0466014-Ien Instructions for the Arcaii Controller Maintenam
36
INSTRUCTIONS FOR THE ARCAII CONTROLLER MAINTENANCE TERMINAL ¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾ GENERAL INSTRUCTIONS Std. No.: 0466005.doc Revision : 1 Total pages: 36 Date: 06/06/2022 Prepared by: Checked by: J.M. Albístur Project:ARCA II
Transcript of 0466014-Ien Instructions for the Arcaii Controller Maintenam

INSTRUCTIONS FOR THE ARCAII CONTROLLER
MAINTENANCE TERMINAL¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾¾
GENERAL INSTRUCTIONS
Std. No.: 0466014.doc
Revision : 1
Total pages: 29
Date: 07/04/2023
Prepared by:
Checked by: J.M. Albístur
Project:ARCA II

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 2 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
INDEXPage
PAGE 2
1. HANDLING THE TERMINAL 4
1.1. CONNECTING POINTS 5
1.2. CONNECTING THE TERMINAL 6INITIAL STAGE 6
PRESS ANY KEY 6
CONNECTING TO ARCAII CONTROLLERS 7
LOGGING ON THE CONTROLLER (BOTH ARCA AND ARCAII) 8
ACCESS MENU TREE 8
2. OPERATING THE TERMINAL 9
2.1. MOVING THROUGH THE TERMINAL MENUS 9
2.2. MOVEMENT THROUGH A DIALOGUE MENU 9
2.3. EDITING A PARAMETER VALUE 10
2.4. DESCRIPTIVE FORMAT OF MT MENUS IN THIS DOCUMENT 12
3. DEVICE MT 12
3.1. TABLA OF MENUS OF MT 121.- FAULTS 12
4.- FUNCTIONS 13
7.- ASSEMBLY 14
3.2. Description of the faults of the device Control 15

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 3 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
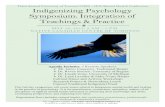
DESCRIPTION OF THE MAINTENANCE TERMINAL
M
Connector
Keyboard
Display screen
Connection cable
Box

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 4 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
1. HANDLING THE TERMINALIn order for the maintenance terminal to operate correctly, it is necessary to take the
following precautions during its operation:
Do not store or use the terminal in extreme temperatures. The recommended operating temperature is between 5ºC and 40ºC.
Avoid splashes or excessively damp atmospheres.
Avoid the condensation produced when going from a very cold to a very hot atmosphere.
Avoid knocks and drops.
Do not press on the display screen.
Press on the keyboard gently (do not exert excessive pressure).
Do not damage the connecting cable with cuts or excessive folding (do not twist the cable).
When connecting or disconnecting do not pull on the cable. Use the body of the connector.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 5 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
1.1. Connecting Points
The new Terminal can be connected to both ARCA and ARCAII controllers.
ITEM ARCA CONTROLLER ARCAII CONTROLLER
Connection type
Connect direct to the controlller
Connect direct to the communications bus.
Normal connecting points
Only connector J9 on the controller’s Master Board (PBCM). Female-Female adapter required.
Connector J27 of the communications bus of the Master Board (PBCM)
Connector J25 on the car roof switchboard (PDCC).
Connector J7 on the connecting strip of the car control station (PCB).
Connecting points requiring an adaptation cable
NoneExtension cable 1 for landing control station.
Monochrome LCD position indicator.
Other connecting points for multiplex lift installations
None
Gateway connector J1 for shared control stations (PGW).
Connector J43 on the controller’s gong and horizontal communications board (PCH/G). External power supply to the terminal required.
The next figure aims to illustrate the differences in the connections of the new terminal to the ARCA and ARCAII controllers.
In an ARCAII system, the Terminal can connect with the following devices:
Controller
Telealarm/Teleservice
Monochrome LCD position indicator.
Extensions 1, 2, 3, 4 & 5.
Orona load weighing switch (in future).
Connection to ARCA controller Connection to ARCAII controller
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 6 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
1.2. Connecting the Terminal
INITIAL STAGE
Before connecting the terminal to the controller a check must be made that:
The controller is on, RED pilot lamp on.
The lift car is at a standstill
Insert the terminal connector in the appropriate connector.
The display screen will show the following message:
Press any key
M
ORONA (C)

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 7 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
The display screen will show this message:
If you wish to connect to an ARCAII device you can push key to bypass the ARCA search phase.
CONNECTING TO ARCAII CONTROLLERS
Shortly after displaying the SEARCHING ARCA message, the screen changes to:
Shortly after displaying the SEARCHING ARCAII message, the screen changes to:
Press after selecting option “1.Presentes” to view the list of devices which the Terminal has found to be connected to the communications bus:
Press after selecting option “1.Control (0)” to view the controller log on menu that is similar to the ARCA controller’s:
From now on, the procedure is similar for ARCA and ARCAII controllers and is described in section .
M
SEARCHING ARCA
SEARCHING ARCAII
* MAIN MENU *
> 1.Present
2.MT Functions
*1. PRESENT *
> 1.Control (0)
2.(R)Extensions
3.Autodialler
Ver UN:1.0 TM:1.00
(12: 4:10)( 3/10/04)
Enter password:
Password [ 0]

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 8 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
LOGGING ON THE CONTROLLER (BOTH ARCA AND ARCAII)
CONTROLLER STEP 1. The display screen will show the input message:
CONTROLLER STEP 2. Introducing the password:
Press (the cursor will be flashing between the Password brackets).
Type the password (maximum 4 digits).
Press again.
If a correct password has been entered, the screen displays the main menu; otherwise, repeat the action, introducing the correct password.
Main Menu:
ACCESS MENU TREE
ARCAII Tree
* MAIN MENU *> 1.Present
2.MT functions*1. PRESENT *> 1.Control (0)
2.(R)Extensions3.Autodialler
* MT MENU *> 1.Calculator
2.MT clock3.Monitor
Ver UN 1.0 TM:0.10(12: 4:10)( 3/10/04)
Clave [ 0]
* ARCA II CONTROL *> 1-faults
2-hystoric3-variables
Ver UN:1.0 TM:1.00(12: 4:10)( 3/10/04)Enter Password:Password [ 0]
2. OPERATING THE TERMINALThe information contained in the maintenance terminal is distributed in a structure of menus and submenus grouped together in accordance with their function and contents at different levels.
M
Ver D:M1.0 TM:1.0
(32: 4:10)( 3/10/96)
Password [ 0]
No. of the version of the controller programme
No. of the version of the terminal programme
Date on the controller clock
Basic access code
* ARCA CONTROL *
»1-faults
2-hystoric 3-variables
Time on the controller clock
Password

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 9 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Normally, the last submenu of a specific branch contains a dialogue menu in which it is possible to display and/or edit variables and parameters of the terminal. Access and movement through the “tree” is detailed below:
2.1. Moving through the terminal menus
A menu display screen may be as follows:
In order to move through the submenus, use the following keys:
: Moves the cursor which points at a submenu one line upwards.
: Moves the cursor which points at a submenu one line downwards.
: Moves the cursor which points to a submenu one page (three lines) upwards.
: Moves the cursor which points to a submenu one page (three lines) downwards.
: Provides access to the menu immediately above (except on the upper level).
: Provides access to the menu pointed to by the cursor “»”.
2.2. Movement through a dialogue menu
A dialogue menu display screen may be as follows:
NOTE: There are two kinds of general data fields:
Variables: Their values are written between brackets (). Their value cannot be edited (read only).
Parameters: Their values are written between square brackets []. Their value can be edited (writing/reading).
In order to move through a dialogue menu, use the following keys:
: Positions the cursor on the first line of the menu (only for menus that do no include submenus).
M
*5.3. VERTICAL MOV *
»1-type acc.
2-speeds
3-times
*3.1. GENERALES *
Mode » NORMAL)
Fault (NO)
Numeration of the menu(each level separated by one point)
Numeration of the menu(each level separated by one point)
Name of the higher submenu
Name of the submenu in which the variables or parameters are located
List of submenus
Values of the variables or parametros
Cursor position:
Pointing to a submenu
Position of the cursor: pointing to the value of a variable or parameter
Identification name of the variable or parameter

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 10 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
: Positions the cursor on the last line of the menu (only for menus that do not include submenus).
: Moves the cursor which points to a variable or parameter one line upwards.
: Moves the cursor which points to a variable or parameter one line downwards.
: Moves the cursor which points to a variable or parameter one position to the left.
: Moves the cursor which points to a variable or parameter one position to the right.
: Removes the label of the submenu on the first line, increasing to 4 the number of lines available for displaying variables and parameters. The label reappears when key is pressed again.
: Moves the cursor which points to a variable or parameter one page (three lines) upwards.
: Moves the cursor which points to a variable or parameter one page (three lines) downwards.
: Provides access to the menu immediately above (leaves dialogue menu).
: Provides access to the edition of the parameter value pointed at by the cursor “»”
2.3. Editing a parameter value
There are three basic types of parameters in the parameter list:
Numerical: allow a decimal number as input
Parameters which represent a time unit as shown with a letter which indicates the time base. Examples:
Delay P36 [ ]C : Time base in hundredths of a second “C”
Car Call [ ]D : Time base in tenths of a second “D”
Max Leveling [ ]S : Time base in seconds “S”
T_car_light [ ]M : Time base in minutes “M”
S. Insp. .[ ]N : Speed in cm/s “N”
In parameters or variables which represent distances, the unit represents millimetres, except for those stated in encoder pulses “p”.
In speed parameters, the unit is in cm/sec “C”.
List: allow a value within a default value list.
Alphanumerical: allow both figures and letters.
Once the cursor (flashing) is placed within the editing field of a parameter, the process for editing parameters with the keyboard is as follows:
and : In the case of a list type parameter, change the values between the possible default parameters.
to : In the case of a numerical parameter, enter the digits with the required value.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 11 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
al : In the case of an alphanumerical parameter, enter the digits with the required
value. Staying with the selected key pressed the AV_PAG and RE_PAG allow to change
between the different characters associated to that key. Le '-' (minus) sign is on the '1' key.
: In the case of a numerical parameter, deletes the last digit entered.
: Leaves the editing field without modifying the value of the parameter.
: Sends the value entered in the controller. If the piece of data entered is correct, this is displayed in the editing field, otherwise the initial value is displayed (a new valid value must be entered).
Modification of a parameter is only possible if the car is at rest. In order for the modified parameter(s) to remain after a power cut, the function [Store Param.] in menu “ 4.2.1 Store parameters” must be activated.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 12 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
2.4. Descriptive format of MT menus in this document
All the menus displayed on the MT screen consist of several read or write fields surrounded by
text. By pressing the keys , the user can move the cursor from one field to another. The next section ‘Examples’ shows a typical description of the so-called ‘Speed’ menu. This is a real menu of the MT. Various fields will be found.
A description of the different parts of a menu is given in the table below:
Fields on the screen
Screen No. Marks Possible values DescriptionThis field reproduces the content of the MT menu as it would appear on the display if there were enough lines to view it completely. The fields in blue and with square brackets are writable whereas the fields in orange and with brackets are read only fields. At times, due to space limits, symbols “:” and “=” are used instead of [] () but they have the same meaning.
Number of the field being described.
Icons indicating some of the characteristics of the field. These are examples of such icons:
denotes a field continually uptaded every half a second.
denotes a read only field.
denotes a field in binary format.
denotes a field in hexadecimal format.
denotes that it is necessary to push the VALIDAR key to start the function execution. Once the function has finished the result is shown at the screen.
This field identifies the unit used for the parameter/variable and its possible values. It sometimes contains information on each value.
This field describes the associated variable in detail.
The following section shows an example of how one of the menus would look like.
3. Device MTMT node
3.1. Tabla of menus of MT
Main Controller
1.- FAULTS
Shows all the faults
1.1.- LAST FAULT
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 13 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*1.1. LAST FAULT *Fault.Nr ( 1)Anom.Nr ( 2)
1 Latest failure
2 Latest anomaly
1.2.- FAULTS LISTFaults list
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*1.2. FAULTS LIST *0) ( 1)... ( 2)1) ( )... ( )2) ( )... ( )
1 Número de identificación de la averia
2 ON
OFF
Estado en que se encuentra la averia (Activa:1 o Desactivada:0)
1.5.- FAULT RECOV.
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*1.5. FAULT RECOV. *Select Yes and press Confir[ 1]
1 NO
YES
This command activates the recovery of stored type faults
4.- FUNCTIONS
4.1.- ENABLE CALLS
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*4.1. ENABLE CALLS *Landing[ 1] Act[ 2]Type [ 3]Entr [ 4] Pos [ 5]
1
2 NO
YES
Activates the PIC speed test function.
3 CAR
LANDING_UP
LANDING_DN
VIP
4 ENTR1
ENTR2
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 14 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Screen Fields of the screen
No.
Mark Possible Values
Description
5 With the car at rest:
In the door zone: this is the floor the car is parked at.
Outside the door zone: In position system 1, this is the lower floor and in position system 2, the nearest floor.
With the car in motion: the nearest floor where levelling is possible.
The logic position of the lower terminal floor is 0, except for asymmetric multiplex lifts where said position coincides with the value of parameter PLANTA INF 5.1.1
4.2.- PARAMETERS
4.2.1.- STORE PARAMETERS
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*4.2.1. STORE PARAM*Store Param. [ 1]Pend. storing ( 2)
1 NO
YES
Store Parameters command
2 NO
YES
[YES]: Indicates that a parameter has changed, but the GRABAR PARAM (Store Parameters) function 4.2.1 has not been activated yet
4.2.2.- ASSOCIATED PARAM.
4.2.2.1.- INI CONFG CALLS
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*4.2.2.1. INI CONFG*Inic. Confg. Cal[ 1]
1 NO
YES
Gets the calls default configuration.
7.- ASSEMBLY
Parameters for starting the control during erection.
Description of the screen
Screen Fields of the screen
No.
Mark Possible Values
Description
*7. ASSEMBLY *Assembly mode [ 1]Limits Vmax [ 2]Vmax_insp [ 3]0ing_Sp [ 4]W.Expl_Sp [ 5]Ena.Ir.Insp/Emer[ 6]Magnets CB in CO[ 7]Magnets CS in CU[ 8]
1 NO
YES
[YES]: Activates a special emergency mode that is used during the initial assembly. Its value must be set to [NO] upon completion of the lift assembly.
2 Vinsp
V_GV1
V_GV2
V_GV3
V_GMAX
[VMAX]: Limits the maximum speed level in the following journeys: floor-to-floor, recovery, zeroing, and lift well exploration
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 15 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Screen Fields of the screen
No.
Mark Possible Values
Description
Enable Ent Ext5 [ 9]Encoder Rot. [ 10]
3 Vinsp
V0
VMAX
Maximum inspection speed level.
Default value: [VINSP]
4 Vinsp
V1
V2
V3
VMAX
Permits selecting Vinsp, V1, V2, V3 or VMAX as the speed for the zeroing process.Only for variable drives with position system type 2. Make sure the selectedspeed is activated (see 5.3.2).
5 Vinsp
V1
V2
V3
VMAX
Permits selecting Vinsp, V1, V2, V3 or VMAX as the speed for lift wellexploration. Only for variable drives with position system type 2. Make sure the selectedspeed is activated (see 5.3.2).
6 NO
YES
Setting [NO] cancels the detection of the door reopening signals.(IR: photocell and IRM: mechanical reopening, during the inspection or Emergency services. Permits car travels with no dooroperator installed.
7 Range :1..10 This must state the number of skates CB there are below the lower magnet (zone CO). This number must coincide with the value detected by the switches at 3.2.5 of MT.
8 Range :1..10 This must state the number of skates CS there are above the upper magnet (zone CU). This number must coincide with the value detected by the switches at 3.2.5 of MT.
9 NO
YES
VEnables all the 'Enable' correspondant to the following modes/functions/controls:
Enable firemen's (5.9.2)
Enable evacuation (5.9.3)
Enable water in pit (5.9.8)
Enable urgent cancel (5.9.9)
Enable no urgent cancel (5.9.A)
Enable hume control (5.3.4.C)
Enable rescue (5.3.4.4)
Enable cancel if fire (5.A.1)
If 'Valida Ent Ext5' parameter is FALSE, all those 'Enable' are desactivated.
If TRUE, all 'Enable' TRUE are activated.
Default value: [NO]. Debe ponerse a [SI] tras finalizar la fase de montaje y puesta a punto.
10 Dir0
Dir1
With this parameter, the control can be adapted to the two types of pulse phase shifts of the overspeed governor encoder (A,B).
3.2. Description of the faults of the device Control
Description of the faults of the device Control
No. Name Description Reason1 FA_NO_P32_RUNNING With the car running, the security chain
was interrupted before point 32.
In the inspection and emergency modes, this fault is not detected.
As for electric drives, if parameter 'Mem.P32 marcha' (5.3.4) is enabled, the Fault is of the stored type.
Check the safety contacts upstream of point 32 (safety travel LS, overspeed governorsafety gear, tension pulley, contacts, buffers, etc). The overspeed governor pulleycan cause intermittent faults.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 16 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason2 FA_NO_P32_REST With the car at rest, the security chain
remained interrupted for time (see MT. 5.3.3 Delay P32). In the inspection mode, this fault is detected only when pressing the start pushbuttons BSM/BDM.
In the emergency mode, this fault is detected only when pressing the start pushbuttons BSCM/BDCM.
Check the safety contacts upstream of point 32 (safety travel LS, overspeed governorsafety gear, tension pulley, contacts, buffers, etc). The overspeed governor pulleycan cause intermittent faults.
3 FA_NO_P35_RUNNING With the car runing, the security chain was interrupted between points 32 and 35.
Check the door detection contacts 'CP' (case of manual landing doors).
4 FA_NO_P35_REST With the car at rest, the security chain remained interrupted for time (see MT.5.3.3 Delay P35) between points 32 and 35.
Check the door detection contacts 'CP' (case of manual landing doors).
The information of the position that provides the fault details helps to identify the problematic door.
Normally, this fault occurs when the user keeps the landing door open too long.
5 FA_DOOR_LOCK Point 36 of the security chain is not activated after a delay from the beginning of the closing of the doors.
Check the landing doors and the lock contacts, especially on the floors where the fault is registered
Check the car door and its door closing contact.
Check the door operator. The information of the position that provides the fault details helps to identify the problematic door
6 FA_UPPER_LIMIT_SW_HYDRAULIC
In a hydraulically driven lift, the upper terminal floor limit switch actuated(input E9).
When the safety chain closes, the car is redirected to the lower terminal floor. All types of calls for this lift are cancelled.
This fault is locked (to restore it, enable the MT's function 1.5 REC:AVE)
Analyse why the lift overran the upper travel limit switch(excessive deceleration distance,cold oil...). If nothing wrong is found, increase the speed change distance for the last floor
7 FA_NO_TEL_LINE The alarm dialler (Autodialler2005) has comunicate that the telephone line is not available.
8 FA_WATCHDOG System fault.
This occurs when a software task is not refreshed.
It results in a reset of the CPU.
100 FA_NO_P36_RUNNING With the car running, the security chain was interrupted between points 35 and 36.
During a journey, check the space between the landing door driving device and the locks (CT)
especially at the floor where the fault was registered (fault data MT.
This fault can also be due to the breaking of the closed car door contacts CC1, CC2.
200 FA_IR1/IRM1_CLOSING The maximum number of consecutive door reopenings at entrance nr.1 under the action of IR1 or IRM1 has been exceeded(see MT 5.5.3 No_MAX_RETROC).
The car calls are suppressed, the car is parked with door open and out of service for landing calls .
Car calls can still be registered.
The fault is restored when the door finishes closing.
Out of service status also reverses at the end of time Recup_IR_Cerr (5.5.4)
Check for correct functioning of door reopening at entrance nr.1 (obstruction, door condition, alignment of photocell, barrier, etc.)
Fault caused by the user.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 17 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason201 FA_IR2/IRM2_CLOSING tThe maximum number of consecutive
door reopenings at entrance nr.2 under the action of IR2 oR IRM2 (see MT 5.5.3 No_MAX_RETROC). Performance similar to fault 200.
Check for correct functioning of door reopening at entrance nr.2 (obstruction, door condition,alignment of photocell, barrier, etc.)
Fault caused by the user.
202 FA_IR1_PERMANENT Photocell or barrier-induced door reopening at entrance nr.1 (IR1) remained interruptedfor time (see MT 5.5.2 Detect_IR_PER)
Check for correct functioning of photoelectric door reopening at entrance nr1 (alignment of photocell, barrier, etc.)
Fault caused by the user
203 FA_IR2_PERMANENT Photocell or barrier-induced door reopening at entrance nr.2 (IR2) remained interruptedfor time (see TM 5.5.2 Detect_IR_PER)
Check for correct functioning of photoelectric door reopening at entrance nr2 (alignment of photocell, barrier, etc.)
Fault caused by the user
204 FA_LCP1_ON System detected that the door closing limit switch at entrance nr.1, is permanently on.
This fault can be detected only if parameter 5.5.7 LCP Entr1 is enabled.
Check the door automatism and the door closed contacts LCP
205 FA_LCP2_ON System detected that the door closing limit switch at entrance nr.2, is permanently on.
This fault can be detected only if parameter 5.5.7 LCP Entr2 is enabled.
Check the door automatism and the door closed contacts LCP
208 FA_IRM1_PERMANENT The mechanical door reopening at entrance nr.1 (IRM1) remained interruptedfor time (see MT 5.5.2 Detect_IR_PER).
Check for correct functioning of the mechanical reopening of the door.
Fault caused by the user.
209 FA_IRM2_PERMANENTE The mechanical door reopening at entrance nr.2 (IRM2) remained interruptedfor time (see MT 5.5.2 Detect_IR_PER).
Check for correct functioning of the mechanical reopening of the door.
Fault caused by the user.
210 FA_AP1_PERMANENT The door open pushbutton AP1 remained on for more than 30 sec.
Check the pushbutton.
Fault caused by the user.
211 FA_AP2_PERMANENT The door open pushbutton AP2 remained on for more than 30 sec.
Check the pushbutton.
Fault caused by the user.
290 FA_OUT_DZ The car stays outside the door zone for a certain time (see MT 5.3.3 Outside DZ).
Fault not detected in the inspection and emergency modes.
Check for associated faults which have led to this situation.
291 FA_OUT_DZ_RESCUE During redirectioning to floor with the rescue system in an electric installation, the car stopsoutside the door zone. Prevents consecutive rescues.
To be able to carry out a new rescue operation, enable MT's function 1.5 REC. AVE. MEM
Movement performed at excessive speed.
MT's parameter Ret:punto Par of 5.3.3 is set too high.
307 FA_M/C_ROOM_LOW_TEMP
The machine-room temperature is below the minimum temperature value programmed as a parameter. This prevents only floor-to-floor journeys to start.
This fault is detected only if the control has the option (see MT 5.3.4.5).
Careful with extreme ambient conditions.
308 FA_PRESSSURE_SW_HYDR
Not implemented.
309 FA_ALARM_INVERTER A fault of the speed regulator has been detected (input E5 on).
This fault is detected only if the drive is the variable type.
Analyse the causes which produced this fault, by retrieving information of the speed regulator.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 18 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason310 FA_UP_ROLLBACK System detected a reverse motion during
the start cycle in the up direction. To restore the fault, enable the MT's function 1.5 REC. AVE. MEM or press the inspection switch.
Check connections of overspeed governor encoder. (Cable A or cable /A can be interchangedwith cable B or cable /IB respectively.)
Problems with the vertical drive, power supply to motor, etc.
Problems on extension board A/B
311 FA_DOWN_ROLLBACK System detected a reverse motion during the start cycle in the down direction. To restore the fault, enable the MT's function 1.5 REC. AVE. MEM or press the inspection switch.
Check connections of overspeed governor encoder. (Cable A or cable /A can be interchangedwith cable B or cable /IB respectively.)
Problems with the vertical drive, power supply to motor, etc.
Problems on extension board A/B
312 FA_RELAY_RPS_STUCK Relay RPS of auxiliary circuit for open door movements is on permanently (input PS on).This fault is detected only if the control includes the 'relevelling w/ open door' option (see MT 5.5.3.1 Ison.Pu.Abi.) or the 'levelling w/ open door' option (see MT 5.5.3.1 Nivel.Pu.Abi.).
To restore the fault, enable the MT's function 1.5 REC. AVE. MEM or or press the inspection switch.
Check relay RPS (board PPS) and input PS (Master Board).
313 FA_IR1_RUNNING It occurs when the photocell at entrance nr.1 (IR1) has been operated during a journey of the car.
It is detected only if parameter 5.5.3.1 IR1_Journey is enabled. It is used only in doorless car installations.This is a stored type fault. It can also be restored by making a car call
Analyse the causes of its activation, user's action
314 FA_IR2_RUNNING It occurs when the photocell at entrance nr.2 (IR2) has been operated during a journey of the car.It is detected only if parameter 5.5.3.1 IR2_Journey is enabled. It is used only in doorless car installations.This is a stored type fault. It can also be restored by making a car call
Analyse the causes of its activation, user's action
315 FA_RESCUE_DOES_NOT_REACT
This faillure occurs when the control of an electric lift orders redirectioning to nearest floor in rescue mode (output ActRe on) and fails to get confirmation of the activation of input ConRe within 30 sec.To be able to carry out a new rescue operation, enable MT's function 1.5 REC. AVE. MEM
Check connection to the auxiliary rescue system. Check that relay R1 in rescue switchboard turns on.
319 FA_RPS_OFF This fault occurs when relay RPS does not turn on when activated (input PS remains off).
This fault is detected only if the control includes the 'relevelling w/ open door' option (see MT 5.5.3.1 Ison.Pu.Abi.).
To restore the fault, enable the MT's function 1.5 REC. AVE. MEM or or press the inspection switch.
Auxiliary circuit of the open door movements PPS.
Wrong parameters.
Faulty connections.
326 FA_CHANGE_ROPE On M33 lifts, the number of journeys exceeds the sum of values LIM_AN_CABLE + INC_FA_CABLE (see 5.3.4.8)
327 FA_ODD_PARITY_AON_BOFF
This fault occurs when the status of inputs EA, EB on the master board (PBCM) is EA ON, EB OFF.
These inputs refer to the condition of the relays A and B on board PPS (open door movements).
An odd parity occurred.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 19 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason328 FA_ODD_PARITY_AOF_BO
NThis fault occurs when the status of inputs EA, EB on the master board (PBCM) is EA OFF, EB ON.
These inputs refer to the condition of the relays A and B on board PPS (open door movements).
An odd parity occurred.
329 FA_M/C_ROOM_OVERTEMP
The machine room temperature exceeded the maximum temperature value programmed as a parameter. This prevents only floor-to-floor journeys to start.
This fault is detected only if the control has the option (see MT 5.3.4.5).
Careful with extreme ambient conditions.
330 FA_CONTAC_STUCK This alarm occurs when the contactor input is on while the associated contactor coil is off.
The field "Xtra Info" of the fault shows the contactor input concerned. See electromechanical drawing.
Stuck contactor or bad connection.
340 FA_NO_CONTACTOR This alarm occurs when the contactor input is off while the associated contactor coil is on.
The field "Xtra Info" of the fault shows the contactor input concerned. See electromechanical drawing.
A contactor remains off.
348 FA_CEM1_STUCK This alarm occurs when the input of contactor CEM1 is on while the contactor coil is off.
Stuck contactor or bad connection.
349 FA_HUMO_HUECO Annexe for Belgium. (5.3.4.B Smoke control [YES])
The smoke detector has been activated.
To reset the fault the detector must be OFF and to activate the RESET input.
500 FA_24VDC_SUPPLY Fault of the 24VDC power supply circuit. Voltage drop or circuit fault.
502 FA_PHASE_FAULT It occurs when the phase fault and inversion circuit (board PBCM) is activated.
Check supply voltage of three-phase system and/or change the connection of two ofthe phases.
Review PIC parameterization (MT. 5.C.1)
505 FA_POWER_SHUTDOWN Supply voltage to the master board PBCM has been cut off.
The fault may also occur in case of malfunction of the CPU, e.g. watchdog fault.
600 FA_NUM_STOPS_WELL_EXPL
The number of floors detected during the lift well exploration does not coincide with the real value (see MT.5.1 Nr. of floors, ground floor).
This is a positioning type fault.
Check correct fitting of skates in the enclosure according to the lift installation specifications.
Verify if the intermediate skate fixing brackets have been mounted in an area in which there are CS and CB skates.
In software versions older than 1.48, the fault can originate in a problem of parameters erasure.
602 FA_V>03_OPEN_DOOR_MOV
During a movement with the doors open, the speed exceeded 0.3m/s (input V03 turned on).This fault is detected only if parameter 5.3.4.1.1 Control V less than 03 is enabled.It is a stored type fault.
Drive fault, fault of the speed level detection device PCV or of the control.
Wrong parameterization of PIC (MT 5.C.5)
603 FA_V>03_LEVELLING_MOV
During a movement that started at levelling speed (V0), the actual speed exceeded 0.3m/s (input V03 turns on).This fault is detected only if parameter 5.3.4.1.1 Control V less than 03 is enabled.It is a stored type fault.
Drive fault, fault of the speed level detection device PCV or of the control
Wrong parameterization of PIC (MT 5.C.5)
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 20 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason604 FA_PERMANENT_OVERLO
ADSystem detected that the car overload input SC (EXT. 4.0 or PBCM) remained on during a preset time (30 sec.).Check input status with the MT.
Check:
The load of the car
The setting of the overload contact SC, etc.
605 FA_VERTICAL_COMMUNICATIONS
There is no connection with the nodes of the Vertical Bus.
The nodes do not answer
607 FA_NO_CO_ZEROING This fault is detected when point 32 has been cut during the zeroing process, although the switch CO was not on.
If the lower travel limit switch operated, this could mean that the switch CO wasnot activated correctly.
608 FA_LOWER_NUM_CB_CO_ZEROING
The fault is detected when point 32 has been cut during the levelling in the zeroing process
If the lower travel limit switch operated, this could mean that the number of skates detected in the area where CO is on is less than as set in parameter N.Skates CB in CO.(see MT's menu 7.).
609 FA_SMALL_DISTANCE_CO_ZEROING
This fault is detected when point 32 is cut during the car stopping in the zeroing process.This is a positioning type fault.
If the lower travel limit switch operated, this could mean that the distance at which switch COmakes is small in relation to the drive's deceleration distance.
In the event of variable drives of positioning type II, it may happen:
That parameter 5.4.3.1 Distance CO is too great compared to the actual distance of CO.
That parameter 5.4.3.1 Dist_B_Vinsp is small in relation to the drive's deceleration distance.
610 FA_NO_CU_WELL_EXPL This fault is detected when point 32 has been cut during movements of lift well exploration, although the switch CU was not on.
If the upper travel limit switch operated, this could mean that the switch CU wasnot activated correctly.
611 FA_LOWER_NUM_CS_CU_WELL_EXPL
It is detected when point 32 has been cut during the lift well exploration with CU on.
If the upper travel limit switch operated, this could mean that the number of skates CS detected in the area where CU is on is less than as set in parameter N.Skates CS in CU(see MT's menu 7.)
612 FA_SMALL_DISTANCE_CU_WELL_EXPL
This fault is detected when point 32 is cut during the car stopping in a lift well exploration.This is a positioning type fault.
If the upper travel limit switch operated, this could mean that the distance at which switch CUmakes is too big in relation to the drive's deceleration distance.
In the event of variable drives of positioning type II, it may happen:
That parameter 5.4.3.1 Distance CU is too great compared to the actual distance of CU.
That parameter 5.4.3.1 Dist_S_Vxx of the speed at which the movement takes place is small in relation to the drive's deceleration distance.
613 FA_CO_PERMANENT_ZEROING
This fault is detected when point 32 is cut and CO remains on, during a zeroing movement that started with CO on.
If the upper travel limit switch operated, this could mean that the switch CO wasnot disconnected correctly.
617 FA_CO_PERMANENT_IN_WELL_EXPL_ZEROING
This fault is detected when switch CU makes and CO remains on during a lift well exploration or zeroing movement that starts with CO on.
This is a positioning type fault.
The position switch is damaged. The CO position signal does not turn off. This may be due to a wrong fitting of the magnets.
618 FA_CU_PERMANENT_IN_ZEROING
This fault is detected when switch CO makes and CU remains on during a zeroing movement.
This is a positioning type fault.
The position switch is damaged. The CU position signal does not turn off.
This may be due to a wrong fitting of the magnets.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 21 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason619 AV_ENRASE_PLANTA_INF It is detected when the lowest floor is
reached in a reference searching movement. For positioning type II, it indicates that no pulse is received at the encoder.
This fault is positioning type.
Problems with the encoder.
630 FA_EXT_3.0 Disconnected or defective node. Problems with the bus
631 FA_EXT_3.1 Disconnected or defective node. Problems with the bus
632 FA_EXT_4.0 Disconnected or defective node. Problems with the bus
633 FA_NO_COM_VERTICAL There is no communication with any node of the vertical bus.
Vertical bus is desconnected or fault of the control
634 FA_COM_PIC Communication fault of device PIC on board PBCM
Device PIC deprogrammed
Change PBCM
658 FA_MYASSERT There is no cause.
800 FA_TMAX_JOURNEY The time of one journey exceeded the setting of parameter Max Journey (see MT.5.3.3).
For zeroing and lift well exploration journeys, this time is increased by 15 seconds and moreover this fault is not checked if the travelling speed is less than the rated speed.
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, brake will not open, etc.)
The parameter value is inadequate, etc.
Problems with the vertical drive (inadequate speed).
801 FA_TMAX_LEVELLING The levelling time (Speed change on stopping) exceeded the value set in parameter Max Levelling (see 5.3.3)
This fault is also detected when the a.m. time is exceeded during the floor-to-floor and recovery journeys that start at levelling speed (V0). As for hydraulic drives, the a.m. time is increased by parameter T.Desplaza (see MT 5.3.3.) when starting is in the up direction.
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.).
Wrong location of skates.
Inadequate parameter value, etc.
Problems with the vertical drive (inadequate speed).
802 FA_TMAX_LEVELLING_ZEROING
During a zeroing journey, the levelling time (speed change on stopping) exceeded the value set in parameter Max Lev.Zeroing/W.EXPL (see MT 5.3.3).
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.)
The parameter value is inadequate, etc. Problems with the vertical drive (inadequate speed).
803 FA_TMAX_JOURNEY_LOW_EXTR_HYDRAULIC
In a hydraulic lift, the time of a journey to the lower extreme point exceeded the value set in parameter Tmax EIH (see MT. 5.3.5)
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.)
The parameter value is inadequate
Wrong location of skates. etc.
Problems with the vertical drive (inadequate speed).
804 FA_SLIPPING Only if positioning type is II.
System detected that the car moved more slowly than planned. The distance the car must run is calculated from the speed and acceleration data (see MT. 5.3.2).
Monitoring starts a certain time after the lift starts, parameter T.Desplaza (see MT. 5.3.3).
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.)
Problems with the encoder of the overspeed governor.
Problems on board PBCM.
Parameter Centi.mm/pulse Menu 5.4.3.4. is inadequate.
Problems with the vertical drive (inadequate speed).
Incorrect speed parameters (Value_Vxx Menu 5.3.2).
805 FA_TMAX_LEVELLING_WELL_EXPL
During the lift well exploration, the levelling time (speed change on stopping) exceeded the value set in parameter Max Lev.Zeroing/W.EXPL (see MT. 5.3.3).
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.)
Inadequate parameter setting, etc.
Problems with the vertical drive (inadequate speed)
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 22 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason806 FA_TMAX_EXITING_CO_Z
EROINGDuring a zeroing movement, the time for exiting CO exceeded the value set in parameter Max Lev.Zeroing/W.EXPL (see MT. 5.3.3). As for hydraulic drives, the a.m. time is increased by parameter T.Desplaza (see MT 5.3.3.) when starting is in the up direction.
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.).\tInadequate parameter setting.
Switch CO does not turn off, etc.
Problems with the vertical drive (inadequate speed).
850 FA_TMAX_IN_CS Only if positioning type is I:
The time passed by the car in a skate CS, during a run command, exceeded the value set in parameter T. in CSCB (see 5.4.2).
As for hydraulic drives, monitoring starts after a delay when starting is in the up direction (see MT. 5.3.3. T.Desplaza).
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, , etc.).
Wrong location of skates.
Incorrect setting of parameter T.in CSCB.
Pick-up CS permanently on.
Etc.
Problems with the vertical drive (inadequate speed).
In hydraulic drives, the value of parameter T.Desplaza 5.3.3 is too small. Recommended value: 100
851 FA_TMAX_IN_CB Only if positioning type is I.
The time passed by the car in a skate CB, during a run command, exceeded the value set in parameter T. in CSCB (see 5.4.2).
As for hydraulic drives, monitoring starts after a delay when starting is in the up direction (see MT. 5.3.3. T.Desplaza).
Problems with the car movement (slipping, obstacle, lack of oil in \thydraulic lifts, etc.).
Wrong location of skates.
Incorrect setting of parameter T.in CSCB.
Pick-up CB permanently on, etc.
Problems with the vertical drive (inadequate speed)
852 FA_TMAX_NO_CS Only if positioning type is I.
The time passed without any skate CS being detected, during a run command, exceeded the value set in parameter T. no CSCB (see 5.4.2).
As for hydraulic drives, monitoring starts after a delay (parameter MT 5.3.3. T.Desplaza when starting is in the up direction.
Problems with the car movement (slipping, obstacle, lack of oil in hydraulic lifts, etc.).
Wrong location of skates.
Incorrect setting of parameter T.no CSCB.
Pick-up CS permanently off, etc.
Problems with the vertical drive (inadequate speed)
853 FA_TMAX_NO_CB Only if positioning type is I.
The time passed without any skate CB being detected, during a run command, exceeded the value set in parameter T. no CSCB (see5.4.2).
As for hydraulic drives, monitoring starts after a delay when starting is in the up direction (see MT. 5.3.3. T.Desplaza).
Problems with the car movement (slipping, obstacle, lack of oil in hydraulic lifts, etc.).
Wrong location of skates.
Incorrect setting of parameter T. no CSCB.
Pick-up CB permanently off. etc.
Problems with the vertical drive (inadequate speed)
900 FA_NO_CU System did not detect the making of switch CU in upper extreme points zone. Impedes inspection movement in the up direction. This is a positioning type fault.
Switch CU (magnet or switch) does not turn on.\tIn positioning system type I:
o Wrong counting or location of skates CS, CB.
o Inadequate parameters MT. 5.1 Num of floors, lower floor.
o In software versions older than 1.63, the fault can originate in a problem of parameters erasure.
In positioning system type II:
o Error of encoder count.
o Parameter MT. 5.4.3.4 Error CO CU reduced.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 23 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason901 FA_NO_CO System did not detect the making of switch
CO in the lower extreme points zone.
Impedes inspection movement .
This is a positioning type fault.
Switch CO (magnet or switch) does not turn on)
In positioning system type I:
o Wrong counting or location of skates CS,CB.
In positioning system type II:\t\tError of encoder count.
o Parameter MT. 5.4.3.4 Error CO CU reduced.
902 FA_COCU_ON_SIMULTANEOUSLY
System detected that pick-ups CO and CU turned on simultaneously.
It may also occur if switches COCU are connected to Ext4.0 (parameter 'Reading COCU' in MT. 5.4.1)and communication with said extension is interrupted. In this event, fault FA_NO_EXT4_0 632 will occur simultaneously.
While CO and CU remain on simultaneously, no movement whatsoever is permitted except for the emergency service.
This is a positioning type fault.
Position switch is missing or damaged.
One of the position signals CO, CU is not deactivated. Maybe due to a wrong location of the magnets.
903 FA_CU_NOT_IN_ZONE System detected that switch CU turns on outside its assigned zone for turning on (upper extreme point).
This is a positioning type fault.
Position switch is missing or does not turn off
Wrong location of the magnets.
In positioning system type I:
o Wrong counting or location of skates CS,CB.
o Inadequate parameters MT. 5.1.1 Num of floors, lower floor.
In positioning system type II:
o Encoder error.
o Parameter MT. 5.4.3.4 Error CO CU reduced
904 FA_CO_NOT_IN_ZONE System detected that switch CO turns on outside its assigned zone for turning on (lower extreme point).
This is a positioning type fault.
Position switch is missing or does not turn off
Wrong location of the magnets.
In positioning system type I:
o Wrong counting or location of skates CS,CB.
In positioning system type II:
o Encoder error.
o Parameter MT. 5.4.3.4 Error CO CU reduced
905 FA_NO_CS System detected that a skate CS is missing.
This is a positioning type fault.
Wrong location or detection of skates CS.
In positioning system type II:
o Parameter MT. 5.4.3.4 ERROR CS/CB reduced.
o Problems with the encoder
906 FA_NO_CB System detected that a skate CB is missing
This is a positioning type fault.
Wrong location or detection of skates CB.
In positioning system type II:
o Parameter MT. 5.4.3.4 ERROR CS/CB reduced.
o Problems with the encoder
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 24 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason907 FA_DISTANCE_BTWN_ST
OP_POINTSOnly if positioning type is II.
During a lift well exploration, system detected that the distance between the stop pointsat a landing, in the up and down directions (entry flank for CS and exit flank for CB) is greater than the setting of parameter ERROR P_S/P_B (see 5.4.3.4).
This is a positioning type fault.
Wrong fitting or detection of skates and magnets or error in the positioning system set-up parameters.
908 FA_DISTANCE_CO_WELL_EXPL
Only if positioning type is II.
System detected that, after a lift well exploration, the distance from the switch CO toggling point to the levelling point of the lower terminal floor is less than parameter dist_B_Vmax(see 5.4.3.1)
This is a positioning type fault.
Wrong location of magnet CO or error in the positioning system set-up parameters.
909 FA_DISTANCE_CU_WELL_EXPL
Only if positioning type is II.
System detected that, after a lift well exploration, the distance from the switch CU toggling point to the levelling point of the upper terminal floor is less than parameter dist_S_Vmax(see 5.4.3.1).
This is a positioning type fault.
Wrong location of magnet CU or error in the positioning system set-up parameters.
910 FA_PO_FS_CB_DEC Only if positioning type is I
Systems detects, when entering the upper part of a skate CB at a landing, thatskates counting was incorrect.
This is a positioning type fault.
Check location of the skates and switch.
911 FA_PO_FS_CS_DEC Only if positioning type is I
Systems detects, when entering the upper part of a skate CS at a landing, thatskates counting was incorrect.
This is a positioning type fault.
Check location of the skates and switch
912 FA_PO_FS_CB_INC Only if positioning type is I
Systems detects, when entering the lower part of a skate CB at a landing, thatskates counting was incorrect.
This is a positioning type fault.
Check location of the skates and switch.
913 FA_PO_FS_CS_INC Only if positioning type is I
Systems detects, when entering the lower part of a skate CS at a landing, thatskates counting was incorrect.
This is a positioning type fault.
Check location of the skates and switch.
914 FA_PO_FB_CB_DEC Only if positioning type is I
Systems detects, when exiting the lower part of a skate CB at a landing, thatskates counting was incorrect.This is a positioning type fault.
Check location of the skates and switch.
915 FA_PO_FB_CS_DEC Only if positioning type is I
Systems detects, when exiting the lower part of a skate CS at a landing, thatskates counting was incorrect.
This is a positioning type fault
Check location of the skates and switch.
916 FA_PO_FB_CB_INC Only if positioning type is I
Systems detects, when exiting the upper part of a skate CB at a landing, thatskates counting was incorrect.
This is a positioning type fault.
Check location of the skates and switch.
917 FA_PO_FB_CS_INC Only if positioning type is I
Systems detects, when exiting the upper part of a skate CS at a landing, thatskates counting was incorrect.
This is a positioning type fault.
Position switch is damaged.
Position signal CO remains on. This can be due to wrong magnet location
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 25 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason918 FA_PO_CSMCB Only if positioning type is I
System detects if there is too many activations of flank counter CS with respect to flank counter CB (greater than two).
This is a positioning type fault.
Check location of the skates and switch.
919 FA_PO_CBMCS Only if positioning type is I
System detects if there is too many activations of flank counter CB with respect to flank counter CS (greater than two).
This is a positioning type fault.
Check location of the skates and switch.
1000 FA_THERMAL_PROBE_MOTOR
This fault occurs when the transducer of maximum motor temperature and of oil temperature(hydraulic lifts) J35 on PBCM turns on.
If parameter MT. 5.3.4.2 is STH Imnmediate [NO], the car stops at next floor in floor-to-floor and recovery journeys.
If parameter MT. 5.3.4.2 is STH Imnmediate [SI], in floor-to-floor and recovery journeys,the car stops at the end of time set in parameter MT. 5.3.4.2 Delay STH [XX]s.
In other types of journeys, the car stops immediately.
Motor overload.
Extreme ambient conditions (cooling).
1300 FA_LAP1_NOT_ON_OPENING
This fault occurs if the opening of the door at entrance 1, when there is no position reference, exceeds the time set in parameter Tmax. Doors (see MT.5.5.4) before the open door limit switch LAP1 has been detected.(inputs LAP of extension 3.0) ).
Fault of door automatism at entrance 1 (obstruction, faulty contact LAP, problems with operator, etc.).
Fault of extension\t3.0
1301 FA_LAP1_PERMANENTLY_ON
This fault occurs when, the door being closed, it starts to open and the open door limit switch LAP1 is on
Fault of door automatism at entrance 1.
Fault of contact LAP1 or its connection.
1302 FA_LAP2_NOT_ON_OPENING
This fault occurs if the opening of the door at entrance 2, when there is no position reference, exceeds the time set in parameter Tmax. Doors (see MT.5.5.4) before the open door limit switch LAP2 has been detected.(inputs LAP of extension 3.1).
Fault of door automatism at entrance 2 (obstruction, faulty contact LAP, problems with operator, etc, etc.)
Fault of extension 3.1
1303 FA_LAP2_PERMANENTLY_ON
This fault occurs when, the door being closed, it starts to open and the open door limit switch LAP2 is on.
Fault of door automatism at entrance 2.
Fault of contact LAP2 or its connection.
Fault of extension\t3.1.
1400 FA_LAP1_NOT_ON_AT_LANDING
This fault occurs if the opening of the door at entrance 1, when there is a position reference, exceeds the time set in parameter Tmax. Doors (see MT. 5.5.4) before the open door limit switch LAP1 has been detected. (inputs LAP of extension (3:0)).
The field 'Xtra Info' shows the logic position of the landing concerned
Fault of door automatism at entrance 1.
Obstruction, faulty contact LAP, problems with operator, etc...
Check the landing door that caused the fault.
Fault of extension 3.0.4
1450 FA_LAP2_NOT_ON_AT_LANDING
This fault occurs if the opening of the door at entrance 2, when there is a position reference, exceeds the time set in parameter Tmax. Doors (see MT. 5.5.4) before the open door limit switch LAP2 has been detected. (inputs LAP of extension 3.1)
The field 'Xtra Info' shows the logic position of the landing concerned
Fault of door automatism at entrance 2 (Obstruction, faulty contact LAP, problems with operator, etc.)
Check the landing door that caused the fault
Fault of extension 3.1.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 26 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason1800 AN_LCP1_OFF LCP of entrance 1 remains off.
This anomaly is detected only if parameter 5.5.8 LCP Entr1 is enabled.
Check door automatism and the closing limit switches of closed door LCP.
1801 AN_LCP2_OFF LCP of entrance 2 remains off.
This anomaly is detected only if parameter 5.5.8 LCP Entr2 is enabled.
Check door automatism and the closing limit switches of closed door LCP.
1804 AN_VO3_REST This anomaly occurs when variable V03 (speed greater than 0.3m/s) is on when the car is at rest.
No open door movements is possible until the recovery of this anomaly.
This anomaly is detected only if parameter 5.3.4.1.1 Control V03 is set to [PIC] or [REG].
Incorrect parameterization of the control (Menu 5.C.5)
If setting of parameter 5.3.4.1.1 Control V03 is [PIC]: damaged input E6 or error in its wiring.
Etc.
1805 AN_V03_NOT_ON_HIGH_SPEED
This anomaly occurs when variable V03 remains off during a movement that starts at a speed level greater than levelling speed (V0).No open door movements is possible until the recovery of this anomaly.
This anomaly is detected only if parameter 5.3.4.1.1 Control V03 is set to [PIC] or [REG].
Incorrect parameterization of the control (Menu 5.C.5)
If setting of parameter 5.3.4.1.1 Control V03 is [PIC]: damaged input E6 or error in its wiring.
tEtc.
1807 AN_CIRCUIT_JUMP_SECURITIES
During a door open movement, auxiliary circuit PPS did not jump the door securities.
On detecting this anomaly, levelling movements with open doors are cancelled until the anomaly is recovered with the MT (to recover the anomaly, activate MT's function 1.5REC.AVE.
This anomaly is detected only if the control includes the 'Relevelling w/ open door' option (see MT. 5.5.3.1 Ison.Pu.Abi.) or the 'Levelling w/ open door' option (see MT. 5.5.3.1 Nivel.Pu.Abi.).
Auxiliary circuit of open door movement PPS.
Wrong wiring.
1809 AN_NUM_CONSECUTIVE_NUGGING
The control carries out the forced closing of doors (nugging) the maximum number of times as set in parameter nugging (see T.M. 5.5.3.2).
The user constantly interrupts the door movement and activates this function continually.
Fault of the photocell or barrier-induced reopening circuit.
1810 AN_NO_HORIZONTAL_COM
There is no communication with the horizontal bus.
Horizontal bus disconnected, other controls of the group currentless, fault of the control.
1811 AN_OUT_DOOR_ZON_MOV_DO
There is no cause.
1812 AN_OVERRUN_RESCUE This anomaly is detected when the car stops outside the overlapping zone of the landing skatesduring the redirectioning to a floor in rescue mode .
This movement is done by the rescue system automatically in case of fault of power to the electric drives.
Excess speed of rescue movement.
1813 AN_CC_PERMANENT The full load switch CCC remains permanently on. The anomaly is detected when, the car being at rest, the full load switch CCC remains on for 30 seconds without any car call being registered.
Check adjustment of switch CCC, displayed in MT. 3.1.
2000 AN_TMAX_RELEV_UP During normal relevelling (at speed V0) in the up direction, the maximum permissible time (see MT. 5.3.3 Relevelling) was exceeded.
In hdyraulic drives, the a.m. time is increased by the value set in parameter 5.3.3. T.Desplaza.
Problems with the car movement (slipping, obstacle, lack of oil in hydraulic lifts, etc.).
Inadequate parameter setting, etc.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 27 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason2050 AN_TMAX_RELEV_DN During normal relevelling (at speed V0) in
the down direction, the maximum permissible time (see MT. 5.3.3 Relevelling) was exceeded.
Problems with the car movement (slipping, obstacle, lack of oil in hydraulic lifts, etc.).
Inadequate parameter setting, etc.
2100 AN_TMAX_FINE_REL_UP During inching (at speed V00) in the up direction, the maximum permissible time (see MT. 5.3.3 Relevelling) was exceeded).
Problems with the car movement (slipping, obstacle, lack of oil in hydraulic lifts, etc.)
Inadequate parameter setting, etc.
2150 AN_TMAX_FINE_REL_DN During inching (at speed V00) in the down direction, the maximum permissible time (see MT. 5.3.3 Relevelling) was exceeded).
tProblems with the car movement (slipping, obstacle, lack of oil in hydraulic lifts, etc.)
Inadequate parameter setting, etc.
2151 AN_CONSECUTIVE_RELEVEL
During relevelling, the car stopped in the opposite relevelling zone.
Relevelling speed (V0 or V00) is too high.
In the event of normal relevelling (speed V0), magnets CS/CB overlapping is small.
In the event of inching (speed V00) value of parameter Dist_V00 is small.
2200 FIRE AT FLOOR This anomaly occurs when the input of floor cancellation in case of fire turns on.
The Xtra Info field shows the number of the floor concerned.
The anomaly is detected only if parameter 5.A.1 Cancel.Floor.Fire is enabled.
The fire detector operated at one floor.
2264 AN_STARTS_ROPE The anomaly occurs when the number of starts exceeded the setting of parameter 5.3.4.8 LIM_AN_CABLE.
It applies to M33 lifts: parameter Valida AV CABLE is [YES]
IMPORTANT: Change the ropes.
To recover the anomaly after changing the ropes:\tActivate the door lock (MT. 4.3.1).
Set switch BMCM of emergency mode BMCM to position INS
Number of starts exceeded the setting of parameter 5.3.4.8 LIM_AN_CABLE.
2265 AN_NO_TEL_LINE System detected that the autodialler telephone line has been cut for a while.
Fault of the autodialler telephone line.
2266 AN_CEM2_REMAINS_OFF This contactor is not controlled presently.
2267 AN_CEM2_STUCK This contactor is not controlled presently.
2268 AN_AL_INV_RESC During a rescue with own inverter, a regulator alarm was detected.
Problems with the regulator.
UPS voltage too low.
2269 AN_DROP_CONTACT_RESC_INV
During a rescue with own inverter, system detected that one contactor dropped.
UPS voltage too low.
2270 AN_CEM1_REMAINS_OFF At the beginning of a rescue movement with own regulator, contactor CEM1 remains off.
The contactor does not make.
2271 AN_TMAX_RESCUE The time of redirectioning to a floor in rescue mode with electric drive exceeded the setting of parameter T.Max.Res (see MT. 5.3.3).This anomaly aborts the rescue movement in progress and prevents new rescue movementsto be performed.It is recovered using the MT and/or by entering the inspection mode.
Problems with the car movement (slipping, obstacle, etc.)
Inadequate parameter setting.
Problems with the rescue system (inadequate speed).
2272 AN_F24_RESCUING This anomaly occurs when the 24V power supply fails or drops (below 16V approx.) during theredirectioning of an electric lift to a floor in the rescue mode.
This anomaly aborts the rescue movement in progress and prevents new rescue movements to be performed.
To be able to carry out a new rescue, enable MT's function 1.5 REC. AVE. MEM.
Flat batteries of the UPS.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 28 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason2273 AN_EXT5.15 This anomaly occurs when extension 5.15
is dropped, only in regulated drives. Extensión 5.15 is dropped.
Vertical CAN bus failure.
2274 AN_EXT5.2 This anomaly occurs when extension 5.2 is dropped, only if smoke control is activated (TM 5.3.4.C).
Extensión 5.2 is dropped.
Vertical CAN bus failure.
2275 AN_EXT5.0 This anomaly occurs when extension 5.0 is dropped, only any of the following controls is activated. \t'Enable Firemen's' (TM 5.9.2)
'Enable evacuat.' (TM 5.9.3)
'Enable IAU' (TM 5.9.9)
'Enable AF' (TM 5.9.8)
'Enable ANU' (TM 5.9.A)
'Enable GEN' (TM 5.B.1)
Extensión 5.0 is dropped.
Vertical CAN bus failure.
2276 AN_EXT5.AI This anomaly occurs when any Extension 5.3 to 5.13 is dropped, only if\t'Cancel if fire' function (TM 5.A.1) is activated.
Any extension 5.0 to 5.13 is dropped.
Vertical CAN bus error.
2336 AN_BUSOFF_V The anomaly occurs each increment of 'Veces Bus OFF' and with parameter 'Val.CntrlBusOFF' activated. The anomaly is recovered after a 'T.Recup.BusOFF' time without increment of 'Veces Bus OFF' or with parameter 'Val.CntrlBusOFF' desactivated. See menu 4.3.8.
Fatal error in Vertical CAN bus.
2340 AN_FALTA_TLSV The anomaly occurs when it is detected that the autodialler is not present in the CAN Bus. Only if using Orona's autodialler. See parameter 'xxxx'
Autodialler is dropped.
Fatal error in Vertical CAN bus.
2400 AN_V>03_AT_STOP_POINT
The anomaly occurs when speed exceeds 0.3m/s when reaching the stopping point during the levelling process.It is detected only if parameter 5.3.4.1.1 Control V less than 03 is enabled.
Faulty parameterization of PIC (MT. 5.C.5)
Insufficient levelling distance:
o If positioning type is I: correct the speed change skates.
o If positioning type is II: parameterize the deceleration distance adequately acc.to drive.
If deceleration is too smooth, this distance can be reduced, if the drive is the variable type.
o Faulty drive.
o Speed relay circuit PCV (set-up].
o Wrong wiring, etc.
2402 AN_OVERRUN_MINUS In positioning type II:
After its stopping, the car parked before the levelling point less the setting of parameter Dist ERR Reb. (5.4.3.4)
In positioning type I:
After its stopping, the car parked before the levelling zone (the levelling zone is the intersection of CS and CB) but within the door zone (CS or CB on).
Problems with stopping:
Location of stopping skate
.\tBrake adjustment.
Parameter Dist ERR. Reb. (5.4.3.4) too small.
etc.
M

ARCA CONTROLLER ASSEMBLY INSTRUCTIONS STANDARD No.: 0466005.doc
REVISION No.: 4
PAGE 29 OF 29
Prepared by: A. Maritxalar
GENERAL INSTRUCTIONS
MAINTENANCE TERMINAL
Description of the faults of the device Control
No. Name Description Reason2403 AN_OVERRUN_PLUS In positioning type II:
After its stopping, the car parked beyond the levelling point plus the setting of parameter Dist ERR Reb. (5.4.3.4)
In positioning type I:
After its stopping, the car parked beyond the levelling zone (the levelling zone is the intersection of CS and CB) but within the door zone (CS or CB on).
The car reaches the stopping point at excess speed.
This may be due to several causes:
The deceleration distance required by the drive is greater than that provided by thepositioning system (In positioning type I correct the speed change skates.In positioning type II parameterize adequately acc. to drive.)
If deceleration is too smooth, this distance can be reduced, if the drive is the variable type or faulty.
Problems with stopping:
Location of stopping skate.
Brake adjustment
Parameter Dist ERR. Reb. (5.4.3.4) too small, etc.
2406 AN_STOP_OUTSIDE_DOOR_ZONE
Only in positioning system type I.
System detected that the car, after stopping, parked outside the door zone(CS and CB are off).
The car reaches the stopping point at excess speed
The deceleration distance required by the drive is greater than that provided by thepositioning system (In positioning type I correct the speed change skates.de cambio de velocidad. En posicionamiento tipo II parametrizar adecuadamente)
In positioning type II parameterize adequately acc. to drive.)
If deceleration is too smooth, this distance can be reduced, if the drive is the variable type or faulty.
Problems with stopping:
Location of stopping skate.
Brake adjustment, etc.
2407 LAST START_CPU There is no cause.
2414 AN_CHECKSUMSTORAGE At the start of the control, system detects that the checksum of the (parameters) FLASH does not coincide with the previously stored checksum.
In this event, the installation's default parameters are retrieved.
Power supply fault during the storing of the parameters.
Important: Immediately after a lift well exploration, the control stores the parameters automatically. It is therefore advisable not to switch power off immediately after a lift well exploration.
The battery is not connected, i.e. switch SW201 on CPU board is OFF. It must be set to ON.
The battery is flat or makes bad contact.
2415 AN_CHECKSUMBATTERY At the start of the control, system detects that the checksum of the battery-powered (parameters) RAM does not coincide with the previously stored checksum.
The battery is not connected, i.e. switch SW201 on CPU board is OFF. It must be set to ON.
The battery is flat or makes bad contact.
Power was switched off during the modification of parameters.
A new SW version has been loaded in the CPU.
M