonen Self Organizing Maps 89
(SOM). 90
91
Fig. 1 Depiction of various branches of Artificial Intelligence 92
93
In the domain of tunnelling engineering, AI is utilized particularly on three broad topics: (a) Prediction of 94
maximum surface settlement due to underground excavations [33-40] (b) Prediction of the convergence inside 95
tunnels due to squeezing behavior [41-43], and (c) Modelling the performance of Tunnel Boring Machine (TBM) 96
[44,45]. ANN is also used to predict tunnel support stability [46], to identify probable failure modes in 97
underground openings [47], and to predict next cycle tunnelling production rate that is indicative of the progress 98
achieved over a period of time (m/day) [48]. However, only few literatures are reported in the above stated topics 99
that investigates the suitability of neural networks. The following subsections briefly discuss the research work 100
conducted in the field of tunnelling through various machine-learning techniques. 101
102
2.1. Modular Neural Networks 103
Modular neural networks (MNN) consists of modules, referred as expert networks, that compete to learn different 104
aspects of a problem [49]. In addition, MNN has an integrating unit called a gating network that assigns different 105

5
features of the input space to the different expert networks [50]. Figure 2 depicts a typical MNN. One of the first 106
attempts made to improve the prediction accuracy through soft computing techniques was by Shi et al. [33]. The 107
main objective was to study the effect of discrete input variables and multiple output variables on the neural 108
network models. A general NN model and a modular NN were developed using the field data pertaining to Brasilia 109
tunnel, Brazil. The tunneling project used three different excavation methods and, accordingly each training 110
method is assigned a discrete numeric value for the purpose of training a general NN model. Although, there is 111
no relationship between different construction methods, numerating the variable establishes undesirable 112
relationships in neural computations, which leads to issues with error convergence. In order to tackle this issue, 113
modular NN was utilized to improve the error convergence during training process. A modular network consists 114
of multiple NN modules, in which each one represents one specific aspect of a complicated real-world problem. 115
Modular network architecture can be split into two or more sub-systems in which an individual subsystem 116
evaluates either distinct inputs or same inputs without communicating with the other subsystems [51]. In modular 117
approach, the number of modules to be created is directly related to the number of input variables. Hence, it is 118
recommended to avoid unimportant input variables. Shi et al. [33] referred to three excavation methods used in 119
the project. Therefore, three modules were created corresponding to the three chosen construction methods. In 120
modular NN approach, each module should be trained and tested separately using the data patterns in its category. 121
Therefore, three separate modules were trained and tested to obtain three values of settlements i.e., at the crown, 122
at the inverted arch, and the final settlement after full excavation. The results obtained gave significantly less error 123
values than obtained with general NN model, while the avenues for obtaining further accurate predictions were 124
offered for future developments. This work was a pioneering stepping-stone and a guide for all other 125
improvements until date. 126
127
2.2. Feed Forward Neural Networks 128
Feed Forward Neural Networks (FFNN) are the most popular type of neural networks with neurons grouped into 129
layers. The general architecture of FFNN consists of an input layer (K1 to Kn), one or more hidden layers (H1 to 130
Hk), and an output layer (O1) as shown in Fig. 3. 131
132

6
133
Fig. 2 A typical representation of the Modular Neural Network architecture 134
135
136
137
Fig. 3 A typical representation of the Artificial Neural Network (ANN) architecture 138
139

7
Data analysis carried out in the field of tunnelling uses supervised learning techniques, since the data includes 140
desired output (such as settlement magnitudes) and the influential factors. The ANN architecture mostly used for 141
supervised learning techniques is the Multi-Layer Perceptron (MLP), also known as FFNN. Kim et al. [34] 142
incorporated ANN to predict surface settlements for various tunnel sites of the Seoul subway. An attempt was 143
made to capture the rich physical characteristics fuzzily distributed in the database and, at the same time, filter 144
inherent noise in the monitored data. Based on iterative trials, a deep neural network with 47 nodes in each of 145
three hidden layers was obtained as optimal architecture. The generalization capability of the optimal model was 146
tested on two different sets of data, one comprising relatively higher values of surface settlement, while the other 147
with relatively lesser values of surface settlement. The generalization error of the model was within 16%, thereby 148
indicating appreciable generalization capability of the model. However, the capability of such models in making 149
accurate predictions purely depends on the quality and quantity of data used in training ANNs. If the data is noisy 150
or incomplete, pre-processing of the data must be done cautiously which would otherwise make the neural network 151
more sensitive to variations in input data. 152
153
Leu et al. [46] applied ANN as a data mining technique to predict the support stability status inside a tunnel. 154
Mechanical and construction related parameters, such as rock type, Rock Quality Designation (RQD), 155
underground water conditions and discontinuity attributes, are crucial in deciding the status of support stability. 156
Top heading and bench lengths had significant impact on the deformation of support systems. The outcomes 157
illustrated that the construction parameters were the more significant and dominant factors controlling the tunnel 158
stability. ANN analysis outperformed ‘cubic nonlinear regression analysis’ and ‘discriminant analysis’, and 159
proved to be statistically superior in its prediction capability. However, this work was limited to a specific 160
sedimentary sandstone rock formation and more research needs to be carried out to identify whether the 161
approaches followed herein would be suitable for other rock types and formations belonging to igneous and 162
metamorphic types. 163
164
Suwansawat and Einstein [35] applied MLP for subway tunnel data in Bangkok. Earth Pressure Balance (EPB) 165
machines, a type of TBM that was first developed in Japan, is one of the most popular technique for soft ground 166
tunnelling [52,53], and primarily used to reduce the surface settlements. ANN was used to determine the 167
correlations between TBM operational parameters, ground mass characteristics, and surface movements. The 168
researchers emphasized that one of the greatest difficulties in the analyses was obtaining all the parameters that 169

8
could be obtained through instrumentation. The difficulty in establishing a clear relationship between the 170
operational parameters and surface settlement was presented, which indicated that more than one parameter 171
influences the magnitude of surface settlements. To evaluate the performance of neural network models, network 172
architecture and epochs were varied with different combinations. Although, in general, it is considered that higher 173
number of hidden layers and hidden nodes ensures better network fit in training, it was found that the same 174
approach led to overfitting in validation phase. One important finding from this research was the effect of machine 175
type on the neural network model. Since EPB machines manufactured by different companies will not be similar, 176
an input node was added to represent the machine model. A minor improvement was achieved in both training 177
and testing samples. Qiao et al. [54] also did similar work from the data of EPB shield method and finally 178
concluded about the efficiency of ANN results over those obtained using empirical and analytical formulae. 179
180
Santos and Celestino [36] created an ANN model using the tunnel settlement data of Sao Paulo subway. The 181
geological conditions at the site, depth of tunnelling, method of tunnelling operations vary in every underground 182
excavation project. The ANN model used to predict the settlements is marked as a reference to the engineers to 183
proceed intuitively under similar conditions. It was essential to know the influence of input parameters on the 184
model output. From the literature, it was observed that most of the input parameters considered for different tunnel 185
projects are nearly similar. Suwansawat and Einstein [35] faced difficulty in establishing a distinct relationship 186
between tunnel construction advance rates and surface settlement, probably owing to the fact that the advance 187
rates were taken only at points adjacent to the instruments. Therefore, an average value of advance rates in the 188
neighbourhood of the instrument was adopted in this study. The results showed an improvement as compared to 189
previous studies. The number of scenarios, defined in order to select the best topology of neural network, plays 190
an important role in the betterment of results. In comparison to similar findings by Shi et al. [33], the results 191
exhibited improved correlation coefficients, namely 0.982 and 0.82 for training and testing datasets respectively, 192
in comparison to the earlier reported values of 0.832 and 0.57. The importance of dimensionless input was 193
highlighted by showing the improvement in the quality of results as the percentage errors dropped by 28.5% and 194
37.7% for MSE equal to 0.01 and 0.001, respectively. 195
196
Tsekouras et al. [37] compared the results obtained from FLAC 3D with that of optimized neural network model. 197
The results related to the settlement of roof and sidewalls were slightly worse than that obtained for the face 198
settlement, owing to disregarding the physical mechanism related to the occurrence of plasticity close to the roof 199
9
and walls. Hippert et al. [55] highlighted that stochastic training of the vectors is to be preferred over serial training 200
as the effect of overfitting gets suppressed in the former approach. Comparison of the two training methods 201
showed that the convergence in serial training is smoother and slower than stochastic, but the correlation 202
coefficient from serial training was excessively lesser than stochastic. The researchers also highlighted the 203
importance of final chosen input variables, and stated that the omission of a crucial input will lead to a drastic 204
decrease in the correlation coefficient. 205
206
Khatami et al. [56] created an ANN model for quick prediction of surface settlements in the preliminary stages of 207
design, particularly when twin tunnels passed below the constructed buildings. Twin tunnels are quite common in 208
urban environments [57]. Modern metro construction in congested urban areas often involves the excavation of 209
new tunnels in proximity to each other [58]. Usually, the interaction between the buildings and underlying tunnels 210
is modelled through numerical simulations. The most rigorous interaction between building and tunnel occurs 211
when the building is located at centre line of twin tunnels [59]. A very few research work is available on the 212
application of soft computing to predict settlements by considering interaction of twin tunnels and buildings. 213
Zhang and Zhang [60] reported that twin tunnelling interaction with buildings involve more parameters, and the 214
empirical methods do not account for simultaneous effect of all influential parameters [60]. In this regard, the 215
outcomes of radial basis ANN model were found to be satisfactory and very accurate prediction was produced. 216
217
2.2.1 A Review of ANN Architectures 218
ANN architectures has a wide variety of control parameters, and each of them had been suitably chosen by various 219
researchers as per the merit and requirement of the corresponding problem addressed. To predict surface 220
settlements for various tunnel sites of Seoul subway, Kim et al. [34] applied ‘Back Propagation’ (BP) algorithm, 221
based on generalized delta rule [61], because of its efficient learning procedure for multi-layer neural network. 222
An optimal ANN architecture with a 4 layer MLP having topology 47-(47-47-47)-2, with 0.1 and 0.9 as learning 223
rate and momentum terms, respectively, was obtained. Suwansawat and Einstein [35] created 18 neural network 224
models for pilot experiment to predict surface settlements for a subway tunnel in Bangkok. The training and 225
testing of ANN models were achieved by using subset of all datasets. The optimal neural architecture was obtained 226
by varying the hidden layers (1, 2), numbers of hidden nodes (10, 15, 20) and the number of training epochs. It 227
was observed that the model with largest numbers of hidden layers and hidden nodes failed to make accurate 228
predictions on the validation set. The optimal network model, with lowest RMSE, was identified with the topology 229

10
13-20-1. The efficacy of an ANN architecture is largely dependent on the methodology adopted for segregation 230
of data to be used into training, testing and validation phases. 231
232
There is a wide variety of notions existing about the segmentation of total data to be used for training, testing and 233
validation phases. To predict the penetration rate of TBM, Eftekhari et al. [62] divided the total dataset to use 75% 234
of the data for training, 15% for validation, and 10% for testing. During the training process, the most promising 235
ANN architecture was obtained to be a 2-layer FFNN with topology 9-8-1, and using ‘Tansig’ and ‘Purelin’ 236
transfer functions in the hidden and output layers, respectively. Javad and Narges [32] chose 65% data for training, 237
15% for validation and 20% for testing, and used the Levenberg-Marquardt (L-M) algorithm to train the network 238
to predict penetration rate of TBM for three different tunnel projects. The optimal network architecture was 239
obtained as a 4-layer FFNN having the topology 3-9-7-3-1, with ‘Logsig’ and ‘Purelin’ as transfer functions in 240
the hidden and output layers respectively. Rafiai and Moosavi [42] developed an ANN architecture to predict 241
convergence of lined circular tunnels. Babak et al. [29] used L-M BP algorithm, combined with Bayesian 242
regularization as training rule, due to its high generalization capability. The optimum architecture was obtained 243
as 4-layer FFNN with topology 11-7-4-2-1. In general, more hidden layers may imply more free parameters 244
leading to a higher risk of overfitting. It should be noted that increasing the number of hidden layers is necessary 245
only if it leads to higher accuracy and no loss of generality. Mahdevari et al. [41] used L-M BP algorithm to train 246
ANN for predicting tunnel convergence and selected 60% datasets for training and 20% each for validation and 247
testing. The optimum configuration of the network was dictated to be a 4 layer MLP having topology 9-35-28-1 248
with ‘Tansig’, ‘Logsig’, and ‘Purelin’ transfer functions that are used sequentially in the hidden and output layers, 249
respectively. Due to the high generalization capability, Adoko et al. [43] used L-M BP algorithm to train neural 250
network for predicting tunnel convergence. For training the network, 60% of the total dataset has been used, while 251
15-20% datasets have been used for validation and the remaining 20-25% have been used for testing. Different 252
network architectures and parameters were tested to identify the appropriate combinations. The optimum 253
configuration of model was established to be a 2 layer MLP having topology 20-26-1 with ‘Tansig’, ‘Logsig’, 254
‘Purelin’ transfer functions in hidden and output layers. Khatami et al. [56] also used L-M back propagation 255
(‘trainlm’ function) on a MatLab ANN platform to predict surface settlements for twin tunnel data. To scale the 256
inputs and targets in the range of [-1,1], a corresponding MatLab subroutine (premnmx) was used. For training, 257
83% of the total dataset was selected, while the remaining 17% datasets were preserved for testing. The optimal 258
network with lowest RMSE was found with the topology 6-15-1, with ‘Tansig’ as transfer function in hidden and 259

11
output layers. Armaghani et al. [27] utilised L-M BP algorithm to train the ANN architecture for predicting 260
penetration rate of TBM. The optimum architecture was obtained as a 2-layer network with a 7-11-1 topology. 261
From the above mentioned various architectures, it can be noted that it is very difficult to codify the exact 262
correspondence of input parameters to the numbers of input neurons, since each application calls for specific 263
network architectures. Table 1 tabulates some of the most important expressions to determine number of neurons 264
in hidden layer (Nh). In this table, 2Ni is considered as upper limit for Nh, where Ni is the number of input neurons 265
to the model. For the neural network architectures mentioned above, these equations can be considered to find 266
number of neurons for single hidden layer networks. However, for multi layered neural networks it becomes 267
difficult to decide for the number of neurons in each layer. Further, it is not necessary to have same number of 268
neurons as the number of input parameters, while the number of output neurons should be significantly less than 269
input parameters to achieve a stable well-convergent solution. 270
271
Table 1 Common expressions proposed for number of neurons in hidden layer 272
Heuristic Reference
(Ni + N0)/2 Ripley [63]
2Ni/3 Wang [64]
2Ni Kaastra and Boyd [65]
273
274
2.3. Radial Basis Functions 275
A Radial Basis Function (RBF) network is a type of feedforward neural network that learns with the aid of a 276
supervised learning technique [66]. The notable advantages of RBFs over backpropagation technique include 277
short and deterministic training time, and that the former being less prone to local minimum trapping and 278
overtraining [66]. A RBF NN model has one hidden layer with the number of hidden nodes (M), M being the only 279
parameter to define the NN model structure. Figure 4 depicts a typical RBF neural network. Lau et al. [48] applied 280
RBF neural network to predict the tunnelling production rates of successive cycles. The construction of tunnels 281
in difficult terrains, especially in terms of achieving the desired construction productivity rate (m/day), is 282
extremely challenging in any tunnel project, and often leads to financial risk and huge delays in allocation of funds 283
[67]. Geological and operational delays are considered as prime factors for the delay in productivity rates. RBF 284
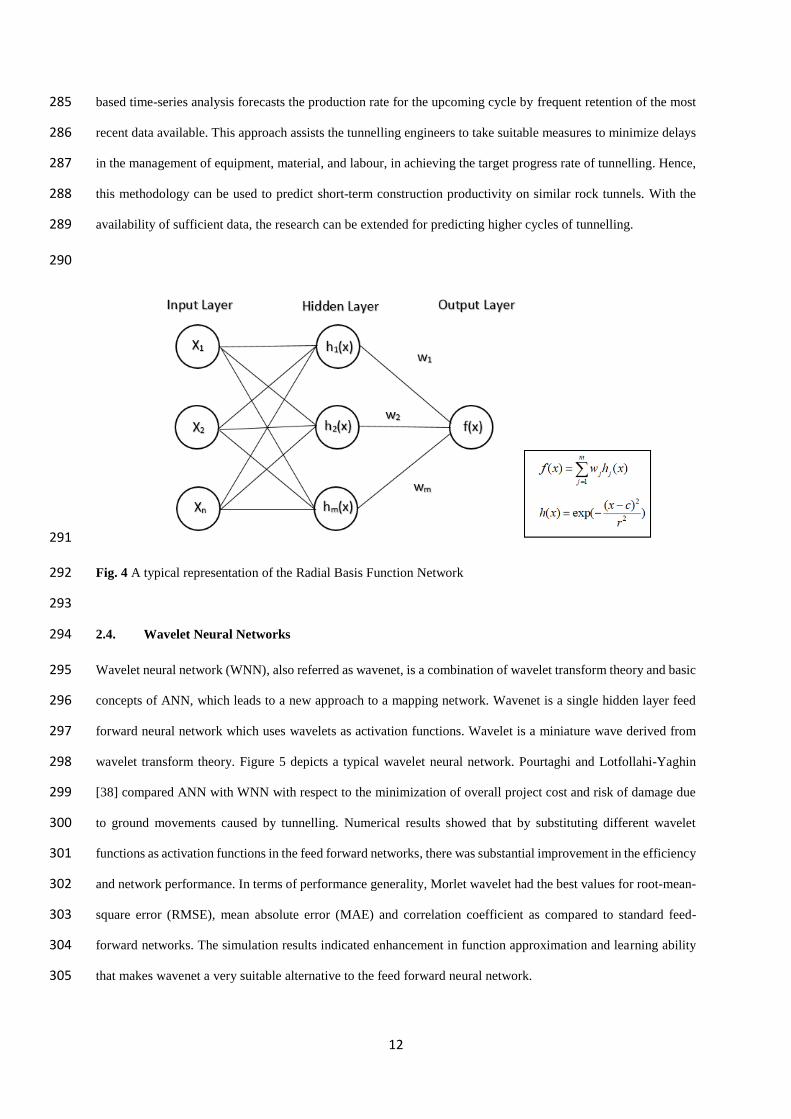
12
based time-series analysis forecasts the production rate for the upcoming cycle by frequent retention of the most 285
recent data available. This approach assists the tunnelling engineers to take suitable measures to minimize delays 286
in the management of equipment, material, and labour, in achieving the target progress rate of tunnelling. Hence, 287
this methodology can be used to predict short-term construction productivity on similar rock tunnels. With the 288
availability of sufficient data, the research can be extended for predicting higher cycles of tunnelling. 289
290
291
Fig. 4 A typical representation of the Radial Basis Function Network 292
293
2.4. Wavelet Neural Networks 294
Wavelet neural network (WNN), also referred as wavenet, is a combination of wavelet transform theory and basic 295
concepts of ANN, which leads to a new approach to a mapping network. Wavenet is a single hidden layer feed 296
forward neural network which uses wavelets as activation functions. Wavelet is a miniature wave derived from 297
wavelet transform theory. Figure 5 depicts a typical wavelet neural network. Pourtaghi and Lotfollahi-Yaghin 298
[38] compared ANN with WNN with respect to the minimization of overall project cost and risk of damage due 299
to ground movements caused by tunnelling. Numerical results showed that by substituting different wavelet 300
functions as activation functions in the feed forward networks, there was substantial improvement in the efficiency 301
and network performance. In terms of performance generality, Morlet wavelet had the best values for root-mean-302
square error (RMSE), mean absolute error (MAE) and correlation coefficient as compared to standard feed-303
forward networks. The simulation results indicated enhancement in function approximation and learning ability 304
that makes wavenet a very suitable alternative to the feed forward neural network. 305

13
306
Fig. 5 A typical representation of the Wavelet Neural Network 307
308
3. Support Vector Machines (SVMs) 309
SVM is a universal approach for solving problems of multi-dimensional function estimation and is based on 310
Vapnik-Chervonenkis (VC) theory [68]. SVM addresses both classification and regression methods. Mahdevari 311
and Torabi [41] created a neural network model using tunnel data from Ghomroud water conveyance tunnel to 312
predict tunnel convergence. Convergence is a consequence of squeezing behavior causing complete stoppage of 313
TBMs as they get stuck during excavation process. Available empirical and analytical approaches to predict 314
convergence are limited to a particular project and they cannot provide a reliable and unique solution for all 315
conditions. Moreover, these approaches fail to consider time dependent deformation, and instead, hydrostatic 316
stress is assumed for the occurrence of the squeezing mechanism. Multi variable Regression (MVR) assumes the 317
relationship between dependent and independent variables to be linear which makes it incapable to make 318
predictions when the relation is non-linear. However, in neural networks, there is no a-priori assumed relationship 319
between independent and dependent variables, where the interactions among independent variables are learnt 320
through an iterative procedure. This advantage of ANN was reflected through the obtained results which showed 321
the superiority of ANN over MVR and RBFs. The outcome of the study highlighted the applicability of neural 322
networks in predicting the tunnel convergence. However, as the phenomenon is time dependent, the gap of this 323
study is associated in disregarding the time lapse and convergence history during the modelling. To increase the 324
accuracy of results, the previous study [41] was further improvised by Mahdevari et al. [69] by the implementation 325
of SVM for prediction purposes. To obtain a good generalization ability, SVM implements Structural Risk 326

14
Minimization (SRM) principle [70]. In this technique, there are only few control parameters (the hyper 327
parameters: C is the regularization parameter, and γ is the tolerance) for optimal selection of the network 328
architecture; whereas, ANN involves many parameters (learning rate, number of epochs, batch size, momentum 329
rate, and number of hidden units), which makes optimal selection a tedious process. To obtain the convergence 330
history as observed in Ghomroud tunnel in Iran, measuring stations were placed to monitor the ground 331
displacements. This is especially necessary when NATM approach is used. In order to obtain the most stable and 332
economical lining, continual monitoring of the ground is essential. Tunnel convergence data was utilized to predict 333
the model parameters by using SVM. In comparison to the ANN, the correlation coefficient was observed to be 334
improved for both training and testing phases. A comparison on the improvement of correlation coefficient (R2) 335
is described in Fig. 6. 336
337
338
Fig. 6 Correlation coefficients of ANN and SVM on training and testing datasets 339
340
Wang et al. [71] used wavelet smooth relevance vector machines (wsRVM) model to predict settlements caused 341
by tunnelling. Relevance Vector Machine (RVM) is a competitor to SVM and is equipped by free choice of kernel 342
function, model sparsity and good generalization prediction. Smooth RVMs (sRVMs) are used to avoid 343
underftting or overfitting problems. sRVMs with wavelet kernel functions are called as wsRVM and its 344
performance has good predictive ability as compared to RVM, SVM and ANN. The proposed model can be trained 345
with very less data [71]. In case the in-situ measurements are lacking, the data generated from laboratory tests or 346
numerical simulations could suffice this problem. The future research lies in the domain of combining the 347
proposed model with existing numerical models. 348

15
AI based methods are widely used by researchers due to their suitability over empirical or experimental 349
approaches proposed to correlate TBM performance with penetration rate or advance rate. Prediction of TBM 350
performance is a nonlinear and complex problem due to various geotechnical conditions encountered along the 351
excavation alignment. SVR is capable of avoiding overfitting and local extremum problem through the principle 352
of SRM. Mahdevari et al. [72] developed a regression method based on SVR to predict penetration rate of TBM 353
in hard rock conditions. SVR uses nonlinear mapping to transform input space to higher dimensional space, and 354
then searches for nonlinear relation between the input and output data. The study achieved a coefficient of 355
determination (R2) of 0.9903 and 0.95 for training and testing datasets, respectively. From the results obtained in 356
this work, SVR is deciphered as a useful and reliable technique to predict rate of penetration. 357
358
4. Multivariate Adaptive Regression Splines (MARS) 359
Multivariate Adaptive Regression Splines (MARS) is a nonlinear and non-parametric regression method based 360
on ‘divide and conquer’ strategy in which the training data sets are partitioned into separate piecewise linear 361
segments of different gradients [73]. MARS methodology can be used when the variations between two variables 362
(input-output) has considerable scattering and linear regression fails to fit into the data accurately. Nonlinear 363
regression and non-parametric statistical methods can constitute a reliable alternative to neural networks in 364
modelling nonlinear geo-engineering problem such as tunnel convergence. Literature reveals that MARS has been 365
applied in various civil engineering fields [74-79]. 366
367
Adoko et al. [43] applied MARS method to predict tunnel convergence for a high speed railway tunnel in China 368
and compared its results with ANN predictions. Compared to ANN, the deviation from actual observed data was 369
marginally higher for MARS with coefficient of determination (R2) of 0.95 against 0.97 for ANN. Although 370
MARS slightly underperformed in terms of prediction capability, significant progress was achieved in converging 371
errors with fewer trials, which drastically reduced the processing time from 60 s for ANN to 3.5 s for MARS 372
model. It was observed that as compared to ANN, MARS requires lesser numbers of trials to select the optimal 373
model. The finding concluded that MARS is an efficient and suitable alternative to ANN in modelling non-linear 374
geo-engineering problems like tunnel convergence. The significance of utilising MARS method lies in its 375
capability to learn from training examples and capture nonlinear, complex interactions between input variables 376
and the response. Goh et al. [21] used MARS method for tunnel settlement data obtained from three separate mass 377
rapid transit projects in Singapore. The obtained tunnel data showed noticeable scattering owing to different 378

16
geological, EPB operational factors and surface settlement scenarios. The coefficient of determination was found 379
to be 0.906 and 0.721 for training and testing data, whereas the optimal ANN yielded 0.873 and 0.689 respectively. 380
This study highlighted the advantages of MARS technique over ANN, RVM and SVM in terms of computational 381
efficiency, ability in estimating contributions of input variables, and its capacity in creating simple and easily 382
interpretable models. Even though the results were satisfactory compared to ANN, still the prediction accuracy 383
remains debatable. The model uncertainty can be characterized by applying maximum likelihood based algorithms 384
or Bayesian theory. 385
386
5. Decision trees and Random Forest 387
A decision tree is a decision support tool that uses a tree like graph or model for assisting decisions [80]. The 388
decision trees are built by assuming the relationship between input features and target output as either linear or 389
non-linear, which enables to handle complex nonlinear relationships. The application of decision trees for 390
predictions is usually preferred due to their simplicity, interpretability and low computational cost. Dindarloo and 391
Irdemoosa [81] developed a classification based model to predict maximum surface settlement of shallow tunnels 392
in soft ground. The researchers prepared a generalised dataset of several case studies of tunnels constructed for 393
metro or sewer applications around the world. The decision tree classifier categorises a tunnel based on tunnel 394
geometry, ground conditions and tunneling performance characteristics. The developed model classified the 395
tunnels into four different classes based on maximum surface settlement and it can be used as a decision aid in 396
planning the preventive and corrective actions to minimize the settlements during the construction phase of 397
tunnels. 398
399
Salimi et al [82] developed a regression tree model to evaluate the impact of rock mass classification system on 400
TBM performance for two tunneling projects in Iran and India. The researchers highlight the importance of field 401
penetration index (FPI) which is useful in comparing TBM performance for tunneling works involving different 402
machine specifications. FPI (defined as the ratio of cutter force to penetration rate) demonstrates a better 403
correlation between rock mass properties and TBM performance. However, the results obtained were less accurate 404
with the correlation coefficient (R2) between measured and predicted FPI obtained as 0.69. The results indicate 405
the ability of predicting FPI based on RMR values is limited. An inclusion of diverse database of machine 406
performance could better represent the influence of rock mass properties on TBM performance. 407

17
Random Forest (RF) is a supervised learning algorithm and an ensemble of ‘Decision Trees’ that generates many 408
predictors and averages the outputs. Random Forest is very easy to use approach for both supervised (classification 409
and regression) and unsupervised learning techniques [83]. In RF regression, each tree is built using a 410
deterministic algorithm by selecting a random set of input variables and a random sample from the calibration 411
training data set. A typical schematic of RF approach is shown in Fig. 7. 412
413
Fig. 7 A typical schematic depicting the Random Forest method 414
415
Kohestani et al. [31] applied random forest method to the field measurements obtained from Bangkok subway 416
project to predict the maximum surface settlements caused by EPB shield tunnelling, and compared with the 417
results from ANN approach. Many attracting advantages of random forest over ANN could be observed from this 418
study. RF is robust against overfitting, user-friendly, less sensitive to the values of input parameters, immune to 419
irrelevant variables and outliers, and can cope with badly unbalanced data. Parameter tuning, feature selection, 420
data pre-processing (such as data normalization and centring) are not essentially required. ANN requires some 421
data pre-processing with decorrelation and normalization to increase the convergence speed of network [76]. The 422
results clearly shown random forest outperform ANN in terms of model simplicity, robustness and computational 423
efficiency. 424

18
Zhou et al. [40] also applied random forest method to predict ground settlements induced by the construction of 425
shield driven tunnel. The data was collected from several case studies of tunnelling projects in different countries. 426
Two datasets were collected from previous research [85,86] to assess the feasibility of RF. In RF, two parameters, 427
ntree (number of trees to be generated) and mtry (fraction of input variables) need to be optimised [84]. A dataset 428
used in this study [86] yielded low R2 and high RMSE values. For another relatively smaller dataset [85], high R2 429
and relatively low RMSE was observed. For any machine learning method, accuracy in predictions is highly 430
dependent on the quality and quantity of employed dataset. Larger datasets will improve model precision and 431
reliability. The results showed the capability of RF to model non-linear relationships between a set of input and 432
output variables. 433
434
6. Hybrid Intelligent Models 435
In recent years, several studies have combined neural networks with heuristic algorithms and fuzzy logic systems 436
to develop an intelligent hybrid model. These models have higher reliability and predictive power than simple 437
neural networks. Ahangari et al. [24] integrated fuzzy logic with neural networks to develop an intelligent model 438
(ANFIS) to predict tunneling induced settlements for 53 tunnels excavated using NATM (New Austrian tunneling 439
method). The predictions of intelligent model were compared with those obtained from Gene Expression 440
Programming (GEP), an algorithm based on Genetic Algorithm (GA) and Genetic Programming (GP). The 441
database was mostly scattered and a considerable gap in the range of input values was evident. The performance 442
was evaluated in terms of Multi-Objective Error (MOE) which is a combination of relative RMSE (RRMSE) and 443
correlation coefficient (R2). ANFIS model showed very poor prediction results for higher values of settlements. 444
However, the equations obtained through GEP method to predict settlement are found to be more appropriate than 445
ANFIS models. The equations obtained from GEP are very robust in estimating higher settlement values and it 446
out-performed the ANFIS-based predictions. 447
448
Yagiz and Karahan [28] made the first attempt by using Hybrid Harmony Search-Broyden Fletcher Goldfarb 449
Shanno (HHS-BFGS), Differential evolution (DE), and Grey Wolf Optimizer (GWO) algorithms to predict the 450
penetration rate of TBM used in Queens Water Tunnel, USA. Interestingly, it was observed that there is no salient 451
difference between the models according to the R2 values. The difference in usage of different algorithms is mainly 452
attributed to computational time and efficiency. HS-BFGS model obtained high precision solutions in less CPU 453

19
times and with lesser numbers of function evaluations, thereby indicating that HS-BFGS converges faster than 454
other models. The GWO showed poor performance in terms of function evaluations which reached maximum 455
iterations, but still could not satisfy the stopping criterion. However, it can be emphasized that optimization 456
techniques are superior to automated learning models like ANN and Fuzzy Logic as they cannot develop any 457
easily recognizable and readily workable expressions and formulas. 458
459
Armaghani et al. [27] developed two hybrid intelligent models to predict penetration rate (PR) of TBM used in 460
Pahang Selangor Raw Water Transfer (PSRWT) tunnel in Malaysia. This was one of the first attempts made to 461
predict penetration rate of TBM using heuristic algorithms. As has been elucidated, the accuracy of results largely 462
depends on the size of training dataset [39]. The database used in the study [27] is extremely large, consisting of 463
1286 samples. The neural network is trained with two heuristic algorithms namely, Particle Swarm Optimization 464
(PSO) and Imperialist Competitive Algorithm (ICA) to develop PSO-ANN and ICA-ANN hybrid models, which 465
are thereby compared to select the best model for prediction of TBM PR. It is observed that performance indices 466
from ICA-ANN technique is slightly higher than PSO-ANN technique. However, both hybrid models out-467
performed ordinary FFNN approach. 468
469
Moghaddasi and Bidgoli [39] developed a hybrid model to predict surface settlements caused by tunneling for 470
Line No. 2 of Karaj subway, Iran. The neural network was trained with Imperialist Competitive Algorithm (ICA), 471
a global population based heuristic algorithm inspired by human social evolution. The optimal values of ICA 472
parameters (number of countries, number of imperialists, number of decades) were chosen as per the suggestions 473
from previous researches [87,88]. The results when compared with ANN and MVR showed the superiority of 474
ICA-ANN model based on performance indices, namely R2, RMSE, and VAF (Variance Account For). It was 475
observed that the performance enhancement is an outcome of obtaining desirable values of weights and biases 476
without trapping in local optimum. However, it is important to note that developed models are specific to the 477
considered site and application of these models in other regions need required modifications based on specific site 478
conditions for which it can be applied. 479
480
481
482

20
Table 2 Application of soft computing techniques in tunnelling problems 483
LITERATURE TECHNIQUE OUTPUT DESCRIPTION
Adoko et al. [100] ANFIS Cumulative
convergence
135 datasets collected from
construction site, Hunan
province, China
Adoko et al. [43] ANN, MARS Cumulative
convergence
486 datasets from tunnel site,
Hunan province, China
Ahangari et al. [99] ANFIS, GEP Settlement Using data obtained from 53
tunnels all over the world
Armaghani et al. [27] ICA, PSO Penetration Rate
1286 samples of data from
water transfer tunnel in
Malaysia
Benardos and Kaliampakos [44] ANN Advance Rate
Data collected from
interstation section of Athens
metro tunnel
Eftekhari et al. [62] ANN Penetration Rate Using 10 km data excavated in
Zagros Tunnel, Iran
Javad and Narges [45] ANN Penetration Rate
185 datasets collected from
three tunnel projects in USA,
Ethiopia, Iran
Goh et al. [21] ANN, MARS Settlement Using 148 datasets from three
different projects in Singapore
Khatami et al. [56] ANN Settlement 160 samples of data collected
from Shiraz metro line 1, Iran
Mahdevari and Torabi [41] ANN, SVM Cumulative
convergence
Using 60 datasets collected
from Ghomroud water
conveyance tunnel, Iran
Mahdevari et al. [69] SVM Cumulative
convergence
Data collected from Amir
Kabir underpass tunnel,
Tehran
Mahdevari et al. [72] SVR Penetration Rate 150 samples of data from the
Queens Water Tunnel, USA
Moghaddasi and Bidgoli [39] ICA Settlement Using 143 datasets collected
from Karaj subway, Iran
Neaupane and Adhikari [86] ANN Settlement Using 40 datasets from tunnel
projects of different countries
Pourtaghi and Lotfollahi-Yaghin
[38] WNN Settlement
Using 49 samples of data from
Bangkok subway project
Qiao et al. [54] ANN Settlement Using 41 samples of data from
Shanghai LRT line 2 project
Suwansawat and Einstein [35] ANN Settlement Using 49 samples of data from
Bangkok subway project
Yagiz and Karahan [28] DE, HS-BFGS,
GWO Penetration Rate
Using the database collected
from the Queens Water
Tunnel, USA
484
485

21
7. SHORTCOMINGS OF SOFT COMPUTING METHODS 486
In the earlier sections, a critical review is provided for several soft computing methods like ANN, SVM, MARS 487
and RF. Table 2 provides a list of researches employing various techniques of soft computing in assessing and 488
predicting the behaviour of tunnels in terms of their settlement and convergence, as well as in terms of the 489
penetration and advance rates of TBMs. Each of these methods have their inherent limitations, which gives the 490
scope to proceed further with their fundamentals as well as their application. In this section, the limitations 491
suffered by various soft computing methods is briefed. The lack of transparency is the key issue that led to major 492
criticism on ANNs, which made them refer as ‘Black Box’ models, as they failed to consider or explain about the 493
underlying physical processes. They do not perform well when they have to extrapolate beyond the range of the 494
data used for calibration [89]. As function approximation tools, neural networks will not impose any limitation on 495
the final solution. All the primary limitations emerge from the data used for training the network. The network 496
training occurs even if data inefficiency prevails and ultimately it leads to convergence, which may not be 497
accurate. In such cases, there will be extremely retarding match between the validations and training results, 498
leading to large deviation. Despite its versatility, slow learning rate of ANN will consume more computational 499
time and is more prone to converge into local minima. There is no well-defined algorithm for determining optimal 500
number of hidden nodes, although some researchers proposed some equations to choose the number of hidden 501
nodes [63-65]. Because of these limitations, simple ANN models are not found to be very suitable to predict the 502
parameters in tunnelling and underground excavations. 503
504
SVM determines the parameters only for given value of regularization and kernel functions. It translates the 505
problem of overfitting from optimising the parameters to model selection. The kernel models could be quite 506
sensitive to overfitting the model selection criteria. Most of the other machine learning methods suffer from similar 507
problems. MARS is not a good technique to choose for prediction when there are chances of missing data. The 508
said technique is more difficult to understand and interpret than other methods; despite its complexity, it is a quite 509
efficient and fast algorithm. Similar to neural networks, even MARS is susceptible to overfitting. Because of these 510
reasons, MARS is not frequently used in the context of tunnelling, as it is difficult to make sure whether the data 511
is pristine and coming from a consistent source. From the research conducted using MARS technique, 512
preconceived conclusions cannot be made about the accuracy of this technique. RF is mostly case-dependent and 513
is precise only in the range of training data. The black-box nature of the method prohibits easy interpretation of 514
the relationships between the response and predictor variables, and the data are often overfitted. 515

22
516
Some of the common problems suffered by any machine learning methods are underfitting, overfitting, and 517
trapping in local minima. Underfitting is comparatively observed lesser than overfitting in machine learning 518
models. Specifically, underfitting occurs when the model or algorithm shows low variance but high bias. They 519
can neither model the training data nor generalise to new data. It is often a result of excessively simple model. 520
Such models does not possess the capability to capture the underlying trend of the data. Underfitting is often 521
encountered when there is insufficient data and several features are used during training the model. There are 522
several techniques available to remove redundant features, namely Principal Component Analysis (PCA) and 523
Univariate Selection. In most cases, underfitting is observed when linear model is fitted for a non-linear data. In 524
such cases, different ML algorithms have to be applied to avoid this problem. Overfitting occurs when the ML 525
algorithm captures noise in the training data to the extent that it negatively impacts the performance of the model 526
on new data. The noise or random fluctuations in training data is learnt as concepts by the model. In general, non-527
parametric and non-linear models (decision trees) are more susceptible to overfitting due to their flexibility in 528
learning a target function. Over fitting can be controlled by re-sampling techniques such as k-fold cross validation. 529
The model is trained and tested for k-times on different subsets of training data and the performance of the model 530
is estimated on unseen data. Overfitting can be limited by preserving a validation set extracted as a subset of 531
training data. The ML algorithm is initially tuned on training data and is evaluated on the validation dataset to 532
assess the performance on unseen data. 533
534
The error metrics used to evaluate the performance of machine learning models suffer from several drawbacks. 535
MSE and RMSE have low reliability: the results could be different depending on different fraction of data [90]. 536
The RMSE is sensitive to outliers and the errors will not converge to specified tolerance limits. In many cases, 537
the ‘number of epochs’ is used as a termination criteria when the desired network correlation (R2) and minimum 538
RMSE are not achieved [91]. Usage of a single error metric provides only one projection of model error, and 539
therefore, only emphasizes certain aspect of the error characteristics [92]. A combination of metrics such as Mean 540
Absolute Percentage Error (MAPE), Variance Accounted For (VAF), and Mean Squared Deviation (MSD) are 541
often required to assess model performance [93]. The gradient descent algorithms like back propagation (BP) are 542
widely used to optimise the error function in neural networks. However, BP is a local-search learning algorithm, 543
and as a result, the optimum search process of ANN using BP may fail and return unsatisfied solutions [94]. 544
Normally, at a local minimum, there is more probability of convergence if simple ANN models are used. Several 545

23
researchers combined ANN and heuristic algorithms called hybrid methods and successfully optimised the 546
weights and biases of ANN [95,96]. The heuristic algorithms search for global minimum and further employ ANN 547
to find the best results for the system [27]. Tuning the hyper-parameters of neural network such as increasing the 548
learning rate, increasing hidden layers/units, trying different combinations of activation functions and 549
optimization algorithms can prevent the model from trapping in local minima. Moreover, there are many sources 550
addressing the solutions for local minima problem [97,98]. In soft computing, tuning model’s hyper parameters 551
i.e., finding the best combination of parameters (number of trees in random forest, number of hidden layers in 552
neural network) is a complicated task. There are several algorithms available for optimization of hyper-parameters 553
and the most frequently used are ‘grid search’ and ‘random search’ methods. Grid search suffers from issue of 554
dimensionality i.e. the number of evaluations of the model grows exponentially with the number of parameters to 555
be tuned. Random search results in a high variance model as the search for best hyper parameters is entirely 556
random. Intelligent methods such as simulated annealing, genetic algorithm, Bayesian optimization can produce 557
better performance than grid search and random search approaches. 558
559
8. CRITICAL APPRAISAL AND CONCLUSIONS 560
Although significant improvements on the application of Artificial Intelligence in the field of tunnelling and 561
underground excavation have been made over recent years, this article provides a critical understanding to the 562
available state of art on this topic. Based on the available literature, it is found that more research has been focussed 563
in predicting surface settlements, convergence behaviour inside tunnels and predicting TBM performance. The 564
researchers faced difficulty due to overfitting of the data, attributed to poor generalization of neural network 565
models. As there is no suitable guideline in selecting the optimal ANN model, several methods are implemented 566
to overcome the limitation to prediction accuracy of feed forward neural networks. Multi Variable Regression 567
(MVR) is the least accurate method available for prediction. SVM has shown better results than MLP and RBF, 568
but, in recent works, RVM has established itself to be a competitor to SVM. SVM and MARS techniques. 569
Although SVM have helped achieving computational efficiency due to robustness of the algorithm, its limited 570
applicability makes the problem more challenging. RF method has outperformed ANN in terms of computational 571
complexity, robustness and model simplicity. The results from the case studies highlight the applicability of RF 572
in predicting surface settlements and indicated that the performance of ANN models can be improved further by 573
using ensemble methods. The prediction accuracy of the network model will depend on the quality and quantity 574
of the data collected. Therefore, if sufficient in-situ measurements are not available, then laboratory test or 575

24
numerical model data can be looked upon for aid in sufficing the limited field data. Since the results obtained in 576
soft computing are completely dependent on the quality and the range of the input data fed to the network, 577
normalization of the input data will not suffice. Much attention has not yet been given to improve the input data 578
quality that would otherwise can yield a robust model. Model robustness, transparency, knowledge extraction, 579
extrapolation and uncertainty are the issues requiring future attention. Computational complexity of ANN should 580
be reduced to make it more efficient. The main problem in using ANN is parameter tuning because there is no 581
definite and explicit method to select optimal parameters. In recent years, using ANN alone has suffered a setback 582
considering its own limitations. The prejudice opinion inclines to recommend optimisation algorithms clubbed 583
with ANN. Bayesian updating scheme can emerge as a better alternative to ANN and MARS techniques in 584
predicting the surface settlements caused by tunnelling. Self-organising maps (SOM) of neural networks can be 585
used to reduce the mean square error and improve the quality of training the network. However, it should be noted 586
that reducing MSE should not be the only goal; equal significance must be given in finding the global optimum. 587
Hybrid optimisation techniques like Particle Swarm Optimisation (PSO), Hybrid Harmony Search (HHS), Grey 588
Wolf Optimiser (GW), Imperialist Competitive Algorithms (ICA), and Genetic algorithms (GA) are found to be 589
capable in solving several geotechnical problems. The solution converges to a global optimum in lesser number 590
of iterations when machine-learning methods are combined with hybrid optimisation techniques. The future trends 591
should orient towards using nature inspired optimization algorithms namely Bat Algorithm (BA), Artificial Bee-592
colony Algorithm (ABC), and Firefly Algorithm, which have proved their efficacy in many other engineering 593
fields. These methods express their capabilities to attain a global optimum, which can be aptly applied to any 594
optimization problems solved by GA and PSO. Hence, it is recommended that the future trend in the application 595
of soft computing in tunnelling and underground constructions should be more focused in developing and using 596
robust and self-sustaining algorithms to capture the complexity and nonlinearity of the problem. At the same time, 597
it is also to be noted that these methods being dependent on the quality and quantity of data, sufficient field and 598
laboratory data would be required for the evolution of these methods to better applicability. 599
600
ACKNOWLEDGMENTS 601
The authors whole-heartedly thank the reviewers, whose comments have aided in substantial improvement of the 602
manuscript. 603
604

25
References 605
1. Saxena, S. C., (2015). Tunnel Engineering. Dhanpat Rai and Sons, New Delhi. 606
2. Goodman, R. E., (1989). Introduction to Rock Mechanics. Second edition, John Wiley and Sons, New York. 607
3. Peck, R.B., (1969). Advantages and limitations of the observational method in applied soil mechanics. 608
Geotechnique. 19(2), 171-187. http://dx.doi.org/10.1680/geot.1969.19.2.171 609
4. Atkinson, J.H., Potts, D.M., (1977). Subsidence above shallow tunnels in soft ground. Journal of 610
Geotechnical and Geoenvironmental Engineering, ASCE. 103(4), 307–325. 611
5. Clough, W., Schmidt, B., (1981). Design and performance of excavations and tunnels in soft clay. Soft Clay 612
Engineering, eds. E. W. Brand and R. P. Brenner, Elsevier. 100–104. 613
6. Moh, Z.C., Daniel, H.J., Hwang, R.N., (1996). Ground movements around tunnels in soft ground. In: Proc. 614
of International Symposium on Geotechnical Aspects of Underground Construction in Soft Ground, London. 615
725-730. 616
7. Fenner, R., (1938). Untersuchungen zur Erkenntnis des Gebirgsdruks. Glückauf. 74, 681–685. 617
8. Hoek, E., Brown, E.T., (1980). Underground Excavations in Rock. E&FN Spon Press for the Institution of 618
Mining and Metallurgy, London. 619
9. Einstein, H.H., Schwartz, C.W., (1979). Simplified analysis for tunnel supports. Journal of the Geotechnical 620
Engineering Division, ASCE. 105(4), 499–518. 621
10. Park, K., (2004). Elastic solution for tunneling-induced ground movements in clays. International Journal of 622
Geomechanics, ASCE. 4(4), 310–318. https://doi.org/10.1061/(ASCE)1532-3641(2004)4:4(310) 623
11. Franzius J.N., Potts D.M., Burland J.B., (2005). The influence of soil anisotropy and K0 on ground surface 624
movements resulting from tunnel excavation. Geotechnique. 55(3), 189-99. 625
https://doi.org/10.1680/geot.2005.55.3.189 626
12. Swoboda, G., Abu-Krisha, A., (1999). Three dimensional numerical modeling for TBM tunneling in 627
consolidated clay. Tunnelling and Underground Space Technology. 14(3), 327–333 628
13. Addenbrooke, T.I., Potts, D.M., (2001). Finite element analysis of St. James Park greenfield reference site. 629
In: Burland JB, Standing JR, Jardine FM (eds) Building response to tunnelling, Vol 1. Telford, London, pp 630
177–194 631
14. Mroueh, H., Shahrour, I., (2002). Three-dimensional finite element analysis of the interaction between 632
tunneling and pile foundations. International Journal for Numerical and Analytical methods in 633
Geomechanics. 26, 217–230. https://doi.org/10.1002/nag.194 634
26
15. Kasper, T., Meschke, G., (2006). A numerical study of the effect of soil and grout materiel properties and 635
cover depth in shield tunneling. Computers and Geotechnics. 33(4-5), 234–247. 636
http://dx.doi.org/10.1016/j.compgeo.2006.04.004 637
16. Lambrughi, A., Rodriguez, L., Castellanza, R., (2012). Development and validation of a 3D numerical model 638
for TBM-EPB mechanised excavations. Computers and Geotechnics. 40, 97–113. 639
https://doi.org/10.1016/j.compgeo.2011.10.004 640
17. Gong, W., Luo, Z., Juang, C.H., Huang, H., Zhang, J., Wang, L., (2014). Optimization of site exploration 641
program for improved prediction of tunneling induced ground settlement in clays. Computers and 642
Geotechnics. 56, 69–79. http://dx.doi.org/10.1016/j.compgeo.2013.10.008 643
18. Huang, H., Gong, W., Khoshnevisan, S., Juang, C.H., Zhang, D., Wang, L., (2015). Simplified procedure 644
for finite element analysis of the longitudinal performance of shield tunnels considering spatial soil 645
variability in longitudinal direction. Computers and Geotechnics. 64, 132–145. 646
https://doi.org/10.1016/j.compgeo.2014.11.010 647
19. Maji, V.B., Adugna, A., (2016). Numerical modelling of tunnelling induced ground deformation and its 648
control. International Journal of Mining and Geo-engineering. 50(2), 183–188. 649
https://doi.org/10.22059/ijmge.2016.59827 650
20. Do, N. A., Dias, D., Oreste, P., Djeran-Maigre, I. (2014). Three-dimensional numerical simulation for 651
mechanized tunnelling in soft ground: the influence of the joint pattern. Acta Geotechnica. 9, 673–694. 652
https://doi.org/10.1007/s11440-013-0279-7 653
21. Goh, A.T.C., Zhang, W., Zhang, Y., Xiao, Y., Xiang, Y., (2018). Determination of earth pressure balance 654
tunnel-related maximum surface settlement: A multivariate adaptive regression splines approach. Bulletin 655
of Engineering Geology and the Environment. 77(2), 489–500. https://doi.org/10.1007/s10064-016-0937-8 656
22. Karakus, M., Fowell, R.J., (2003). Effects of different tunnel face advance excavation on the settlement by 657
FEM. Tunnelling and Underground Space Technology. 18, 513–523. http://dx.doi.org/10.1016/S0886-658
7798(03)00068-3 659
23. Karakus, M., Fowell, R.J., (2005). Back analysis for tunnelling induced ground movements and stress 660
redistribution. Tunnelling and Underground Space Technology. 20, 514–524. 661
http://dx.doi.org/10.1016/j.tust.2005.02.007 662
27
24. Ahangari, K., Moeinossadat, S.R., Behnia, D., (2015). Estimation of tunnelling-induced settlement by 663
modern intelligent methods. Soils and Foundations. 55(4), 737-748. 664
https://doi.org/10.1016/j.sandf.2015.06.006 665
25. Bouayad, D., Emeriault, F., (2017). Modeling the relationship between ground surface settlements induced 666
by shield tunneling and the operational and geological parameters based on the hybrid PCA / ANFIS method. 667
Tunnelling and Underground Space Technology. 68, 142–152. https://doi.org/10.1016/j.tust.2017.03.011 668
26. Hou, J., Zhang, M.X., Tu, M., (2009). Prediction of surface settlements induced by shield tunneling: An 669
ANFIS model. Taylor & Francis Group, London: 551–554. 670
27. Armaghani, D.J., Mohamad, E.T., Narayanasamy, M.S., Narita, N., Yagiz, S., (2017). Development of 671
hybrid intelligent models for predicting TBM penetration rate in hard rock condition. Tunnelling and 672
Underground Space Technology. 63, 29-43. https://doi.org/10.1016/j.tust.2016.12.009 673
28. Yagiz, S., Karahan, H., (2015). Application of various optimization techniques and comparison of their 674
performances for predicting TBM penetration rate in rock mass. International Journal of Rock Mechanics 675
and Mining Sciences. 80, 308–315. https://doi.org/10.1016/j.ijrmms.2015.09.019 676
29. Ashrafi, S. B., Anemangely, M., Sabah, M., Ameri, M. J. (2019). Application of hybrid artificial neural 677
networks for predicting rate of penetration (ROP): A case study from Marun oil field. Journal of Petroleum 678
Science and Engineering. 175, 604–623. https://doi.org/10.1016/j.petrol.2018.12.013 679
30. Gao, X., Shi, M., Song, X., Zhang, C., Zhang, H., (2019). Recurrent neural networks for real-time prediction 680
of TBM operating parameters. Automation in Construction. 98, 225–235. 681
https://doi.org/10.1016/j.autcon.2018.11.013 682
31. Kohestani, V.R., Bazargan-Lari, M.R., Asgari-Marnani, J., (2017). Prediction of maximum surface 683
settlement caused by earth pressure balance shield tunnelling using random forest. Journal of AI and Data 684
Mining. 5(1), 127–135. https://doi.org/10.22044/jadm.2016.748 685
32. Qi, C., Fourie, A., Zhao, X., (2018). Back-analysis method for stope displacements using gradient-boosted 686
regression tree and firefly algorithm. Journal of Computing in Civil Engineering. 32, 1–10. 687
https://doi.org/10.1061/(ASCE)CP.1943-5487.0000779. 688
33. Shi, J., Ortigao, J.A.R., Bai, J., (1998). Modular neural networks for predicting settlements during tunnelling. 689
Journal of Geotechnical and Geoenvironmental Engineering, ASCE. 124(5), 389–395. 690
https://doi.org/10.1061/(ASCE)1090-0241(1998)124:5(389) 691

28
34. Kim, C.Y., Bae, G.J., Hong, S.W., Park, C.H., Moon, H.K., Shin, H.S., (2001). Neural network based 692
prediction of ground surface settlements due to tunnelling. Computers and Geotechnics. 28(6-7), 517–547. 693
https://doi.org/10.1016/S0266-352X(01)00011-8 694
35. Suwansawat, S., Einstein, H.H., (2006). Artificial neural networks for predicting the maximum surface 695
settlement caused by EPB shield tunneling. Tunnelling and Underground Space Technology. 21(2), 133–696
150. https://doi.org/10.1016/j.tust.2005.06.007 697
36. Santos, O.J., Celestino, T.B., (2008). Artificial neural networks analysis of São Paulo subway tunnel 698
settlement data. Tunnelling and Underground Space Technology. 23(5), 481–491. 699
http://dx.doi.org/10.1016/j.tust.2007.07.002 700
37. Tsekouras, G.J., Koukoulis, J., Mastorakis, N.E., (2010). An optimized neural network for predicting 701
settlements during tunneling excavation. WSEAS Transaction on Systems. 9(12), 1153-1167. 702
38. Pourtaghi, A., Lotfollahi-Yaghin, M.A., (2012). Wavenet ability assessment in comparison to ANN for 703
predicting the maximum surface settlement caused by tunneling. Tunnelling and Underground Space 704
Technology. 28, 257–271. https://doi.org/10.1016/j.tust.2011.11.008 705
39. Moghaddasi, M.R., Noorian-Bidgoli, M., (2018). ICA-ANN, ANN and multiple regression models for 706
prediction of surface settlement caused by tunneling. Tunnelling and Underground Space Technology. 79, 707
197–209. https://doi.org/10.1016/j.tust.2018.04.016 708
40. Zhou, J., Shi, X., Du, K., Qiu, X., Li, X., Mitri, H.S., (2017). Feasibility of random-forest approach for 709
prediction of ground settlements induced by the construction of a shield-driven tunnel. International Journal 710
of Geomechanics, ASCE. 17(6), 04016129-1-12. https://doi.org/10.1061/(ASCE)GM.1943-5622.0000817 711
41. Mahdevari, S., Torabi, S.R., (2012). Prediction of tunnel convergence using Artificial Neural Networks. 712
Tunnelling and Underground Space Technology. 28, 218–228. https://doi.org/10.1016/j.tust.2011.11.002 713
42. Rafiai, H., Moosavi, M., (2012). An approximate ANN-based solution for convergence of lined circular 714
tunnels in elasto-plastic rock masses with anisotropic stresses. Tunnelling and Underground Space 715
Technology. 27(1), 52–59. https://doi.org/10.1016/j.tust.2011.06.008 716
43. Adoko, A.C., Jiao, Y.Y., Wu, L., Wang, H., Wang, Z.H., (2013). Predicting tunnel convergence using 717
Multivariate Adaptive Regression Spline and Artificial Neural Network. Tunnelling and Underground Space 718
Technology. 38, 368–376. https://doi.org/10.1016/j.tust.2013.07.023 719
44. Benardos, A.G., Kaliampakos, D.C., (2004). Modelling TBM performance with artificial neural networks. 720
Tunnelling and Underground Space Technology. 19(6), 597–605. https://doi.org/10.1016/j.tust.2004.02.128 721

29
45. Javad, G., Narges, T., (2010). Application of artificial neural networks to the prediction of tunnel boring 722
machine penetration rate. Mining Science and Technology (China). 20(5), 727–733. 723
https://doi.org/10.1016/S1674-5264(09)60271-4 724
46. Leu, S.S., Chen, C.N., Chang, S.L., (2001). Data mining for tunnel support stability: Neural network 725
approach. Automation in Construction. 10, 429–441. https://doi.org/10.1016/S0926-5805(00)00078-9 726
47. Lee, C., Sterling, R. (1992). Identifying probable failure modes for underground openings using a neural 727
network. International Journal of Rock Mechanics and Mining Sciences Abstracts. 29(1), 49–67. 728
https://doi.org/10.1016/0148-9062(92)91044-6 729
48. Lau, S., Lu, M., Ariaratnam, S.T., (2010). Applying radial basis function neural networks to estimate next-730
cycle production rates in tunnelling construction. Tunnelling and Underground Space Technology. 25, 357–731
365. https://doi.org/10.1016/j.tust.2010.01.010 732
49. Almasri, M.N., Kaluarachchi, J.J., (2005). Modular neural networks to predict the nitrate distribution in 733
ground water using the on-ground nitrogen loading and recharge data. Environmental Modeling and 734
Software. 20. https://doi.org/10.1016/j.envsoft.2004.05.001 735
50. NeuralWare, (2000). Neural Computing, Using NeuralWorks, and Reference Guide. NeuralWare, 736
Pittsburgh, PA. 737
51. Azam, F., (2000). Biologically inspired modular neural networks. Ph.D. Handbook, Virginia Polytechnic 738
Institute and State University. 739
52. Stack, B., (1982). Handbook of Mining and Tunnelling Machinery. John Wiley & Sons, New York. 740
53. Maidl, B., Herrenknecht, M., Anheuser, L., (1996). Mechanised Shield Tunnelling. Ernst & Sohn, Berlin. 741
54. Qiao, J., Liu, J., Guo, W., Zhang, Y., (2010). Artificial neural network to predict the surface maximum 742
settlement by shield tunnelling. in: Liu, H., Ding, H., Xiong, Z., Zhu, X. (Eds.), Intelligent Robotics and 743
Applications. ICIRA 2010. Lecture Notes in Computer Science, Vol 6424. Springer, Berlin Heidelberg, pp. 744
257–265. https://doi.org/10.1007/978-3-642-16584-9_24 745
55. Hippert, H.S., Pedreira, C.E., Souza, R.C., (2001). Neural networks for short-term load forecasting: A review 746
and evaluation. IEEE Transactions on Power Systems, 16(1), 44-55. 747
https://doi.org/10.1016/j.tust.2011.12.00910.1109/59.910780 748
56. Khatami, S.A., Mirhabibi, A., Khosravi, A., Nahavandi, S., (2013). Artificial neural network analysis of twin 749
tunnelling-induced ground settlements. In: Proceedings of IEEE International Conference on Systems, Man 750
and Cybernetics. 2492–2497. https://doi.org/10.1109/SMC.2013.425 751

30
57. Addenbrooke, T.I., Potts, D.M., (1996). Twin tunnel construction - Ground movements and lining behaviour. 752
Proceedings of the Geotechnical Aspects of Underground construction in Soft Ground, Rotterdam, Balkema. 753
441–446. 754
58. Mirhabibi, A., Soroush, A., (2012). Effects of surface buildings on twin tunnelling-induced ground 755
settlements. Tunnelling and Underground Space Technology. 29, 40-51. 756
https://doi.org/10.1016/j.tust.2011.12.009 757
59. Mirhabibi, A., (2012). Numerical Analysis of Tunnelling-Induced Settlements of Surface Structures due to 758
Twin Tunnel Construction in Soils, Ph.D. Handbook, Amir Kabir University. 759
60. Zhang, A., Zhang, L. (2004). RBF neural networks for the prediction of building interference effects. 760
Computers and Structures. 82(27), 2333–2339. https://doi.org/10.1016/j.compstruc.2004.05.014 761
61. Rumelhart D.E., MacClelland J.L., (1986). Parallel Distributed Processing. Bradford, MIT. 762
62. Eftekhari, M., Baghbanan, A., Bayati, M., (2010). Predicting penetration rate of a tunnel boring machine 763
using artificial neural network. In: Proceedings of the ISRM International Symposium and 6th Asian Rock 764
Mechanics Symposium – Advances in Rock Engineering, New Delhi, India. 765
63. Ripley, B.D., (1993). Statistical aspects of neural networks. In: Barndoff- Neilsen, O.E., Jensen, J.L., 766
Kendall, W.S. (Eds.), Networks and Chaos-Statistical and Probabilistic Aspects. Chapman & Hall, London, 767
pp. 40–123. 768
64. Wang, C., (1994). A Theory of Generalization in Learning Machines with Neural Application. PhD Thesis. 769
The University of Pennsylvania, USA. 770
65. Kaastra, I., Boyd, M., (1996). Designing a neural network for forecasting financial and economic time series. 771
Neurocomputing. 10, 215–236. 772
66. Haykin, S., (2004). Neural Networks – A Comprehensive Foundation. Prentice-Hall. 773
67. Duddeck, H., (1996). Challenges to tunnelling engineers. Tunnelling and Underground Space Technology. 774
11(1), 5–10. https://doi.org/10.1016/0886-7798(96)84164-2 775
68. Vapnik, V., Golowich, S., Smola, A., (1997). Support vector method for function approximation, regression 776
estimation, and signal processing. In: Mozer, M.C., Jordan, M.I., Petsche, T. (Eds.), Advances In Neural 777
Information Processing Systems. Vol. 9. Cambridge: MIT Press. 281–287. 778
69. Mahdevari, S., Torabi, S.R., Monjezi, M., (2012). Application of artificial intelligence algorithms in 779
predicting tunnel convergence to avoid TBM jamming phenomenon. International Journal of Rock 780
Mechanics and Mining Sciences. 55, 33–44. https://doi.org/10.1016/j.ijrmms.2012.06.005 781

31
70. Basak D., Pal S., Patranabis D.C., (2007). Support vector regression. Neural Information Process—Letters 782
and Reviews. 11(10), 203-224. 783
71. Wang, F., Gou, B., Qin, Y., (2013). Modelling tunneling-induced ground surface settlement development 784
using a wavelet smooth relevance vector machine. Computers and Geotechnics. 54, 125–132. 785
https://doi.org/10.1016/j.compgeo.2013.07.004 786
72. Mahdevari, S., Shahriar, K., Yagiz, S., Akbarpour Shirazi, M., (2014). A support vector regression model 787
for predicting tunnel boring machine penetration rates. International Journal of Rock Mechanics and Mining 788
Sciences. 72, 214–229. https://doi.org/10.1016/j.ijrmms.2014.09.012 789
73. Friedman, J. (1991). Multivariate adaptive regression splines. Annals of Statistics. 19, 1-67. 790
74. Lashkari, A., (2013). Prediction of the shaft resistance of non-displacement piles in sand. International 791
Journal for Numerical and Analytical Methods in Geomechanics. 37, 904–931. 792
https://doi.org/10.1002/nag.1129 793
75. Attoh-Okine, N.O., Cooger, K., Mensah, S., (2009). Multivariate adaptive regression spline (MARS) and 794
hinged hyper planes (HHP) for doweled pavement performance modelling. Construction and Building 795
Materials. 23, 3020–3023. http://dx.doi.org/10.1016/j.conbuildmat.2009.04.010 796
76. Samui, P., Das, S.K., Kim, D., (2011). Uplift capacity of suction caisson in clay using multivariate adaptive 797
regression spline. Ocean Engineering. 38(17–18), 2123-2127. 798
https://doi.org/10.1016/j.oceaneng.2011.09.036 799
77. Samui, P., Karup, P., (2011). Multivariate adaptive regression spline and least square support vector machine 800
for prediction of undrained shear strength of clay. International Journal of Applied Metaheuristic Computing. 801
3(2), 33–42. https://doi.org/10.4018/jamc.2012040103 802
78. Zhang, W.G., Goh, A.T.C., (2013). Multivariate adaptive regression splines for analysis of geotechnical 803
engineering systems. Computers and Geotechnics. 48, 82–95. 804
https://doi.org/10.1016/j.compgeo.2012.09.016 805
79. Zhang, W.G., Zhang, R., Goh, A.T.C. (2018). Multivariate Adaptive Regression Splines Approach to 806
estimate lateral wall deflection profiles caused by braced excavations in clays. Geotechnical and Geological 807
Engineering. 36: 1349-1363. 808
80. Friedman, J., T. Hastie, and R. Tibshirani., (2001). The elements of statistical learning. New York: Springer. 809

32
81. Dindarloo, S.R., Siami-Irdemoosa, E., (2015). Maximum surface settlement based classification of shallow 810
tunnels in soft ground. Tunnelling and Underground Space Technology 49, 320–327. 811
https://doi.org/10.1016/j.tust.2015.04.021 812
82. Salimi, A., Rostami, J., Moormann, C., (2017). Evaluating the suitability of existing rock mass classification 813
systems for TBM performance prediction by using a regression tree. Procedia Engineering 191, 299–309. 814
https://doi.org/10.1016/j.proeng.2017.05.185 815
83. Liaw, A., Wiener, M., (2002). Classification and regression by random forest. R News: The Newsletter of 816
the R Project, 2/3, 18-22. 817
84. Kuhn, M., Johnson, K., (2013). Applied Predictive Modeling, Springer, New York. 818
85. Qu, Y. L. (2005). Neural network prediction of ground deformation caused by urban underground 819
engineering. Master’s thesis, Nanjing University of Technology, Nanjing, Jiangsu Province, China (in 820
Chinese). 821
86. Neaupane, K.M., Adhikari, N.R., (2006). Prediction of tunneling induced ground movement with the multi-822
layer perceptron. Tunnelling and Underground Space Technology. 21(2): 151–159. 823
https://doi.org/10.1016/j.tust.2005.07.001 824
87. Taghavifar, H., Mardani, A., Taghavifar, L., (2013). A hybridized artificial neural network and imperialist 825
competitive algorithm optimization approach for prediction of soil compaction in soil bin facility. 826
Measurement. 46 (8), 2288–2299. http://dx.doi.org/10.1016/j.measurement.2013.04.077 827
88. Hajihassani, M., Armaghani, D.J., Marto, A., Mohamad, E.T., (2015). Ground vibration prediction in quarry 828
blasting through an artificial neural network optimized by imperialist competitive algorithm. Bulletin of 829
Engineering Geology and Environment. 74 (3), 873–886. https://doi.org/10.1007/s10064-014-0657-x 830
89. Jaksa, M.B., Maier, H.R., Shahin, M.A., (2008). Future challenges for artificial neural network modelling in 831
geotechnical engineering. In: Proceedings of the 12th International Conference of International Association 832
for Computer Methods and Advances in Geomechanics (IACMAG), India. 1710-1719. 833
90. Shcherbakov, M.V., Brebels, A., (2013). A Survey of Forecast Error Measures. World Applied Sciences 834
Journal. 24, 171–176. https://doi.org/10.5829/idosi.wasj.2013.24.itmies.80032 835
91. Ghaderi, A., Shahri, A. A., Larsson, S., (2018). An artificial neural network based model to predict spatial 836
soil type distribution using piezocone penetration test data (CPTu). Bulleting of Engineering Geology and 837
Environment. 1-10. https://doi.org/10.1007/s10064-018-1400-9 838

33
92. Chai, T., Draxler, R. R., (2014). Root mean square error (RMSE) or mean absolute error (MAE)? – 839
Arguments against avoiding RMSE in the literature. Geoscientific Model Development. 7, 1247–1250. 840
https://doi.org/10.5194/gmd-7-1247-2014 841
93. Shahri, A. A., Asheghi, R., (2018). Optimized developed artificial neural network-based models to predict 842
the blast-induced ground vibration. Innovative Infrastructure Solutions. 3(34), 1-10. 843
https://doi.org/10.1007/s41062-018-0137-4 844
94. Liou, S.W., Wang, C.M., Huang, Y.F., (2009). Integrative discovery of multifaceted sequence patterns by 845
frame-relayed search and hybrid PSO-ANN. Journal of Universal Computer Science. 15 (4), 742–764. 846
95. Ahmadi, M.A., Ebadi, M., Shokrollahi, A., Majidi, S.M.J., (2013). Evolving artificial neural network and 847
imperialist competitive algorithm for prediction oil flow rate of the reservoir. Applied Soft Computing. 13 848
(2), 1085–1098. https://doi.org/10.1016/j.asoc.2012.10.009 849
96. Jiang, A., Wang, S., Tang, S., (2011). Feedback analysis of tunnel construction using a hybrid arithmetic 850
based on Support Vector Machine and Particle Swarm Optimisation. Automation in Construction. 20 (4), 851
482–489. http://dx.doi.org/10.1016/j.autcon.2010.11.016 852
97. Srivastava, N., Hinton, G.E., Krizhevsky, A., Sutskever, I., Salakhutdinov, R., (2014). Dropout: A simple 853
way to prevent neural networks from overfitting. Journal of Machine Learning Research. 15 (1), 1929–1958. 854
98. Mao, R., Zhu, H., Zhang, L., Chen, A., (2006). A new method to assist small data set neural network learning. 855
In: Intelligent Systems Design and Applications, 2006. ISDA'06. Sixth International Conference on. IEEE, 856
pp. 17–22. https://doi.org/10.1109/ISDA.2006.67 857
99. Ahangari, K., Moeinossadat, S. R., Behnia, D., (2015) Estimation of tunnelling-induced settlement by 858
modern intelligent methods. Soils and Foundations. 55(4), 737-748. 859
https://doi.org/10.1016/j.sandf.2015.06.006 860
100. Adoko, A. C., Zuo, Q. J., Wu, L., (2011) A fuzzy model for high-speed railway tunnel convergence 861
prediction in weak rock. Electronic Journal of Geotechnical Engineering. 16(Q), 1275-1295. 862


















